 |
Главная |


КЛАССА «ВОЗДУХ-ПОВЕРХНОСТЬ»
|
из
5.00
|
А.И. ДАНЕКО Д.Л. ЧЕЧИК
АВИАЦИОННЫЕ УПРАВЛЯЕМЫЕ РАКЕТЫ
КЛАССА «ВОЗДУХ-ПОВЕРХНОСТЬ»
Учебное пособие
Под редакцией Г.А. Соколовского
(Для дневной и вечерней форм обучения)
701-806-93/ДСП Утверждено
на заседании редсовета
28 октября 1991 г.
Москва
Издательство МАИ
Данеко А.И., Чечик Д.Л. Авиационные управляемые ракеты класса «воздух-поверхность». /Под ред. Г.А. Соколовского: Учебное пособие. – М.: Изд-во МАИ, 1992. – 44 с. : ил.
Излагаются принципы действия и устройства ракет класса «воздух-поверхность». Физическая сущность процессов, сопровождающих работу отдельных элементов и подсистем
ракеты при пуске и наведении, рассматривается на примере ракет, используемых для вооружения фронтовой авиации.
Предназначено для студентов, инженерно-технических и научных работников,
изучающих вопросы проектирования и применения авиационных ракет.
Рецензисты: В.В. Ищенко, Б.А. Черпаков.
Тем. План 1992, поз.
Данеко Александр Иванович
Чечик Дмитрий Леонидович
АВИАЦИОННЫЕ УПРАВЛЯЕМЫЕ РАКЕТЫ
КЛАССА «ВОЗДУХ-ПОВЕРХНОСТЬ»
Редактор Р.Н. Фаустова
Техн. Редактор Е.А. Смирнова
Подписано в печать 27.01.92
Бум. офсетная. Формат : 60х84 1/16. Печать офсетная
Усл. печ. л. 2,56. Уч. –изд. 2,62. Тираж 75
Зак. 2д/419. Бесплатно
Типография издательства МАИ
125871 Москва, Волоколамское шоссе, 4.
ã Московский авиационный институт, 1992.
ВВЕДЕНИЕ
Управляемые ракеты класса "воздух-поверхность" - это ракетное оружие авиации. Используя их, авиация решает следующие задачи:
1. Непосредственная поддержка войск в радиусе до 100 км: поражение танков, бронетранспортеров, артиллерийских и ракетных установок, огневых средств и живой силы противника.
2. Изоляция поля боя: поражение мостов, переправ, транспортных узлов, скопления войск и резервов на марше - на глубине от 100 до 500 км.
3. Подавление наземной ПВО, поражение радиолокационных станций, ракетных и артиллерийских установок комплексов ПВО противника на маршруте ударной группировки.
4. Действие в оперативной глубине обороны противника и нанесение удара по стратегическим целям (авиационные базы, стартовые позиции ракет, военно-промышленные объекты, энергетические узлы, порты с находящимися в них кораблями и т.п.) без проникновения носителя в зону действия территориальной ПВО противника.
Разнообразие целей для ракет "воздух-поверхность" по размерам, уязвимости, информационным свойствам, способности к активной обороне обусловливает большой диапазон тактико-технических характеристик этих ракет. Тем не менее облик ракеты в значительной мере определяется дальностью ее полета, поэтому в основу классификации ракет класса "воздух-поверхность" положен принцип дальности. Различают ракеты малой, средней и большой дальности [I] .
Ракеты малой дальности применяются в условиях визуального обнаружения, опознавания и прицеливания по неконтрастным и слабоконтрастным целям с соответствующими системами наведения. Дальность при наведении на крупноразмерные цели достигает 10...15 км, а при атаке малоразмерных целей уменьшается до 3...5 км. Атака с такой дальностью, как и атака неуправляемым оружием (бомбами, неуправляемыми авиационными ракетами и т.д.), происходит в зоне действия практически всех средств ПВО цели и требует, как правило, предварительного удара по средствам ПВО противника. На ракетах малой дальности используются системы ручного радиокомандного наведения (или с передачей команд по проводам) и наведения по закрепленному радиолучу, системы телевизионного самонаведения и самонаведения по лазерному подсвету, а также тепловые и тепловизионные системы самонаведения. Стартовая масса этих ракет от 15 до 300 кг и более. Следует отметить, что стартовая масса всех ракет класса "воздух-поверхность" зависит не только от дальности полета, но и от массы полезной нагрузки - системы управления и боевого снаряжения.
Ракеты средней дальности - это ракеты, дальность пуска которых не требует от носителя входа в зону действия объектовой или местной ПВО цели. Их дальность находится в пределах от 30 до 100 км и более. Системы наведения этих ракет не получают перед пуском непосредственного целеуказания от оператора, так как визуальное обнаружение, опознавание цели и прицеливание на таких дальностях невозможно. Поэтому на ракетах средней дальности применяются системы телевизионно-командного наведения, комбинированные системы наведения (инерциальные и астроинерциальные с самонаведением на конечном участке траектории, которое реализуется с помощью активной или полуактивной РГС); широко используются противорадиолокационные системы самонаведения с пассивными РГС, работающими по излучению радиолокаторов авиационных, ракетных и артиллерийских комплексов ПВО. Стартовая масса ракет средней дальности находится в пределах от 200 до 1000 кг.
К ракетам класса "воздух-поверхность" большой дальности относятся главным образом стратегические ракеты с ядерным боевым снаряжением, концепция создания которых связана с задачей ядерной бомбардировки объектов в глубоком тылу противника без входа носителя ядерного оружия в зону действия не только объектовой, но и территориальной ПВО. Поэтому ракеты большой дальности оснащаются автономными или корректируемыми инерциальными системами наведения. Коррекция траектории осуществляется в результате уточнения информации о положении ракеты ориентацией на местности по ее рельефу, фотографической или магнитной карте или путем перехода на самонаведение по обнаруженной цели. Дальность пуска этих ракет достигает 1000...2000 км и более, а стартовая масса свыше 1000 кг.
В данной работе физическая сущность процессов, сопровождающих работу отдельных элементов и подсистем ракеты при пуске и наведении рассматривается на примере ракет, предназначенных для вооружения фронтовой ударной авиации [I...3].
Глава I. ОБЩИЕ СВЕДЕНИЯ О РАКЕТАХ
I.I. НАЗНАЧЕНИЕ РАКЕТ
Самолеты фронтовой ударной авиации вооружаются ракетами малой и средней дальности. Эти ракеты по своей конструкции и аэродинамической схеме имеют много общего и отличаются лишь системами наведения. Поэтому часто их делают в модульном исполнении: ракеты, выполненные в одном калибре, но с различными системами наведения, позволяющими поражать большое разнообразие целей. Такой подход значительно снижает время разработки новой ракеты и ее стоимость.
По целям, видимым для человеческого глаза, но неконтрастным для технических средств, применяются обычно командные методы наведения с визуальным прямым или оптико-телевизионным наблюдением цели или методы самонаведения по отраженному лазерному излучению, направленному оператором на цель. По активно излучающим целям, например действующим радиолокаторам, применяются пассивные пеленгаторы, работающие в сантиметровом или дециметровом диапазонах радиоизлучения РЛС. Примером таких модульных ракет являются ракеты малой дальности, показанные на рис. I.I. Стартовая масса этих ракет до 320 кг, а боевая часть фугасного действия массой около 90 кг. Ракеты могут быть с тремя вариантами систем наведения:
с полуактивной лазерный головкой самонаведения;
с пассивной радиолокационной головкой самонаведения;
с аппаратурой радиокомандного наведения.
Основными целями ракет МП с лазерным полуактивным самонаведением и ракет МР с радиокомандным наведением являются: кабины РЛС; пусковые установки комплексов ЗУР, тактических и оперативно-тактических ракет; самолеты на открытых стоянках и в легких укрытиях; легкие мосты и переправы; малотоннажные суда и десантно-высадочные средства в прибрежной полосе; железнодорожные эшелоны и т.д.
Ракеты МП с пассивной радиолокационной головкой самонаведения предназначены для поражения наземных радиолокационных станций зенитных ракетных комплексов, а также автоматических многоствольных зенитных артиллерийских систем. Причем на ракету могут быть установлены пассивные пеленгаторы, работающие не только при непрерывном излучении РЛС, но и в импульсном режиме.
На ракетах устанавливается однорежимный двигатель твердого топлива с суммарным импульсом порядка 180000 Н*с, обеспечивающим им сверхзвуковую скорость полета. Высота пуска ракеты может изменяться от 50 до 5000 м. Но для безопасности носителя выгоднее летать на малых высота* (Н < 200 м), где он недосягаем для многих типов ЗУР, поэтому скорость носителя в момент пуска ракеты обычно дозвуковая М£ I.

|
Ракеты выполнены по аэродинамической схеме "утка" с Х-образным расположением крыльев и рулей в двух взаимно перпендикулярных плоскостях. Управление ракетой по курсу и тангажу осуществляется без крена двумя парами рулей (канал I и II). Каждый канал обеспечивает создание такой управляющей силы, что их равнодействующая по величине и направлению постоянно соответствует принятому методу наведения ракеты на цель. Стабилизация ракеты по крену обеспечивается отклонением четырех элеронов, расположенных на консолях крыльев (канал III).
Для улучшения маневренности ракеты МП с пассивной радиолокационной головкой самонаведения и увеличения располагаемых перегрузок на малых скоростях в носовой части корпуса перед рулями (рис. I.I) устанавливаются дестабилизаторы.
Подвеску ракеты на самолет производят на штатное пусковое устройство типа АПУ-68. Количество подвешиваемых ракет в зависимости от типа самолета составляет от двух до четырех.
1.2. СИСТЕМЫ НАВЕДЕНИЯ РАКЕТ
Лазерная полуактивная система наведения
На самолете устанавливается лазерная станция подсвета цели (ЛСПЦ), основным элементом которой является оптический квантовый генератор. Летчик, выполняя прицеливание, наводит подвижную марку (перекрестие) оптико-прицельной системы (ОПС) на цель и удерживает ее на ней в течение всего времени атаки. С помощью следящей системы целеуказание от визирного устройства ОПС передается одновременно на подвижное зеркало ЛСПЦ, направляя лазерный луч на цель, и на ЛГСН ракеты, подвешенной на этом же самолете, для поворота координатора на цель. После захвата ЛГСН сигнала, отраженного от цели, производится пуск ракеты. Ракета наводится на пятно лазерного луча, при этом осуществляется программный маневр в вертикальной плоскости (вертикальная горка (ВГ)). По решению летчика маневр ВГ может быть отключен перед пуском ракеты.
Типовая траектория ракеты в вертикальной плоскости показана на рис. 1.2. Она формируется законом управления, который для повышения боевой эффективности обеспечивает подход ракеты к цели под углами свыше 15° к горизонту. Траектория имеет четыре характерных участка.

Рис. 1.2. Типовая траектория ракет МЛ, МП
После отделения ракеты в течение секунды осуществляется отработка стартовых возмущений и стабилизация ракеты относительно центра масс. Траектория полета ракеты имеет характер, близкий к прямолинейному (участок I).
В момент t (упр) (участок II) в систему управления ракетой подается сигнал j (в.зад) = -27°, которым создается вертикальный маневр-кабрирование. При выполнении условия
De(t)=Deзад(t)
где Deзад(t) определяется путем интегрирования постоянного сигнала
угловой скорости визирования DW(в.зад)=const в системе управления
снимается сигнал j(в.зад)=-27° и ракета переходит в режим разворота на пикирование (участок III). Длительность участка III около 2 с.
При достижении условия j(в) = -1° (участок IV) включается режим ближнего самонаведения (t(бс)). который продолжается до встречи ракеты с целью. Управление ракетой на этом участке осуществляется по сигналам головки самонаведения: угловой скорости линии- визирования и угла пеленга цели.
Следует отметить, что хотя ручной или полуавтоматический подсвет цели должен продолжаться до конца наведения ракет, носитель имеет возможность маневрировать в пределах углов отклонения системы целеуказания, чтобы уменьшить вероятность его поражения средствами ПВО атакуемого объекта.
Радиолокационная пассивная система наведения
Пассивная радиолокационная ГСН ракеты захватывает излучение РЛС на подвеске в диапазоне частот, заданном перед вылетом по предварительным данным радиоразведки. Поиск по углу осуществляется либо обзорным режимом работы пассивной РГС - прокачкой подвижной антенны в заданном диапазоне углов по тангажу и курсу, либо расширением поля зрения пассивной РГС с неподвижной антенной (что менее эффективно). После обнаружения и захвата цели пеленг j передается в вычислитель носителя, где определяется дальность до цели. Когда текущая дальность станет меньше баллистической дальности полета ракеты при данных условиях полета носителя (введенных в вычислитель высоты и скорости полета), дается разрешение на пуск ракеты.
После пуска самолет-носитель может совершать маневр ухода от цели, а ракета автономно наводится на цель. При этом осуществляется программный маневр ракеты в вертикальной плоскости ("горка"), увеличивающий дальность полета и повышающий эффективность поражения цели из-за увеличения углов подхода (13... 60°). Типовая траектория полета ракеты в вертикальной плоскости такая же, как и у ракеты МЛ (рис. 1.2). Отличие лишь в длительности второго участка, так как при пуске с больших дальностей угловая скорость линии визирования W(в.) мала и угол De(t) растет медленно, поэтому» если условие (I.I) не выполняется в течение 9 с, то угол De(t) принимается постоянным и равным минус 27°. Дальность пуска при этом достигает 30...40 км.
Радиокомандная система наведения
Наведение ракеты на цель производится по методу трех точек. При этом методе ракета постоянно удерживается на линии носитель-цель, тем самым выполняется равенство углов визирования цели и ракеты. Существуют две системы радиокомандного наведения; ручная и полуавтоматическая [3]. Наиболее простая - ручная - не требует для наведения прицельно-визирных устройств.
В состав системы входят рукоятка управления и передатчик команд (на носителе), приемник команд и автопилот (на ракете). На одноместном самолете команды формирует летчик, пользуясь книппелем - кнопкой на рукоятке управления самолетом. Кнопка имеет две степени свободы: летчик может перемещать ее вверх-вниз и вправо-влево. Перемещение кнопки фиксируется потенциометрами или тензодатчиками, сигнал которых и является первичной командой. Выработанная команда поступает в передатчик, где она фильтруется, зашифровывается и в виде кода передается через направленную антенну на ракету. Приемник ракеты принимает команды, дешифрует их и подает на вход автопилота, с помощью которого команды отрабатываются ракетой. Задача оператора (летчика) - передавать команды управления на ракету, удерживающие ее на линии самолет-цель. Это достигается, если оператор видит ракету все время совмещенной с целью. Чтобы оператор без затруднений мог видеть удаляющуюся ракету и ее реакцию на управление, на ней устанавливают трассер, который воспламеняется после старта и ярко горит, обеспечивая хорошую видимость ракеты на всей траектории ее полета.

Рис. 1.3. Типовая траектория МР: С1, С2 ,С3,С4 - траектория самолета;
p1, p2, р3 - траектория ракеты
После пуска ракеты в процессе ее наведения самолет может пикировать на цель следом за ракетой, продолжать горизонтальный полет или маневрировать таким образом, чтобы оператор не терял из поля зрения ракету и цель, а ракета, находящаяся на линии визирования цели, не выходила за пределы диаграммы направленности передатчика радиокоманд. Типовая траектория ракеты в вертикальной плоскости показана на рис. 1.3.
Глава 2. КОНСТРУКЦИЯ РАКЕТЫ
2.1. КОМПОНОВКА РАКЕТЫ
По конструктивным и технологическим соображениям ракета выполнена из шести отдельных отсеков (см. рис. I.I).
Отсек I представляет собой головную часть ракеты и имеет форму в зависимости от установленного в ней оборудования:
на ракете МЛ устанавливается полуактивный лазерный координатор цели. Он имеет форму усеченного конуса, сужающаяся часть которого оканчивается сферическим прозрачным обтекателем. Между вторым отсеком и лазерным координатором цели устанавливается цилиндрическая проставка, внутри которой располагается блок задержки (БЗ);
на ракете МП устанавливается радиолокационная головка самонаведения. Она располагается в цилиндрическом корпусе, на внешней поверхности которого крепятся дестабилизаторы. Передняя часть отсека закрыта коническим радиопрозрачным обтекателем;
на ракете МР устанавливается обтекатель оживальной формы, внутри которого расположены преобразователь напряжения и регулятор частоты.
Отсек I стыкуется с отсеком 2 с помощью четырех шпилек.
Корпус отсека 2 выполнен из литого магниевого сплава, наружная поверхность которого имеет оживальную форму. Для соединения с отсеком I в передней части корпуса отсека 2 отлиты четыре кармана для установки гаек на стыковочные шпильки отсека I. Карманы с помощью винтов закрываются крышками. Внутри корпуса установлены: два привода рулей ПГ-11, блок формирования команд управления (БФКУ), блок управления (БУ), три контактных датчика Б-24, два пневмомеханических арретира рулей. В передней части отсека установлены две пары рулей, оси которых тягами соединены с цилиндрами приводов. Оси рулей установлены в гнездах на подшипниках, закрытыми снаружи крышками, которые крепятся к корпусу винтами. В верхней части корпуса двумя винтами крепится предохранительный механизм, шток которого во взведенном состоянии выходит из корпуса отсека и в этом положении удерживается вставленной чекой.
В нижней части корпуса имеется окно для ниши, в которую устанавливают электроразъем и пневмоштуцер, обеспечивающих соединение пневмопроводов и электроцепей отсека 2 с отсеками 5 и 6.
С левой стороны на корпусе установлена колодка-переключатель со стрелкой и надписью "НП" (направление полета).
Стыковка отсека 2 с отсеком 3 осуществляется шпильками, установленными в отсеке 2, и гайками.
Отсек 3 представляет собой фугасную боевую часть ракеты. В передней коробке отсека установлен предохранительно-исполнительный механизм (ПИМ). Отсек 3 стыкуется с отсеком 4 восьмью шпильками и гайками.
Отсек 4 представляет собой ракетный двигатель твердого топлива (РДТТ). На наружной поверхности отсека закреплены передний и два задних узла (бугеля) подвески ракеты на пусковое устройство, четыре кронштейна передних узлов крепления консолей крыла и два контакта запуска двигателя, которые соединены с пиропатроном запуска, установленным в переднем днище двигателя. С отсеком 5 двигатель стыкуется восьмью шпильками, ввинченными в крышку двигателя.
Отсек 5 представляет собой энергетический отсек. Корпус отсека состоит из каркаса и обтекателя.
Каркас отсека отлит из алюминиевого сплава. Внутри корпуса предусмотрены посадочные места (приливы, бобышки), на которых устанавливаются: ампульная батарея (АБ), блок питания (БП), пневмоблок, привод элеронов ПГ-10, бортразъем и разъем безопасности.
В передней части корпуса установлена на осях качалка, связанная рычагом со штоком рулевого привода. Качалка с помощью рычагов, тяг и поводков передает движение от привода ко всем четырем элеронам, .расположенным на крыльях ракеты.
Снаружи отсека запрессованы четыре штыря, являющиеся основными узлами крепления крыльев. Вспомогательные точки крепления крыльев в форме штифтов располагаются в задней части каркаса.
По бокам отсека установлены обтекатели сопловых блоков, для контровки которых предусмотрены отверстия, закрытые заглушками,
Обтекатель отсека представляет собой сварную конструкцию из алюминиевого сплава, состоящую из тонкостенной обшивки и двух шпангоутов. На переднем шпангоуте для стыковки с каркасом установлены анкерные гайки. На обшивке обтекателя винтами закреплены две теплозащитные накладки, одновременно выполняющие роль крышек люков для доступа к оборудованию.
Отсек 6 представляет собой хвостовую часть ракеты, его Форма зависит от типа ракеты:
на ракетах МП и МЛ устанавливается легкий полусферический обтекатель, на шпангоуте которого имеются анкерные гайки для стыковки с отсеком 5;
на ракете МР устанавливается обтекатель, представляющий несущую конструкцию, внутри которой размещена приемная часть аппаратуры радиокомандного наведения. На боковой поверхности отсека имеются лючки для доступа к аппаратуре. Снаружи отсека, снизу, установлен на специальной подвеске трассер Т-60. Обтекатель соединяется с отсеком 5 телескопическим стыком.
2.2. СИСТЕМА УПРАВЛЕНИЯ РАКЕТОЙ
Состав и назначение
В состав системы управления ракетой (СУР) входят блок формирования команд управления (БФКУ), блок управления (БУ), два нулевых привода ПГ-11 и один рулевой привод ПГ-10.
БЖУ - литой корпус из алюминия с армированными металлическими втулками, внутри которого находится датчик угла тангажа ДУТ и электронная схема, расположенная на двусторонних печатных платах. Корпус с двух сторон закрыт герметично металлическими крышками с резиновыми прокладками. БФКУ формирует траекторию ракеты в зависимости от начальных условий пуска и сигналов управления от ГСН (на ракетах МЛ и МП) или аппаратуры радиокомандного наведения (на ракете МР).
БУ - литой корпус из алюминиевого сплава, представляющий собой круглое основание с четырьмя бобышками для крепления к ракете. С одной стороны основания установлены чувствительные элементы (два датчика линейных ускорений (ДЛУ), три датчика угловых ускорений (ДУУ) и датчик угла крена (ДУК) с другой стороны - две односторонних печатных платы, предназначенных для преобразования и усиления мощности сигналов, идущих на рулевые приводы. Основание БУ с двух сторон закрыто металлическими колпаками с резиновыми уплотнительными кольцами.
В корпусах БЖУ и БУ предусмотрены отверстия, чтобы регулировать подстроечные резисторы электронных схем. Для герметизации блоков отверстия закрыты резиновыми заглушками.
Рулевые приводы ПГ-11 предназначены для поворота рулей ракеты по I и II каналам. Эти каналы предназначены для стабилизации и управления ракетой по курсу и тангажу. В основу управления каналами положена статическая двухконтурная система стабилизации с использованием сигналов датчиков ДУУ и ДЛУ.
|
Рулевой привод ПГ-10 предназначен для поворота элеронов в канале III, решающем задачу стабилизации ракеты по крену. Канал стабилизации угла крена ракеты имеет также два контура, в которых использованы сигналы ДУУ и ДУК.
Конструкция рулевых приводов ПГ-11 и ПГ-10 рассмотрена в разд. 2.2, с. 17.
Система управления ракетой обеспечивает;
стабилизацию ракеты относительно центра масс по трем осям связанной с ракетой системы координат;
управление ракетой на траектории по сигналам наведения;
безопасность старта ракеты с самолета-носителя и окончание переходных процессов от стартовых возмущений к началу управления по сигналам наведения;
выполнение ракетой маневра "вертикальная горка" для увеличения угла подхода ракеты к цели;
программное ограничение перегрузки ракеты.
Чувствительные элементы
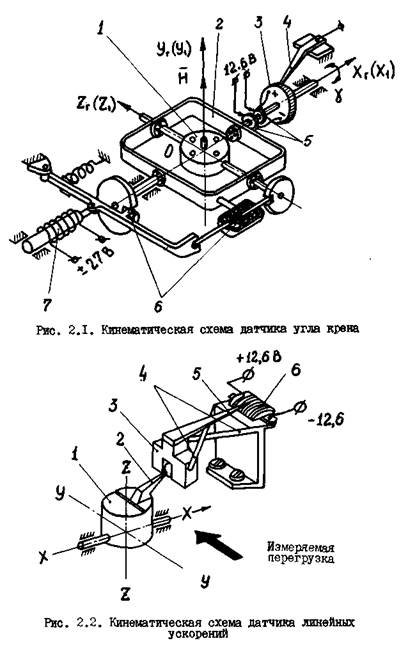
Датчик угла крена ДУК (тангажа ДУТ) предназначен для измерения соответствующих углов при полете ракеты. Он представляет собой трехстепенной свободный гироскоп, к внешней рамке 2 которого прикреплен потенциометр 3 (рис. 2.1). При повороте ракеты вместе с корпусом датчика относительно оси ОХ1 на угол крена g ось гироскопа ОУГ сохраняет свое положение в инерционном пространстве, а плоскость внешней рамки 2 остается перпендикулярной оси вращения ротора I. Таким образом щетка токосъемника 4, установленная на корпусе датчика, повернется относительно потенциометра 3 на угол равный углу крена ракеты.
Питание потенциометра 3 осуществляется через коллекторные кольца 5. Для обеспечения определенного взаимного положения рамок гироскопа перед началом работы предусмотрен механизм арретирования 6, приводимый в действие штоком электромагнита 7.
Датчик линейных ускорений ДЛУ выдает сигнал, пропорциональный перегрузке. Кинематическая схема датчика приведена на рис. 2.2. Чувствительным элементом ДЛУ является масса I, не сбалансированная относительно оси подвеса XX . На массе закреплен рычаг 2 с шариком поводковой передачи, входящим в паз поводка 3. Поводок через пластинчатые пружины 4 соединен с корпусом, на котором закреплен потенциометр 6. На поводке установлен щеточный контакт 5 для снятия сигнала. Датчик имеет арретирующее устройство, предотвращающее перемещение щетки по потенциометру.
Датчик угловых ускорений ДУУ предназначен для измерения углового ускорения ракеты относительно какой-либо ее оси. Кинематическая схема ДУУ приведена на рис. 2.3. Чувствительным элементом ДУУ является двухстепенной гироскоп I, связанный через поводковую передачу 6 с индуктором. Индуктор выполняет функции узла съема сигнала, демпфера и узла силовой обратной связи. Индуктор представляет собой электромагнитную систему и состоит из пермаллоевого магнитопровода 4 с двумя встроенными в него постоянными магнитами 3, пермаллоевого ротора 5 и двух сигнальных катушек 2.

Рис. 2.3.Кинематическая схема датчика углового ускорения
В среднем положении рамку гироскопа удерживает магнитная пружина, создаваемая потоками подмагничивания (образованы постоянными магнитами), которые, замыкаясь, через концевые части ротора, устанавливают его в положение максимальной проводимости, т.е. в среднем положении. При вращении ракеты вокруг оси ZZ возникает гироскопический момент, отклоняющий рамку гироскопа и ротор индуктора

|
от нейтрального положения до тех пор, пока он не уравновесится моментом магнитной пружины. При движении ротора индуктора в магнитном поле постоянных магнитов происходит перераспределение магнитных потоков и в сигнальной обмотке наводится напряжение, пропорциональное угловому ускорению ракеты. Демпфирование движения ротора индуктора осуществляется путем взаимодействия токов, наводимых в роторе, о магнитным полем постоянного магнита.
Рулевой привод
Рулевой привод в каждом канале СУР выполнен в виде единого рулевого агрегата и состоит из газового распределителя г силового цилиндра. Привод ПГ-11 отличается от привода ПГ-10 лишь тяговым усилием на штоке.
Газовый распределитель состоит из газового тракта и электромагнитной системы (рис. 2.4). Газовый тракт включает в себя входной фланец 4, ниппель 3, сопло I, закрепленное на оси ротора 2, и приемник 9, через отверстия которого газ попадает в полости силового цилиндра.
Электромагнитная система конструктивным исполнением корпуса 5 отделена от газового тракта и состоит из двух постоянных магнитов, магнитопровода 6 и ротора 7, размещенного во внутренних окнах двух катушек 8.
Силовой цилиндр - полый цилиндр 10 из алюминиевого сплава, внутри которого перемещается поршень 15, закрепленный на трубке 14. Внутри трубки шарнирно поворачивается штанга 13. Цилиндр с одной стороны закрыт крышкой 16, на которой расположены выключатель 18 и потенциометр 21. Электрическая часть закрыта кожухом 19. Выключатель выполнен из бронзового стержня с посеребренной рабочей поверхностью, заармированный в пресс-материал.
Для съема электрического сигнала служат контактные пластины 20, закрепленные на токосъемнике 17. Уплотнение всех подвижных соединений в силовом цилиндре создается резиновыми манжетами II. На конце штанги, выходящей из цилиндра, установлена вилка 12. Выход электрических цепей оформлен жгутом (на рис. 2.4 не показано). Корпус силового цилиндра крепят неподвижно на плате ракеты с помощью резьбового соединения.
Сжатый воздух под давлением 1,4 МПа, выходящий из струйной трубки I, распределяется между двумя входными отверстиями приемника 9. Области перекрытия выходного отверстия струйной трубки с входными отверстиями каналов цилиндра образуют входные дроссели S11 и S12 , а незатененные струйной трубкой площади приемных окон - выходные дроссели S21 и S22. Рассмотрим работу привода, функциональная схема которого приведена на рис. 2.5.
При отсутствии электрического сигнала с усилителя мощности (УМ) магнитный поток, создаваемый обмотками катушек 13, равен нулю. Создаваемые постоянными магнитами 2 потоки подмагничивания, замыкаясь, через концевые части ротора I устанавливают его в положение максимальной проводимости, т.е. в среднее положение (j(р)=0). Другими словами, ротор удерживается в среднем положении магнитной пружиной, создаваемой постоянными магнитами. Струйная трубка 4 жестко закреплена на оси 3 ротора, поэтому угол поворота струйной трубки тоже равен нулю (j(тр)=0). В этом случае равны площади входных дросселей (S11 = S12 ) и площади выходных дросселей (S21 и S22). Следовательно, через входные дроссели в полости I и II цилиндра поступают в единицу времени одинаковые количества сжатого воздуха, а через выходные дроссели из этих полостей выходят в единицу времени одинаковые количества сжатого воздуха. Поэтому давления воздуха p1 и р2 в полостях равны (р1=p2). На поршень 8, разделяющий цилиндр, действуют с противоположных сторон одинаковые силы давления воздуха, поэтому поршень неподвижен.
При наличии сигнала с усилителя мощности u(оу)¹0 в катушках 13 создаются магнитные потоки, направленные в одну сторону, так как они подключены параллельно. Магнитные потоки складываются с магнитными потоками постоянных магнитов 2 в одной части зазора и вычитаются в другой. В результате создается электромагнитный момент, под действием которого ротор начинает поворачиваться. При равенстве момента, создаваемого катушками ротора, моменту сопротивления магнитной пружины, поворот ротора прекратится. Угол поворота ротора будет пропорционален управляющему сигналу u(оу).

|
Пусть полярность сигнала u(оу) такова, что поворот струйной трубки происходит вправо, как показано на рис. 2.5. В этом случае увеличится площадь правого входного дросселя S12 и уменьшится площадь левого входного дросселя S11 , а также уменьшится площадь правого выходного дросселя S22, и увеличится площадь левого выходного дросселя. В результате увеличится количество воздуха, поступающего в полость II, и уменьшится количество воздуха, выходящего в единицу времени из этой полости, и, наоборот, уменьшится количество воздуха, поступающего в единицу времени в полость I и увеличится количество, выходящего в единицу времени из этой полости. Поэтому давление воздуха р2 в полости II возрастет, а давление воздуха p1 в полости I падает (p2>p1). Под действием силы, возникающей от разности давлений воздуха на поршень, он начнет перемещаться влево, т.е. в сторону, противоположную движению торца струйной трубки 4.
Перемещение поршня через трубку 5, штангу 6, вилку 7 вызывает отклонение рулей (ПГ-11) или элеронов (ПГ-10). Движение штока 9 приводит к размыканию цепи выключателя 10, сигнализирующего о нейтральном положении руля (U(нп)), а также к движению токосъемника II по потенциометру 12. Сигнал с потенциометра u(ос) ос подается на вход суммирующего усилителя (СУ) в полярности противоположной к входному. Шток будет перемещаться, пока сигнал с потенциометра не скомпенсирует входной сигнал (u(ос)= u(вх)). В этом случае выходной сигнал с усилителя мощности становится равным нулю (u(оу) = 0). Ротор электромеханического преобразователя вместе со струйной трубкой возвращаются в нейтральное положение (j(р)=j(тр)= 0). Давление в полостях цилиндра выравнивается (р1=р2) и поршень останавливается. Перемещение руля будет пропорциональным управляющему сигналу u(вх), подаваемому из системы управления ракетой.
При наличии шарнирного момента (Мш ¹ 0), что имеет место при отклонении руля в реальном полете ракеты, привод работает так же, как описано выше. Однако в этом случае в процессе движения поршня от среднего положения на него будет действовать сила сопротивления, пропорциональная шарнирному моменту руля. Следовательно, поршень остановится тогда, когда сила, развиваемая поршнем за счет разности давлений р1-р2 полостях цилиндра, станет равной силе сопротивления, создаваемой шарнирным моментом на руле. Ротор и струйная трубка установятся от нейтрального положения под углом j, пропорциональным сигналу с усилителя мощности u(оу)=u(вх)-u(ос)
2.3. БОЕВАЯ ЧАСТЬ
фугасная боевая часть (ФЕЯ) предназначена для поражения малоразмерных тактических целей. На рис. 2.6 показана фугасная боевая часть с активной оболочкой.
Корпус ФБЧ представляет собой цилиндрическую обечайку 5, сваренную с двумя шпангоутами I и 9. Внутри цилиндрической обечайки размещена сварная коническая обечайка 6, заполненная взрывчатым составом 7. Объем между обечайками заполняется алюминиевым порошком, образующим активную оболочку 8.
Для размещения ПИМа 3 в передний шпангоут вварена коробка 2. Шашка дополнительного детонатора 4 вставлена в стакан и поджата гайкой.
Для наполнения корпуса взрывчатым составом предусмотрена горловина, которая закрыта крышкой 10 с прокладкой. Для наполнения ФБЧ алюминиевым порошком имеются четыре отверстия с крышками 12.
К обечайке приварены кронштейны II, на которых крепят обтекатель ракеты. Для стыковки ФБЧ с отсеками 2 и 4 в переднем шпангоуте имеется восемь отверстий, а в заднем - восемь шпилек.
При встрече ракеты с преградой срабатывают контактные датчики, электрический сигнал которых подается на электрозапал ПИМ. От детонирующего импульса ПИМ через промежуточный детонатор подрывается заряд ВВ. Активная оболочка, сгорая при взрыве, выделяет большое количество тепла, что значительно повышает фугасность действия БЧ. Дополнительно к этому образующиеся при окислении алюминия раскаленные твердые шлаки повышают пламенность взрыва и его зажигательное действие.
2.4. ДВИГАТЕЛЬ
Двигатель ракеты предназначен для обеспечения старта ракеты с самолета-носителя и полета ее со скоростью, необходимой для выполнения тактической задачи. Наибольшее применение на ракетах малой и средней дальности получили ракетные двигатели твердого топлива (РДТТ).
РДТТ (рис. 2.7) состоит из неснаряженного двигателя, заряда смесевого топлива 8, воспламенителя 7 и пиропатрона I.
Неснаряженный двигатель состоит из следующих основных узлов и деталей: корпуса 9, штуцера 25, крышки 13 и двух сопловых блоков 14. Корпус, штуцер и крышка образуют камеру сгорания.
Корпус 9 представляет собой металлическую сварную конструкцию из высокопрочной стали. К внутренней поверхности корпуса, с торцов, приклеены детали из теплоизоляционных материалов в виде манжет, полусферы, воротника; на цилиндрическую часть нанесен теплоизоляционный состав. В шпангоуте корпуса выполнено резьбовое гнездо для установки штуцера 25. Для проведения стыковочных операций с отсеком 3 в шпангоуте предусмотрены окна, закрытые лючками 3, на торце - восемь отверстий и (фиксирующий штифт. Сверху, на цилиндрической части шпангоута 6, установлены бугель 5 - передний узел подвески ракеты и два контакта 4. К утолщенной части цилиндра корпуса
|
из
5.00
|
Обсуждение в статье: КЛАССА «ВОЗДУХ-ПОВЕРХНОСТЬ» |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы