 |
Главная |


Порядок выполнения работы. Рассмотрим процедуру разработки программы для ПЛК на примере модели системы
|
из
5.00
|
Рассмотрим процедуру разработки программы для ПЛК на примере модели системы управления стеклоочистителями и светом фар автомобиля. Эта процедура включает в себя несколько этапов:
1) Создание и отладка Simulink-модели управляемого процесса. Подготовьте модель, разработанную в предыдущей лабораторной работе (см. рис. 8.1).

Рис. 8.1. Simulink-модель
2) Генерация кода для ПЛК. Нажмите правой кнопкой мыши на SF-диаграмму и выберите PLC Coder/Options.
Появиться окно Configuration Parametrs, представленное на рис. 8.2.

Рис. 8.2. Окно Configuration Parametrs
В строке Target IDE выберите Generic и нажмите на кнопку Generate code...
3) Отладка кода для ПЛК. Откройте созданный файл (см. рис. 8.3). Файл находится в папке plcsrc (по умолчанию), которая в свою очередь находится в текущей рабочей папке.

Рис. 8.3. Сгенерированный файл
4) Откройте программу OpenPCS. Создайте новый проект (см. рис. 8.4). Для создания нового проекта необходимо нажать на вкладку File/New. В окне File Type выберите Projects. В строке Name введите имя проекта и нажмите на кнопку OK.

Рис. 8.4. Создание нового проекта
5) Создайте файл ST (см. рис. 8.5). Для создания нового файла необходимо нажать на вкладку File/New. В окне File Type выберите POU. В окне IEC Language выберите ST. В строке Name введите имя файла и нажмите на кнопку OK.

Рис. 8.5. Создание нового файла ST
6) Скопируйте все переменные из файла, сгенерированного в MATLAB, в OpenPCS (все переменные должны находится в общем разделе переменных VAR), присвойте входным и выходным переменным фактические адреса (см. рис. 8.6). Глобальные постоянные объявлены и проинициализированы в блоке VAR_GLOBAL CONSTANT.
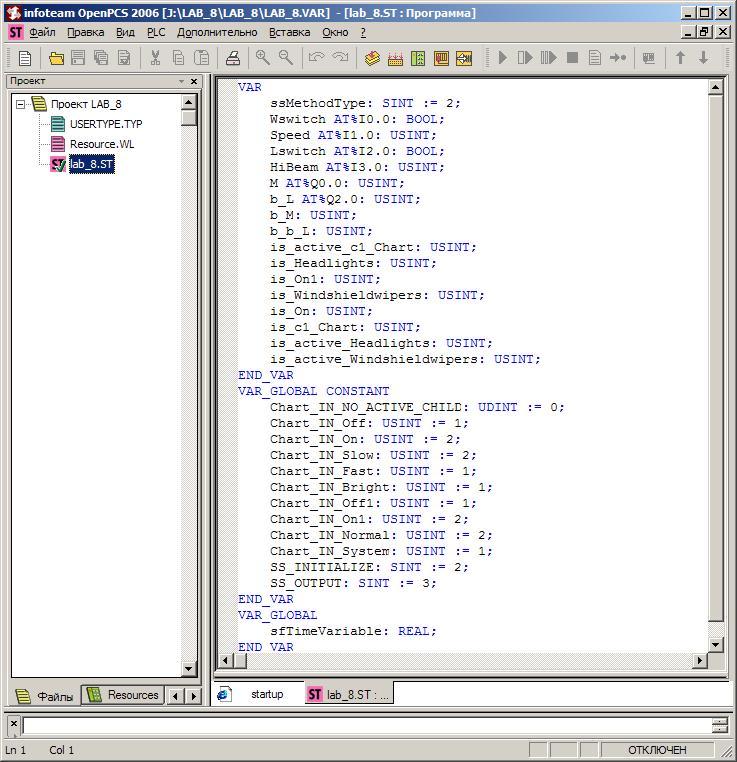
Рис. 8.6. Окно OpenPCS (раздел переменных)
7) Далее скопируйте текст программы в раздел программного кода OpenPCS (см. рис. 8.7). В тексте программы в операторах CASE…OF замените все метки их соответствующими числовыми значениями, представленными в блоке VAR_GLOBAL CONSTANT. Проверьте программу на отсутствие ошибок с помощью пункта меню Файл/Проверить синтаксис. При возникновении ошибок в OpenPCS проверьте типы и значения переменных, при необходимости замените их.
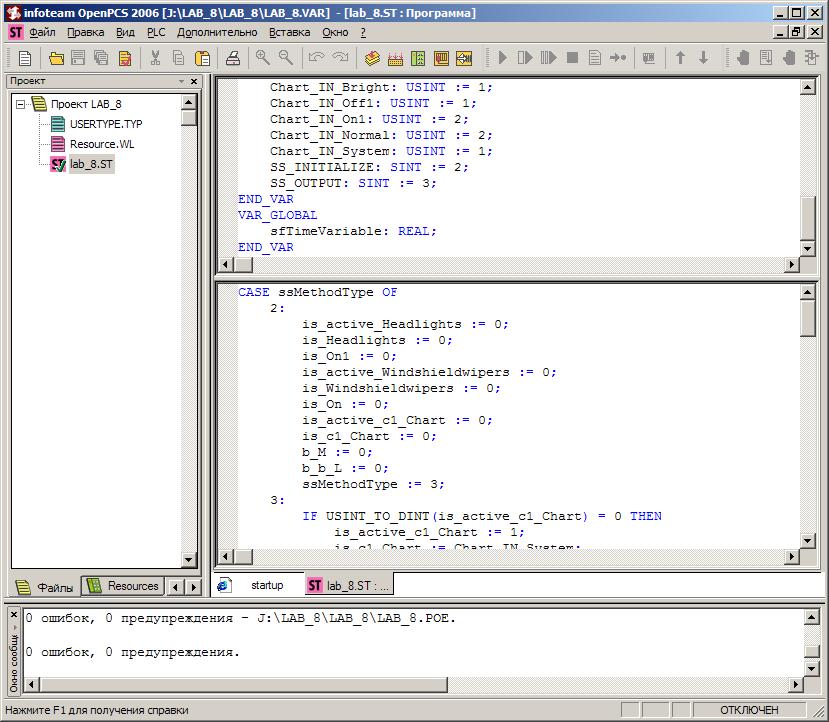
Рис. 8.7. Окно OpenPCS (разделы переменных и программного кода)
На данном этапе процедура разработки программы для ПЛК заканчивается.
8) Подготовьте полученную программу к выполнению с помощью встроенного в OpenPCS симулятора. Для этого последовательно нажмите на кнопки “Собрать активный ресурс” и “Подключиться/Отключиться” (см. рис. 8.8 и 8.9)
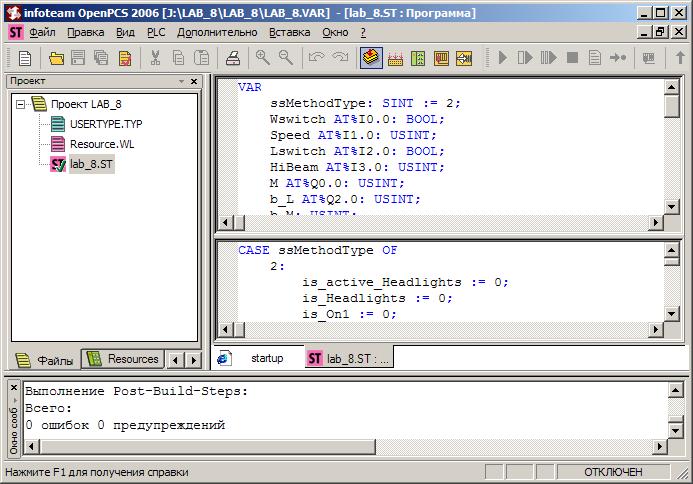
Рис. 8.8. Создание активного ресурса
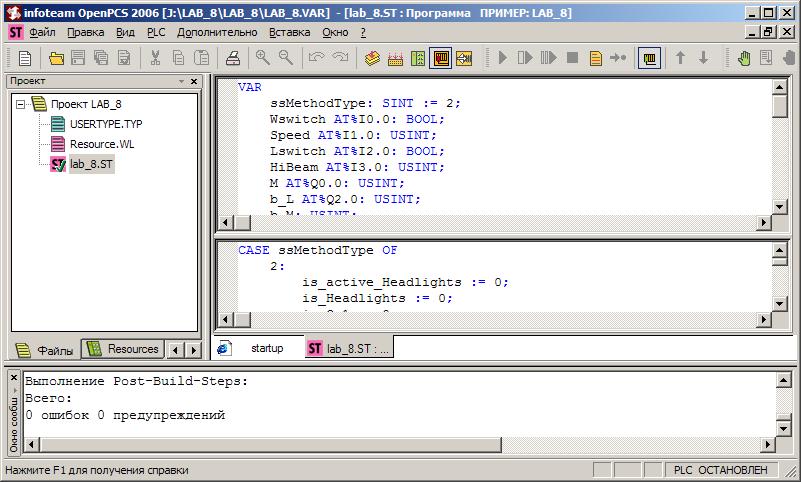
Рис. 8.9. Выполнение операции Подключиться/Отключиться
9) Сформируйте список отлаживаемых переменных. Для этого откройте вкладку Resources в левом нижнем поле Проекта и выберите необходимые переменные, как это показано на рис. 8.10.

Рис. 8.10. Формирование списка отлаживаемых переменных
10) Запустите программу на выполнение с помощью встроенного симулятора SmartSIM (кнопка run), окно которого представлено на рис. 8.11. Проконтролируйте правильность работы программы, изменяя значения входных переменных и наблюдая за соответствующими им изменениями значений выходных сигналов.

Рис. 8.11. Окно симулятора SmartSIM
11) Закончите работу.
8.3. Контрольные вопросы
1. Как называется модуль, с помощью которого можно сгенерировать программный код для ПЛК в MATLAB?
2. Как называется стандарт, которому соответствует сгенерированный код?
3. Какими основными свойствами обладает Simulink PLC Coder?
4. Каковы преимущества разработки программ для ПЛК с использованием пакета MATLAB?
5. В каком формате генерируется программный код для ПЛК?
6. Какие основные операции следует выполнить с программным кодом, полученным с помощью Simulink PLC Coder, чтобы избежать возможных ошибок при его отладке в среде OpenPCS?
Список литературы
1. Методические указания к лабораторным работам по дисциплине «Компьютерные технологии управления в технических системах» / Сост.: Е. С. Анушина, А. В. Никоза, В. В. Степанов, Д. М. Филатов. СПб.: Изд-во СПбГЭТУ “ЛЭТИ”, 2011. 24 с.
2. Моделирование гибридных систем в Stateflow. Методические указания к лабораторной работе по курсу «Моделирование систем» / Cамар. гос. техн. ун-т; Сост. Рогачев Г. Н. Самара, 2005. 11 с.
3. Г. Н. Рогачев “Stateflow 5. Руководство пользователя”. Ссылка на Internet-ресурс: http://matlab.exponenta.ru/stateflow/book1/index.php
4. Основы разработки систем диспетчерского контроля и управления: Методические указания к лабораторным работам по дисциплине “Проектирование автоматизированных производственных комплексов и систем” / Сост.: Е. С. Филатова, Д. М. Филатов. СПб.: Изд-во СПбГЭТУ “ЛЭТИ”, 2013. 36 с.
Содержание
|
из
5.00
|
Обсуждение в статье: Порядок выполнения работы. Рассмотрим процедуру разработки программы для ПЛК на примере модели системы |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы