 |
Главная |


Методические указания по выполнению курсовой работы
|
из
5.00
|
2.3.1. Теоретические основы
Принцип координированного регулирования представлен на рисунке 1.
Автомобиль, который покидает стоп–линию перекрестка А в момент времени t1и движетсяс определенной скоростью V,проходит магистраль без остановки в направлении А–G. Также безостановочно движется с постоянной скоростью V автомобиль, покидающий стоп-линию в момент времени t2. Временной интервал, заключенный в границах между t1 и t2,образует «ленту безостановочного движения» (ЛБД), т.е. «зеленую» полосу времени, двигаясь «внутри» которой вся группа автомобилей, собранная перед перекрестком А у стоп-линии, будет проезжать координируемую магистраль безостановочно.
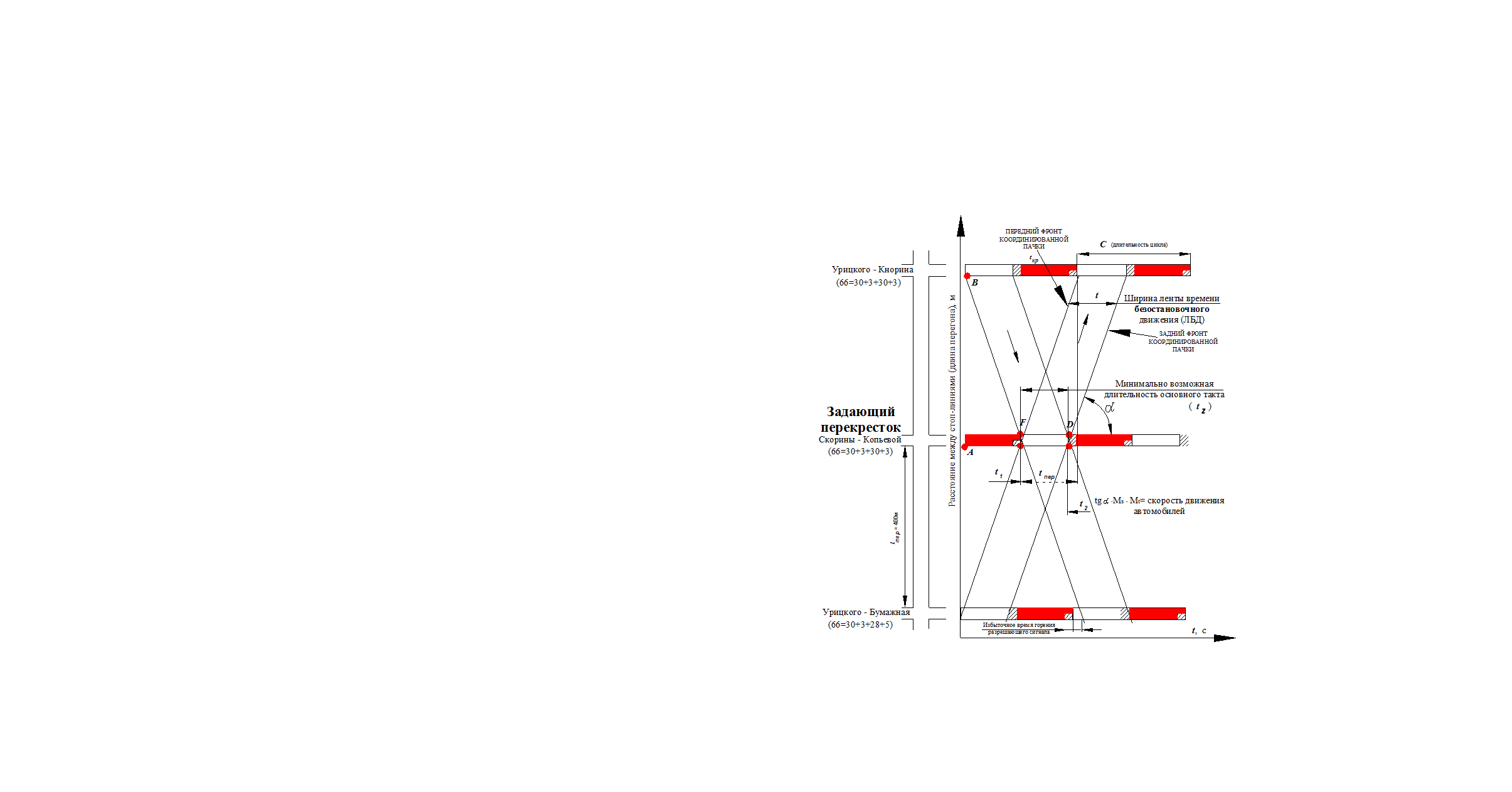
Рисунок 1 – Построение графика координированного регулирования
Условиями реализации координированного регулирования являются:
– равенство циклов светофорного регулирования на всех регулируемых участках (перекрестках и пешеходных переходах), расположенных на магистрали (на отдельных светофорных объектах может применяться цикл регулирования, кратный общему циклу на магистрали);
– величина сдвигов фаз на соседних светофорных объектах, согласованная со временем проезда транспортных средств между ними.
Величина сдвига фаз будет всегда меньше или равна циклу светофорного регулирования. Совокупность сдвигов фаз, длительностей фаз и цикла светофорного регулирования для всех светофорных объектов (СФО), входящих в систему координированного регулирования, образует программу координации (ПРК), графическим отображением которой является план координации (ПК).
При разработке АСУ ДД ведется подготовка нескольких программ координации, наиболее полно отражающих заданные условия движения в данный период времени. Характеристики транспортных потоков могут быть получены экспериментально с использованием детекторов транспорта или счетчиков-наблюдателей либо определены путем прогнозирования с использованием статистических методов.
Формирование программы и плана координации – достаточно сложный и трудоемкий процесс. Как правило, он выполняется с использованием графо-аналитического метода и включает в себя следующие этапы:
– подготовку исходных данных;
– разработку (корректировку) схем организации дорожного движения на регулируемых участках магистрали;
– пересчет длительности цикла регулирования и определение основных параметров программы координации;
– построение плана (графика) координации.
Использование компьютерной техники позволяет ускорить формирование ПРК и построение ПК, а также объединять в единую координированную систему не только небольшие группы СФО, но и сети пересекающихся улиц, составляющие районы координации. В этом случае требуется алгоритм автоматизированного нахождения важнейших маршрутов координации и задающих СФО, составляющих границы сетевого района. Как уже отмечалось, при расстояниях между соседними перекрестками свыше 800–900 м координированная «пачка» автомобилей практически распадается, поэтому такие перегоны определяют естественные границы района координации в случаях, когда для поддержания параметров группы ТС не используются предсигналы, которые сохраняют ее структуру и динамические свойства.
Выбор ПРК в зависимости от параметров транспортных потоков и условий движения основан на выборе модели, адекватной «образу», т.е. имеющейся реальной транспортной ситуации на координируемой магистрали. В качестве образов используются наборы исходной информации, для которых рассчитаны все программы координации, хранящиеся в электронной базе данных. Близость к образу оценивается каким-либо критерием. В качестве простейшего критерия может быть принят минимум суммы среднеквадратических отклонений от заданного значения.
Минусом такого управления с выбором программ координации из базы данных является запаздывание системы – в определенный период выбранная программа координации базируется на данных предыдущего периода, в котором условия движения, естественно, отличаются. Как правило, для устранения такого расхождения данные, полученные в конце периода измерения, используются для прогнозирования условий движения на следующий период, и на этой основе осуществляется выбор программы координации. При этом также может формироваться база данных оперативных схем ОДД на дорожной сети, реализуемых с помощью многопозиционных управляемых дорожных знаков.
Более гибкой является система, в которой расчет программ координации выполняется непосредственно по результатам измерения параметров и условий движения в реальном масштабе времени. В этом случае на систему накладывается жесткое условие обеспечения высокого быстродействия.
Местная коррекция программ координации выполняется на основании данных от детекторов транспорта, установленных на подходах к перекрестку. С помощью детекторов регистрируется появление разрыва в транспортном потоке в зоне действия каждого перекрестка. Для обеспечения координации транспортным потокам, движущимся в основном направлении, гарантируется определенная минимальная ширина ЛБД. Существуют методы, позволяющие, например, по величине задержек корректировать длительность фаз при длительности светофорного цикла, жестко заданной ПРК.
Период перехода от одной ПРК к другой связан с некоторыми неизбежными издержками, поскольку сами по себе ПРК могут отличаться длительностями светофорного цикла и составляющих его фаз, а также величиной сдвигов фаз. Для реализации переходного процесса используется специальный алгоритм, который заключается в увеличении длительности фазы, действующей в направлении координации в предыдущей программе, до момента включения одноименной фазы в новой программе координации. Обычно этот момент в системе «известен» заранее, и до его наступления возможен пропуск через перекрестки потоков конфликтующих направлений без особых потерь – как правило, соответствующие фазы «укладываются» в отведенный отрезок времени. Такой переход занимает более короткий период времени.
2.3.2. Оценка существующей координации
Наиболее простой является оценка по коэффициенту безостановочной проходимости:
 ,
,
где q – интенсивность движения всего потока в данном направлении, авт./с;
qо – интенсивность движения остановленного потока, авт./с.
Считается, что координированное регулирование является эффективным, если β ≥ 0,8.
Более детальная оценка качества существующей координации на исследуемой магистрали может выполняться путем измерения импульса интенсивности на входе в перекресток. Осуществляется подсчет числа остановленных автомобилей, а затем рассчитывается коэффициент безостановочной проходимости, Kб:
 ,
,
где nк – транспортные средства, прибывшие на запрещающий сигнал светофора, авт.;
n* – транспортные средства, прибывшие на разрешающий сигнал светофора, но остановленные очередью, авт.;
n – общее число автомобилей, прибывших к перекрестку, авт.
Оценка координации может выполняться, помимо этого, по ширине ленты времени безостановочного движения. Ширина ЛБД, как правило, должна быть не менее 0,3 от длительности светофорного цикла.
Скорость сообщения и градиент скоростихарактеризуют экономию времени и, таким образом, условия движения на координированном направлении. Эти показатели при координированном и локальном регулировании различны, их сравнение позволяет оценить эффективность системы и сопоставить различные варианты планов координации.
Эффективность также может оцениваться гарантией безостановочного проезда. Под гарантией понимается потенциальная возможность безостановочного проезда последующего светофорного объекта, если водитель проехал предыдущий объект на зеленый сигнал и выполнил требования заданной скорости движения. Гарантия безостановочного прохождения последующего СФО определяется по формуле

где tz1 – длительность зеленого сигнала на предыдущем объекте, с;
tизб12 – избыточная (с обеих сторон ЛБД), по отношению к последующему объекту, длительность зеленого сигнала на предыдущем объекте, с.
Гарантия безостановочного движения на координируемом участке определяется как произведение гарантий на отдельных СФО:
 .
.
| Рис.4.53. Расположение ТС при движении по магистрали: а -идеальная координация; б - частичная координация; 1 - координированные пачки; 2 - внепачковые ТС. |
2.3.3. Исходные данные для построения новых планов координированного регулирования:
1. План магистрали и перекрестков в масштабе 1:500 (или 1:1000), на котором указываются:
– характеристики проезжей части вдоль магистрали и на поперечных направлениях;
– расстояния между стоп-линиями в координируемых направлениях;
– места размещения остановочных пунктов маршрутных транспортных средств;
– данные по транспортно-пешеходной нагрузке с изменениями по времени суток;
– данные о скорости движения (или времени проезда) транспортных потоков на каждом из перегонов магистрали.
2. Схемы существующей ОДД на всех регулируемых участках магистрали в масштабе 1:500. На них указываются места установки светофоров и дорожных знаков, определяющих использование полос движения.
3. Схемы пофазного движения и диаграммы регулирования для всех СФО магистрали.
После сбора исходных данных определяются сдвиги фаз в координируемых направлениях – интервалы времени между моментами включения зеленых сигналов в координируемых направлениях на смежных СФО.
Необходимо отметить, что наилучшие результаты при введении координированного регулирования обеспечиваются при двухфазных схемах организации движения на перекрестках, поскольку двухфазный светофорный цикл обладает максимальной пропускной способностью. Поэтому при исследовании существующих многофазных схем пофазного движения следует проверить возможность их упрощения за счет выделения отдельных полос для ожидания поворотных транспортных средств, организации отнесенных левых поворотов и т.п.
В зависимости от расстояния между стоп-линиями соседних СФО определяется целесообразная длительность светофорного цикла С:
 , с;
, с;  , с
, с
где S – длина перегона, (расстояние между стоп-линиями одного направления на соседних СФО, включая предыдущий перекресток), м;
V – скорость движения, м/с;
n – целое натуральное число: 1, 2, 3. Начинать следует с n = 1.
Для этого цикла проверяют выполнение ограничений по пешеходному движению и коэффициенту загрузки полосы движением для существующей или скорректированной схемы пофазного движения.
Данные о скорости движения получают путем измерения мгновенной скорости на перегонах, скорости сообщения по магистрали, а также среднего времени проезда перегонов между СФО. Для расчётной скорости на перегоне в дальнейшем используется величина, равная скорости 85%-й обеспеченности. Скорость сообщения определяется по суммарному времени прохождения исследуемого участка дороги. Для измерения может использоваться метод «плавающего» автомобиля. При проведении нескольких замеров и получении стабильных показателей скорости сообщения в качестве расчётной скорости рекомендуется принимать значение на 5–10 км/ч больше полученного при замерах.
Величина задержек в движении определяется как разница во времени при реальных условиях движения и при движении с расчётной скоростью без остановок.
2.3.4. Построение плана координированного регулирования и его коррекция
В курсовой работе предусмотрено построение графиков координированного регулирования графо-аналитическим методом для 3–4 СФО вручную, а для всей координированной магистрали – с применением специальной компьютерной программы.
Построение плана координации выполняется следующим образом. На листе миллиметровой бумаги наносится план магистрали и параллельно ему проводится ось ординат графика координации – на ней откладываются расстояния между стоп-линиями СФО в метрах в соответствии с принятым масштабом (см. рисунок 1). Через стоп-линии координируемых направлений каждого перекрестка проводятся горизонтальные прямые, пересекающие под прямым углом ось ординат. Расстояние между прямыми будет соответствовать в масштабе ширине перекрестка (или расстоянию между стоп-линиями в зоне пешеходного перехода вне перекрестка), расстояние между ближайшими прямыми соседних светофорных объектов – длине перегона. В горизонтальном направлении по построенным прямым откладывается время в секундах.
Полосы, получившиеся между прямыми, разбиваются на две части – верхнюю и нижнюю. В нижней части откладываются длительности сигналов светофора для прямого направлении, в верхней части – для обратного направления. При этом желтые и красно-желтые сигналы могут присоединяться к красному и не выделяться отдельно.
Расстояние между соответствующими стоп-линиями в любом из двух противоположных направлений (например, «юг-север» или «север-юг») представляет собой длину перегона между двумя соседними СФО. Первая стоп-линия в направлении «юг-север» («туда») задающего перекрестка условно принимается за ось абсцисс. Через начало и конец зеленого сигнала проведем линии скорости движения по перегону в направлении «туда» («юг–север»). Тангенс наклона этих линий tgα представляет собой отношение длины перегона (lпер) ко времени проезда автомобилей по нему (lпер). Левая (первая) линия показывает скорость движения переднего фронта координированной пачки автомобилей, стартовавших от стоп-линии в момент времени t1, а дальняя (правая, вторая) линия скорости – задний фронт пачки, т.е. автомобили, которые преодолели стоп-линию в момент времени t2, соответствующий последнему моменту горения разрешающего сигнала светофора для данного направления. Необходимо отметить, что наклон линий времени по скорости определяется:
 ,
,
где Мг – масштаб горизонтальный с/мм;
Мв – масштаб вертикальный м/мм;
V – скорость движения. км/ч. Саму ширину ленты безостановочного движения (ЛБД) можно определить исходя из условия допустимой нагрузки:
 , с
, с
где q – интенсивность транзитного (прямого) направления на данном перегоне, авт./с;
i – число полос движения, шт;
Xlim – предельное значение коэффициент загрузки полосы движением. Значения Xlim должны находиться в пределах 0,7–0,85.
Мы упростим вариант рассмотрения – пусть скорость движения вдоль магистрали постоянная и одинакова для всех направлений и перегонов. Тогда, продолжив эти две линии скорости в пределах графика, построим границы ленты времени, при которых возможно безостановочное движение данной пачки автомобилей, успевших проехать через стоп-линию на задающем светофоре.
Для подбора структуры светофорного цикла для каждого светофорного объекта готовятся полоски прозрачной бумаги, ширина которых равна расстоянию между стоп-линиями (ширине перекрестка) в масштабе оси ординат. На каждой полоске откладываются 2-3 светофорных цикла в масштабе оси абсцисс. Внутри каждого цикла время распределяется между разрешающим и запрещающим сигналами.
Затем эти полоски накладываются между стоп-линиями каждого перекрестка так, чтобы полученная лента времени проходила внутри основного такта на каждом светофорном объекте магистрали (т.е. обеспечивалась одинаковая длительность зеленого сигнала вдоль магистрали). «Избыток» времени основного такта можно распределять равномерно в начале и конце ЛБД, либо по любой из ее сторон в зависимости от специфики движения через СФО. Например, оставив «избыток» вначале, можно выпустить с перекрестка транспортные средства, выехавшие на магистраль на перегоне и скопившиеся у стоп-линии, до приезда переднего фронта координированной пачки.
Требуемое опережение включения зеленого сигнала светофоров на последующих перекрестках для пропуска внепачковых автомобилей tоп:
 , с;
, с;
где n – число внепачковых автомобилей на полосе:
 , шт.,
, шт.,
где qвн – интенсивность движения внепачковых автомобилей на перегоне, авт./с;
 – число полос движения перед стоп-линией.
– число полос движения перед стоп-линией.
Затем полоски фиксируются, и таким образом получается ЛБД по магистрали в направлении «туда» («юг-север»). Аналогично можно построить ЛБД на этом же графике для встречного направления («север–юг»).
2.3.5. Коррекция плана координации
В идеальной ситуации ЛБД обоих направлений попадают на зеленый сигнал на всех СФО. В реальной ситуации высока вероятность того, что ЛБД в обратном направлении на некоторых светофорных объектах попадает только частично внутрь заданного основного такта. На таких светофорных объектах при наличии избыточного зеленого сигнала следует подвинуть влево или вправо полоску бумаги с нанесенными сигналами светофора. Если это не приносит успеха, то возможно использование следующих приемов:
1. Увеличить длительность цикла (при этом длительности основных тактов могут изменяться пропорционально или в разном соотношении).
2. Несколько изменить (ускорить или замедлить) скорость движения координированной пачки автомобилей (при этом изменится наклон ЛБД). Корректировка скорости движения достигается применением управляемых знаков предписываемой или рекомендуемой скорости, которые могут изменять значения с дискретностью ± 10 км/ч, указателей скорости.
Могут использоваться варианты, когда скорость переднего фронта координированной группы остается неизменной, а скорость заднего фронта увеличивается, т.е. происходит постепенное «сжатие» координированной группы автомобилей в пределах перегона. При необходимости может использоваться и обратный прием – «растяжение» группы («пачки»). При изменении скорости движения по перегону ЛБД получается «ломаной».
Для корректировки графика координированного регулирования может применяться ряд методов:
1. Уменьшение ширины ЛБД до значения tЛВ = 2n + 1, где n – число автомобилей в «пачке».
2. Учёт поворотного движения (расположение места поворота на перекрестке, до или после него, с обособленных поворотных полос, при движении на дополнительную секцию светофора и т.д.). При умеренной интенсивности допускается организовывать левоповоротное движение методом просачивания.
3. Учёт движения внепачковых автомобилей, выехавших со второстепенных улиц и проездов. Такие автомобили в первом цикле не попадают на зелёный сигнал светофора, поэтому можно корректировать их движение указателями скорости или предсигналами с организацией стоп-линий вне перекрестков, используя избыточную длительность зеленого сигнала.
Таким образом, для каждого СФО уточняются длительности тактов и сдвиги фаз в основном (координируемом) направлении. На этом процесс подготовки графика координации закончен.
Полученные значения заносят в базу данных, которая содержит исходные данные для подготовки технических средств АСУ ДД к работе.
2.3.6. Реализация плана координированного регулирования
После разработки и отладки плана координации студенту необходимо рассчитать параметры, которые заносятся в блоки дорожных контроллеров (ДК) для обеспечения согласованной работы СФО.
В современных ДК производства Республики Беларусь (БДК, ДУМКА) запись временных уставок, обеспечивающих координированное регулирование, производится путем программирования их микропроцессоров с использованием специального программного обеспечения.
В курсовой работе студент должен рассмотреть два варианта технической реализации разработанного плана координации с использованием контроллеров БДК или ДУМКА:
1) бесцентровая система с использованием модулей зонального центра (МЗЦ) или контроллеров зонального центра (КЗЦ);
2) центровая система, в которой согласованная работа ДК реализуется по командам телеуправления из ЦУП (ЦДП) АСУДД.
В бесцентровой системы на базе контроллеров Думка в один из контролеров должен быть установлен блок модуля зонального центра (МЗЦ), который может обеспечить согласованную работу до 16 контроллеров (включая тот ДК, в который установлен МЗЦ).
Контроллер с блоком МЗЦ должен быть соединен каналами связи (проводным или GSM-связи) с контроллерами всех светофорных объектов, включенных в систему. В память блока МЗЦ заносится информация о сдвигах фаз для всех подключенных контроллеров.
При использовании центровой системы ДК переключает сигналы светофоров по командам из ЦДП АСУДД, где работа СФО координируется. При использовании проводных каналов связи прием и передачу информации из ЦУП осуществляет блок, обрабатывающий протокол передачи данных АСС УД. Из ЦДП в ДК передаются сигналы телеуправления. ДК передает в ЦДП данные телесигнализации о разрешении режима, состоянии контроллера и его исправности, а также информацию телеизмерения от детекторов транспорта (при их наличии). Вызов от ТВП реализуется так же, как и в режиме программного управления, однако снятие запроса координированного регулирования осуществляется из ЦУП (ЦДП).
Местная коррекция
Для ее реализации применяются элементы режима местного гибкого регулирования.
При прохождении автомобилей над индуктивными рамками в ДК формируются запросы с соответствующих направлений. При нахождении разрыва в транспортном потоке при окончании максимальной длительности текущей фазы выдается сигнал вызова фазы, в которой участвует запрашиваемое направление. При запросах с нескольких направлений вызывается ближайшая по циклу фаза.
По результатам выполнения раздела 2.3.4 студент должен заполнить:
– таблицу расписания планов координации (карту времени, таблица 4);
– таблицу привязки планов координации (таблица 5).
Таблица 4 заполняется по результатам экспериментальных исследований характеристик потоков и оценки параметров эффективности планов координации.
Таблица 4 – Карта времени
| День недели | Номер сектора | Номер карты | |||
| Номер плана координации | Время включения плана координации | ||||
| Час смены | Минуты смены | ||||
В таблицу 5 заносятся данные, обеспечивающие включение разрешающих сигналов светофоров в координируемых направлениях в нужный момент времени.
Таблица 5 – Параметры программы (плана) координации
| Скорость, км/ч | Цикл, с | Номер сектора | Номер плана: | |||||||||||||
| Номер ДК | Цикл, с | Номер варианта фазы, время включения (с), интервал МГР (с) | Номер позиции УЗН | |||||||||||||
| Nф | tвкл | t | Nф | tвкл | t | Nф | tвкл | t | Nф | tвкл | t | |||||
Для заполнения таблиц выполняются следующие работы:
1. Вначале по плану координации определяется сдвиг между моментом включения необходимого зеленого сигнала и условной нулевой (базовой) линией отсчета сдвигов. Положение нулевой линии является произвольным, однако для удобства ее рекомендуется проводить через начало зеленого сигнала (через начало основного такта на диаграмме светофорного регулирования) в координируемом направлении на одном из СФО магистрали.
2. Для вызова фазы, обеспечивающей включение зеленого сигнал в координируемом направлении, запрос на ее включение должен быть заранее для того, чтобы ДК успел отработать промежуточный такт светофорного цикла (Тпром) перед основным тактом (Тосн) вызываемой фазы (рисунок 2). Поэтому величина сдвига, заносимого в таблицу 6, должна быть уменьшена на длительность предшествующего Тпром.

Рисунок 2 –Определение время сдвига включения фазы (tвкл )
Например, для перекрестка 1 (см. рисунок 2) необходимый сдвиг включения зеленого сигнала по плану координации составляет 37 с. Для включения сигнала в этот момент вызов фазы дорожного контроллера, обеспечивающей его включение, должен быть передан с упреждением на 9 с (длительность предшествующего Тпром). Поэтому итоговый сдвиг, который будет занесен в таблицу 6 для 1-й фазы, составит 37 – 9 = 28 с.
Сдвиг должен быть определен для каждой фазы на всех СФО. Набор сдвигов для всех СФО, объединенных в магистраль, составляет программу координации. Для остальных разработанных программ координации также должны быть заполнены аналогичные таблицы.
|
из
5.00
|
Обсуждение в статье: Методические указания по выполнению курсовой работы |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы