 |
Главная |


Аппаратура управления и проверки
|
из
5.00
|
1.2.10.1 АУП формирует запросы значений параметров сигналов из АКО и АКУП, траслирует информацию о сигналах и общем состоянии радиомаяка на АДУ и КПУ, а так же получает от них команды управления радиомаяком и изменения параметров его сигналов. Кроме того АУП управляет переключателями тракта ВЧ и ВИП, принимает и обрабатывает информацию от датчиков шкафа и аппаратной.
1.2.10.2 В состав АУП входит процессор управления ПУ (А13) АИЦТ.468332.007. Программы управления радиомаяком хранятся в ПЗУ процессора управления.
1.2.10.3 АУП предусмотрены два режима управления радиомаяком: местное и дистанционное. Режим управления задается тумблером “Мупр/ДУ” на лицевой панели ПУ.
1.2.10.4 В местном режиме команды управления вводятся непосредственно кнопками ПУ (Вкл1,2/Отл) или с клавиатуры ПК из состава КПУ, подключаемого к разъему
“RS–232” ПУ через нуль-модемный кабель (по последовательному каналу RS-232). Кнопками ПУ можно ввести только команды включения или отключения маяка.
1.2.10.5 В режиме дистанционного управления команды передаются в ПУ по линии ТУ–ТС с клавиатуры аппаратуры ДУ или с КПУ.
ВНИМАНИЕ. Ввод команд управления с АДУ возможен только в дистанционном режиме управления.
1.2.10.6 Команду на переключение антенных переключателей тракта ВЧ (с рабочего комплекта на резервный) АУП получает или с АКО1,2 (при аварии рабочего комплекта) или с АДУ (КПУ).
1.2.10.7 На на лицевой панели ПУ, для отображения информации общего состояния радиомаяка, размещены единичные индикаторы с красным, желтым и зеленым свечением “Авария”, “Ухудш”, “Норма”, “Работа 1’’, “Работа 2’’, “ДУ’’, “Норма ДУ’’, “Мупр’’.
Информацию о состоянии сетей (основной и резервной), АБ, ЗО, перегреве аппаратной ПУ получает по каналу RS–232 от АКУП для последующей трансляции на АДУ и КПУ.
1.2.10.8 К ПУ подключены датчики аппаратной и шкафа ВСКРЫТИЕ, ДЫМ, ПЕРЕГРЕВ для последующей трансляции этой информации на АДУ и КПУ.
1.2.10.9 ПУ встроенным таймером (часы/календарь) осуществляет вычисление наработки маяка, значение которой хранится в энергонезависимой памяти таймера ПУ.
1.2.10.10 Процессор управления предназначен для управления радиомаяком и индикации его состояния по заданной программе. Функциональная схема процессора управления приведена на рисунке 23.
1.2.10.11 Программы управления аппаратурой радиомаяка хранятся в ПЗУ ПУ.
1.2.10.12 ПУ представляет собой микро-ЭВМ, выполненную на базе микропроцессора типа 1821ВМ85А. Процессор имеет фиксированную систему команд, включающую команды пересылки, арифметические, логические, сдвига, условных и безусловных переходов, прерываний.
Разрядность шины данных — 8, шины адреса — 16.
Процессор имеет встроенный генератор тактовой частоты. Выходной сигнал “Такт” имеет частоту, в два раза меньшую частоты кварцевого резонатора 4915,2 кГц.
Процессор имеет мультиплексную шину данных и адреса AD0...AD7. Через буфер шины данных (ШД) осуществляется прием и передача данных. Управление направлением передачи выполняется сигналом RD (чтение).
Регистр адреса фиксирует 16-ти разрядный адрес, формируемый процессором, по заднему фронту положительного сигнала ALE. Через буфер шины адреса (ША) адрес выдается на внешние устройства.
Формирователь сигналов управления и буфер шины управления (ШУ) формирует сигналы управления процессора при обращении к памяти или к внешним устройствам.
Постоянное запоминающее устройство (ПЗУ) имеет емкость до 32К´8 и адреса памяти от 0000Н до 7FFFН. Оперативное запоминающее устройство (ОЗУ) статического типа имеет емкость 32К´8 и адресацию от 8000Н до FFFFН. Выбор ОЗУ или ПЗУ выполняется сигналами с дешифратора адреса памяти по разряду адреса А15 при наличии низкого уровня сигнала –M/IO (память/внешние устройства). При высоком уровне этого сигнала выбираются внешние устройства с помощью дешифратора адреса ВУ. Внешние устройства адресуются разрядами адреса А3…А7. Дешифратор адреса ВУ стробируется сигналами –RD, –WR. Выходные сигналы дешифратора адреса ВУ подаются на устройства ПУ, подключенные к шине процессора как внешние устройства.
В качестве ОЗУ применяется микросхема STK15C88, имеющая две области памяти по 32 Кбайта. Одна область используется как оперативная память и с ней работает процессор. Вторая область используется как энергонезависимая память. При включении питания содержимое энергонезависимой памяти переписывается в оперативную память. При выключении питания содержимое оперативной памяти сохраняется в энергонезависимой памяти.
Время перезаписи из оперативной памяти в энергонезависимую память в пределах 10 мс. При этом напряжение питания на микросхеме должно удерживаться электролитическим конденсатором в пределах 3,6…4,3 В.
1.2.10.13 Порт управления обеспечивает ввод в ПУ сигналов от внешних датчиков “Вскрытие”, “Перегрев”, “Дым”, размещенных в шкафу и аппаратной, а также сигналов от тумблера Мупр/ДУ (задающего режим управления маяком) и кнопок Вкл1, Вкл2, Откл (управление включением/отключением или переключением маяка), размещенных на лицевой панели ПУ.
Через порт управления выводится информация о состоянии маяка, отображаемая индикаторами HL2…HL9, размещенными на панели ПУ. Индикаторы обеспечивают сигнализацию следующих данных:
РАБОТА 1, РАБОТА 2 — включение передатчика первого или второго комплекта родиомаяка;
ДУ, Мупр — работа радиомаяка в дистанционном или местном режиме управления;
НОРМА, УХУДШ, АВАРИЯ — общее состояние радиомаяка;
НОРМА ДУ — наличие связи по каналу дистанционного управления.
Управление от кнопок возможно только в местном режиме управления маяком. Индикация режима управления осуществляется индикаторами ДУ (зеленого цвета) и Мупр (желтого цвета).
Порт управления имеет на шине процессора адрес C8H.
1.2.10.14 Схема управления ВИП и АП предназначена для включения/отключения ВИП (в данном шкафу не используется) и управления антенными переключателями.
Управление антенными переключателями выполняется или по командам одного из устройств контроля (АКО1, АКО2) при переключении с рабочего комплекта на резервный, или по командам дистанционного управления, или от кнопок управления ПУ. Управление АП “узкого” и “широкого” каналов выполняется раздельно. Управление переключением АП выполняется при наличии соответствующих сигналов контроля АП УК и ШК на входе порта схемы управления. Порт схемы управления на шине процессора имеет адрес 88H.
1.2.10.15 УСАППы предназначены для осуществления связи ПУ по последовательным каналам RS–232 с внешними устройствами. УСАПП 1, 2 предназначен для связи ПУ с устройствами контроля комплектов (АКО1, АКО2), УСАПП 3, 4 ПУ с внешними модемами для дистанционного управления по выделенной и коммутируемой линиям связи (ШДУ и КПУ), УСАПП 5, 6 для связи с устройством управления и контроля (АКУП) и с внешним ПК (подключение КПУ через нуль-модемный кабель). Вилка для подключения ПК размещена на лицевой панели ПУ.
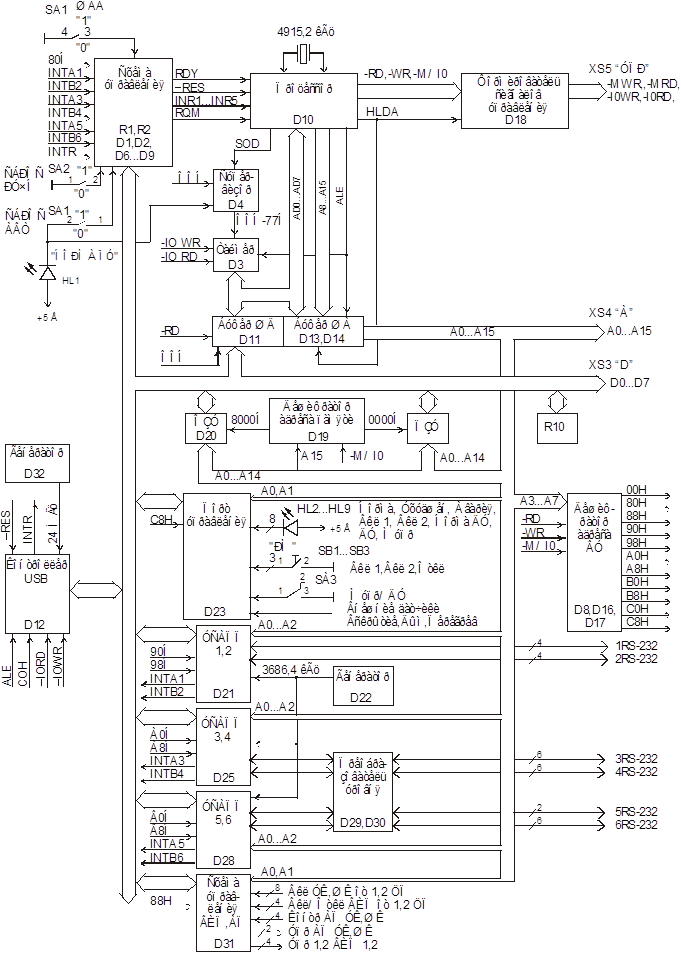
Рисунок 23. Процессор управления АИЦТ.468332.007. Схема функциональная
В качестве УСАППов используется микросхема ST16C2550IJ44 на два последовательных канала, имеющая в своем составе шестнадцать управляющих регистров и регистров состояния для задания режимов работы и хранения состояния обмена, встроенный таймер для программирования частоты обмена, приемный и передающий буферы до 16 слов. Тактовая частота 7,3728 МГц поступает на УСАППы с внешнего генератора. Программирование внутренних регистров, таймера УСАППов и обмен с процессором выполняется по параллельной байтовой шине. Входные/выходные сигналы УСАППов имеют ТТЛ-уровень. Для обмена по каналам 3RS–232,…6RS–232 установлены преобразователи уровня, входные/выходные сигналы которых имеют уровень от –10 В до + 10 В. Заполнение буферов обмена последовательных каналов определяется по прерыванию. Сигналы прерывания INT с УСАППов поступают на процессор через схему управления.
УСАППы на шине процессора имеют адреса 90H, 98H, A0H, A8H, B0H, B8H.
1.2.10.16 Схема управления обеспечивает формирование сигналов готовности (RDY), сброса (RES), запроса шины (RQM) и прерывания (INR1…INR5) процессора, а также чтение байта сигналов прерывания, поступающих от УСАППов, по адресу 80H.
Сигнал RDY формируется непрерывно высокого уровня, если переключатель ШАГ разомкнут. При замкнутом переключателе ШАГ схема управления формирует сигнал RDY высокого уровня по фронту импульсного сигнала ШАГ, поступающего с входной вилки ХР1 ПУ. Процессор начинает выполнять очередной шинный цикл записи или чтения. Выставляет на шину адреса адрес устройства, а затем сигнал –WR или –RD нулевого уровня, по которому сигнал RDY устанавливается низким уровнем, а процессор устанавливается в ждущий режим. Такой пошаговый режим используется при регулировке ПУ, так как во время ждущего режима процессора можно проверить все выходные сигналы на выходном разъеме ПУ.
Сигнал сброса RES формируется или при включении питания от RC — цепи, или при замыкании переключателя СБРОС РУЧН, или по сигналу от супервизора при замкнутом переключателе СБРОС АВТ, который формируется или при программном сбое, или при снижении напряжения питания ниже уровня +4,75В. Когда происходит сбой программы, тогда индикатор НОРМА ПУ мигает. Когда напряжение ниже нормы, тогда индикатор НОРМА ПУ не светится. При нормальной работе ПУ этот индикатор светится непрерывно.
Сигналы запроса прерывания INT от УСАППов схемой управления собираются по логической схеме ИЛИ и выдаются на вход INR2 процессора. Входы INR1, INR3…INR5 процессора подключены через резистор 10 кОм к шине КОРПУС. При появлении высокого уровня на входе INR2 процессор переключается на подпрограмму прерывания, в результате чего считывается байт сигналов прерывания от УСАППов и определяется, какой из УСАППов вызывает прерывание. Далее работа программы прерывания определяется содержимым регистров состояния УСАППа.
Вход запроса шины RQM процессора в данном ПУ не используется, поэтому он в схеме управления подключен через резистор 10 кОм к шине КОРПУС.
1.2.10.17 В качестве супервизора используется микросхема MAX695EPE. Супервизор используется для формирования сигнала сброса при программном сбое процессора (отсутствии сигнала SOD на входе супервизора) и блокировки прохождения сигнала выбора таймера при снижении напряжении питания ПУ ниже +4,75 В. Сигналом SOD сбрасывается счетчик супервизора, на вход которого поступает тактовая частота от встроенного генератора. При отсутствии сигнала SOD счетчик заполняется, и на выходе супервизора формируется сигнал сброса низкого уровня длительностью 200 мс. Период формирования сигнала сброса — 1,6 с. Питание супервизора осуществляется или от источника питания ПУ +5В, или от внутреннего источника питания таймера. Переключение на внутренний источник питания таймера происходит при снижении напряжения источника + 5 В ниже + 4,75 В.
1.2.10.18 Таймер используется для подсчета наработки маяка. Имеет встроенные генератор, источник питания, ОЗУ, часы/календарь. Он подключен к параллельной шине процессора как ВУ и занимает адресное пространство 00H…77H. ОЗУ таймера может использоваться как энергонезависимая память. Сигналом сброса процессора –RES таймер также устанавливается в исходное состояние.
|
из
5.00
|
Обсуждение в статье: Аппаратура управления и проверки |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы