 |
Главная |


Определение натяжения тягового органа в отдельных точках тягового контура
|
из
5.00
|
Этот метод основывается на том, что натяжение в Si каждой точке контура тягового органа равно натяжению в предыдущей точкеSi-1 плюс сопротивление Wi/i-1 перемещенного тягового органа на участке между этими точками:
Si= Si-1 + Wi/i-1 (10)
Следовательно, для того чтобы определить натяжение в любой точке тягового органа, необходимо знать сопротивление перемещения тягового органа на отдельных участках.
Характерные формы участков: прямолинейные – горизонтальный и наклонный груженые, горизонтальный и наклонный порожние; криволинейные – порожние при огибании барабанов и звездочек, груженые и порожние при огибании переходов от горизонтальных участков к наклонным, и наоборот; участки, с размещенными на них разгрузочными устройствами [4].
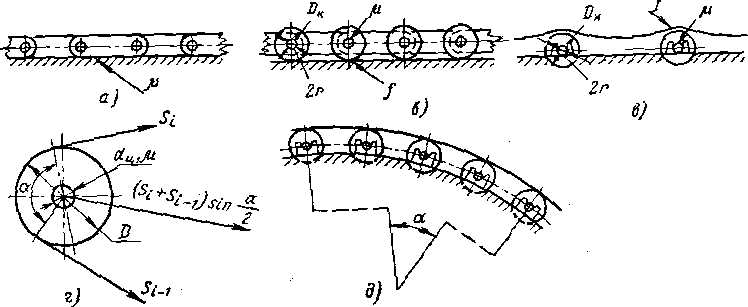
а - скольжение по направляющим
б - качение по направляющим
в - ленты по роликовым опорам
г - при огибании барабана или звездочек
д - при огибании ряда роликов
Рисунок 2 - Схемы для определения сопротивлений перемещению тягового органа
Прямолинейные участки. Основываясь на изложенном выше материале, сопротивление Wr.н на груженом, наклонном под углом α к горизонту прямолинейном участке длиной Lr.н при погонных массах материала qм в кг/м и движущихся элементов конвейера qк в кг/м можно представить так:
Wr.н=(qм + qк)gLr.н ώ cos α ± (qм+qк) g Lr.н sin α = (qм + qк)g Lr.н(ώ cos α ± sin α) (11)
Знак плюс относится к движению вверх, знак минус – к движению вниз.
Очевидно, что принимая в формуле qм = 0 можно получить сопротивление для порожнего участка:
Wп.н .= qк g Lп.н. (ώ cos α ± sin α) (12)
принимая α = 0 (sin α = 0, cos α = 1), получим сопротивление для горизонтальных участков:
Wr.r = (qм + qк) g Lr.r ώ (13)
Коэффициент сопротивления перемещению ώ зависит от типа тягового органа и его опор.
При скольжении тягового органа по направляющим (рисунок 2а) коэффициент сопротивления перемещению равен коэффициенту трения скольжения, т.е. ώ = μ.
При перемещении тягового органа на колесах по направляющим (рисунок 2б) коэффициент сопротивления перемещению определяется по формуле:

где Dк – диаметр ролика в м;
μ – коэффициент трения в цапфе (μ ≈ 0,11 при подшипниках скольжения и μ ≈ 0,025 при подшипниках качения);
r – радиус цапф в м;
f – коэффициент трения на поверхности ролика (f ≈ 0,0007 м);
k – коэффициент, учитывающий трения на торцевых частях ступицы и трения от поперечного скольжения колеса по рельсу (k = 1,3 при подшипниках скольжения и k = 2,0 при подшипниках качения) [4].
Для ленты, перемещающейся по роликам и барабанам (рисунок 2в), коэффициент ώ определяют по этой же формуле. При этом под f следует понимать условный коэффициент трения на поверхности ролика, учитывающий, кроме потерь, связанных с преодолением трения качения, также и потери на преодоление жесткости тягового органа при огибании им ролика и добавочного давления на опору из-за обхвата ролика лентой. Для данного случая ώ определяют экспериментально.
Так как отношение 2kr/Dк колеблется в узких пределах (1/3 – 1/6), коэффициент трения качения примерно постоянен, коэффициент сопротивления перемещению ώ является в основном функцией коэффициента трения в цапфе μ. Рекомендуемые для практических расчетов значения ώ даны в таблице 1[3]:
Таблица 1 – Рекомендуемые для практических расчетов значения коэффициента сопротивления перемещению – ώ
| Наименование | Значение ώ |
| скольжение тягового органа по направляющим | 0,30-0,40 |
| перемещение цепного тягового органа на опорных колесах с: а) подшипниками скольжения по направляющим б) подшипниками качения | 0.08 - 0.12 0,03- 0,04 |
| перемещение цепного тягового органа по опорным роликам с: а) подшипниками скольжения б) подшипниками качения | 0,12 – 0,16 0,05-0,08 |
| перемещение ленточного тягового органа по опорным роликам с подшипниками качения | 0, 03 - 0,04 |
Таблица 2 – Значения коэффициентов трения μ ленты о поверхность барабана
| Материал барабана | Окружающая среда | μ при ленте | |
| резинотканевой и резинотросовой | стальной | ||
| Чугун или сталь | Влажная Сухая Очень влажная | 0,20 0,30 0,10 | – – – |
| Футеровка из резинотканевой ленты | Влажная Сухая Очень влажная | 0,20 0,30 0,15 | 0,15 0,20 – |
| Футеровка из дерева | Влажная Сухая Очень влажная | 0,25 0,40 0,35 | – 0,35 0,30 |
Криволинейные участки. Сопротивление Wк на криволинейном участке (рисунок 2г) слагается из сопротивления  Wкт трения в цапфах опорных элементов и сопротивления Wж перегибу тяговых органов.
Wкт трения в цапфах опорных элементов и сопротивления Wж перегибу тяговых органов.
При диаметре цапфыdц = 2r, радиусе криволинейного участка R = D/2и натяжениях Si и Si-1 сопротивление трения в цапфах ветвей тягового органа определяется:

 (15)
(15)
где  – геометрическая сумма натяжений ветвей ленты, огибающих барабан (без большой погрешности можно принимать равной 2S1).
– геометрическая сумма натяжений ветвей ленты, огибающих барабан (без большой погрешности можно принимать равной 2S1).
Сопротивление перегибу Wж зависитот жесткости тягового органа, определяется из уравнения моментов относительно центра кривизны огибаемого элемента:
Si R – Si-1 R – (Si + Si-1) r μsin  – Wж R = 0 (16)
– Wж R = 0 (16)
откуда:
Wж = Si – Si-1 – (Si + Si-1)  μ sin
μ sin  (17)
(17)
или
 (18)
(18)
где ξ - коэффициент жесткости тягового органа, определяемый опытным путем.
Общее сопротивление на криволинейном участке:
 (19)
(19)
Для резинотканевых лент при 
получим:
при подшипниках качения:
Wkk = 0,014  (20)
(20)
при подшипниках скольжения:
Wkс = 0,03 (21)
Вследствие малой разности (  ) при огибании тяговым органом барабанов или звездочек можно принимать:
) при огибании тяговым органом барабанов или звездочек можно принимать:
Wkk ≈ 0,03 Si и Wkс ≈ 0,06 Si
Если огибаемый участок состоит из ряда роликов (рисунок 2д), то выведенная выше формула остается справедливой при постановке вместо члена 

 вышеуказанного значения ώ. В этом случае:
вышеуказанного значения ώ. В этом случае:
 (22)
(22)
Таблица 3 – Ориентировочные значения коэффициента жесткости ξ, [2]
| Вид тягового элемента | Значения | Примечание |
| Резинотканевые ленты Стальные ленты Проволочные канаты Тяговые цепи | 0,35 i / 1,3 Dб ≈ 0,0085 Δ / Dб 0,05 dк 2 / Dб μв dв / Dзв | i – число прокладок прорезиненной ленты; Dб – диаметр барабана или блока в см; δ – толщина стальной ленты в см; dk – диаметр каната в см; μв – коэффициент трения ролика цепи во втулке; dв – диаметр ролика цепи в см; Dзв – диаметр звездочки в см. |
|
из
5.00
|
Обсуждение в статье: Определение натяжения тягового органа в отдельных точках тягового контура |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы