 |
Главная |


Моделирования замкнутой системы автоматического регулирования
|
из
5.00
|
Подаём единичное ступенчатое воздействие на замкнутую систему по каналу задания:
n1=[-0.7362.4533]; d1=[11.088 54.08 64.5667 26 3.3333];
n2=[1.755 1]; d2=[1.3 0];
[num1,den1]= series (n1,d1,n2,d2);
[num2,den2]=Cloop(num1,den1,-1);
printsys(num2,den2,'p');
step(num2,den2);
gridon;
Получаю график переходного процесса (рисунок ). Очевидно, что настройки не подходят.

Рисунок - График регулирования до коррекции настроек регулятора
Для устойчивости системы: подбираю настройки регулятора, изменяю передаточную функцию регулятора, чтобы перерегулирование составляло 40-45%, а время регулирования – 35,2, записываю изменённый программный код.
n1=[-0.736 2.4533]; d1=[11.088 54.08 64.5667 26 3.3333];
n2=[6.5 1]; d2=[2.3 0];
[num1,den1]= series (n1,d1,n2,d2);
[num2,den2]=Cloop(num1,den1,-1);
printsys(num2,den2,'p');
step(num2,den2);
grid on;
 =
= 

Рисунок 16 - Динамическая характеристика полученной системы регулирования
Получаем общую передаточную функцию всей системы:
-4.784 p^2 + 15.2105 p + 2.4533
----------------------------------------------------------------
25.5024 p^5 + 124.384 p^4 + 148.5034 p^3 + 55.016 p^2 + 22.877 p+ 2.4533
Оценка качества регулирования
Качество автоматических систем управления определяется совокупностью свойств обеспечивающих эффективное функционирование системы. Свойства составляющие эту совокупность и имеющие качественные и количественные измерители называют показателями качества.
Основные показатели качества:
1) Длительность переходного процесса.
2) Перерегулирование.
3) Максимальное динамическое отклонение.
4) Число колебаний регулируемой величины около линии установившегося значения за время регулирования.
5) Запас устойчивости по амплитуде.
Для определения времени регулирования tп по обе стороны от прямой х(∞) на одинаковом расстоянии ε (обычно принимают за 5% от первого максимума) проводим прямые, параллельные оси абсцисс. Таким образом, время регулирования tп определяется временем, когда переходная характеристика в последний раз пересекает любую из проведенных прямых рисунок 13.

Рисунок 17 - Диаграмма определения качественных показателей переходного процесса
Из рисунка 17 определяем время регулирования:
tп=35сек.
Максимально допустимое время регулирования 35,2. По времени регулирования настройки регулятора подходят
Перерегулированием σ называют максимальное отклонение регулируемой величины от установившегося значения, выраженное в процентах от х(∞).
σ=(0,41/1)*100%=41%
Допустимое перерегулирование составляет 40-45%. По перерегулированию Настройки регулятора подходят.

Рисунок 18 - Диаграмма определения качественных показателей переходного процесса
Число колебаний регулируемой величины, около линии установившегося значения, за время регулирования.
n=4
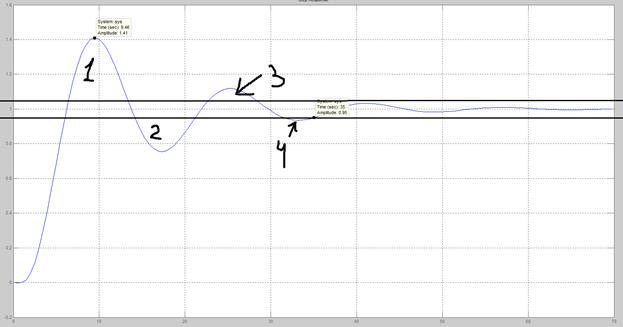
Рисунок 19 - Диаграмма определения качественных показателей переходного процесса
ЗАКЛЮЧЕНИЕ
При работе данного курсового проекта, я проанализировал структурную схему объекта регулирования, приведенную в методическом указании. Определил передаточную функцию путем сложения последовательно соединенных апериодических звеньев. Определил кривую переходного процесса модели объекта регулирования в программном комплексе MatLab. Также с помощью этой программы вывел частотные характеристики объекта регулирования.
Произвел выбор закона регулирования и критерии регулирования графоаналитическим способом, определил частотные характеристики регулятора.
Проанализировав замкнутую систему автоматического регулирования и подставив в неё регулятор по каналу задания, смоделировал систему автоматического регулирования, откорректировал значение настройки регулятора для получения оптимальной динамической характеристики данной системы. Затем производя оценку качества регулирования, определил время регулирования, величину перерегулирования, максимальное отклонение регулируемой величины и число колебаний регулируемой величины.
Пользуясь полученными формулами, рассчитал настройки регулятора.
Приложение А
(Справочное)
График переходного процесса, промоделированная система автоматического регулирования

Рисунок А1 - График переходного процесса, промоделированная система автоматического регулирования
Приложение Б
(Справочное)
АФЧХ системы

Рисунок Б1 - АФЧХ системы
|
из
5.00
|
Обсуждение в статье: Моделирования замкнутой системы автоматического регулирования |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы