 |
Главная |


ЛАЗЕРНОЕ СКАНИРОВАНИЕ ЖЕЛЕЗНОДОРОЖНОЙ ЛИНИИ
|
из
5.00
|
Рис. 2 Сигналы спутника и приемника
Точность всех вычислений напрямую зависят от точности хода часов. Код дол--жен генерироваться на спутнике и приёмнике в одно и то же время. На спутниках установлены атомные часы, имеющие точность около одной наносекунды.
Если получены измерения с трёх спутников и все часы точные, то круг, описан-ный радиус-вектором от третьего спутника, будет пересекаться в одной точке, как показано на рис.3. Однако, если часы в приёмнике спешат или отстают, то координаты приемника будут вычислены с ошибкой.
Поэтому для устранения ошибок хода часов в приемнике требуется измерение расстояния до четвертого спутника, рис.4.
Когда GPS-приемник получает серию измерений, которые не пересекаются в одной точке, то компьютер в приёмнике начинает вычитать (или добавлять) время методом последовательных итерации до тех пор, пока не сведёт все измерения к одной точке. После этого вычисляется поправка и делается соответствующее уравнивание.

Рис.3 Три измерения с точными часами
 Рис.4 Точное определение местоположения приемника
Рис.4 Точное определение местоположения приемника
Таким образом, для надежной работы необходимо иметь минимум четыре спутника, чтобы определить трёхмерные координаты объекта. Чем больше спутников находится над горизоном, тем точнее измерения.
Орбиты спутников практически круговые и расположены на геодезической высоте, равной 20180 км и на расстоянии 26600 км от центра Земли.
Количество спутников (24) и их расположение обеспечивают одновременный прием сигналов как минимум от четырех спутников в любой части Земли.
Практически все оборудование GPS имеет одинаковые основные составные части – антенна, сектор РЧ (радиочастотный), микропроцессор, система контроля и управления (CDU), записывающее устройство и источник питания. Эти части могут функционировать как по отдельности, так и собранные вместе или частично собранные. Обычно все части, за исключением антенны, сгруппированы вместе и называются GPS приемником. GPS сигналы используются как гражданскими, так и военными пользователями. Любой пользователь, имеющий GPS приёмник, может использовать GPS сигналы. Выбор оборудования напрямую зависит от точности, которую нам необходимо получить.
GPS-приемники подразделяются на два класса: навигационные и геодезические.
Навигационные и геодезические GPS-приёмники разработаны для разных целей.
 |
Навигационные приборы созданы для того, чтобы быстро определять местона-хождение без особых требований к точности. Для решения этой задачи данные приборы в осноном определяют местоположение без учета качества сигнала, получаемого ими. Это совершенно устраивает обычных потребителей, которым, например, для обнаружения искомого объекта, вполне достаточно оказаться в 10 метрах от него.
Рис.5 Абсолютное координирование
Приборы делятся на геодезические и навигационные по трем основным факторам:
· контроль качества принимаемых GPS-данных;
· электромагнитная защита;
· технология антенны.

Рис.6 Относительное координирование
Навигационные приборы обычно накапливают все данные – хорошие, плохие и очень плохие – но эта “продуктивность” может стать причиной потери точности, данные с любительских приборов содержат неполную информацию для осуществления постобработки и, если дифференциальная коррекция в реальном времени невозможна, не существует альтернативы, кроме использования автономного режима.
По своей природе GPS-сигналы слабы и сильно искажаются под воздействием расположенных поблизости электромагнитных устройств. Эти электромагнитные воздействия могут полностью подавить сигнал в электронном шуме. GPS-приемники геодезического класса разработаны с дополнительной защитной технологией, которая минимизирует эффект побочных электромагнитных сигналов, исходящих от прочего оборудования. Приём качественных GPS-сигналов требует хорошо настроенной антенны. Антенны, поставляемые с геодезическими GPS-приборами, разработаны с функцией разделения сигналов с низким качеством от высококачественных сигналов для лучшего использования при всём многообразии условий.
Все методы GPS координирования разделяются на статические и кинемати-ческие, абсолютные и относительные, а также на методы работы в режиме реального времени и с последующей обработкой данных.
С помощью системы GPS можно определить как координаты одного конкрет-ного объекта, так и координаты какого-либо объекта относительно другого объекта. Искомые координаты объекта определяют относительно центра земли, используя известное местоположение спутников GPS.
Такой метод определения координат называется абсолютным координированием (или координированием предмета) рис.5.
Дифференциальный метод (относительное координирование) определения коор-динат подразумевает поиск неизвестных координат объекта относительно известных координат другого предмета, рис.6.
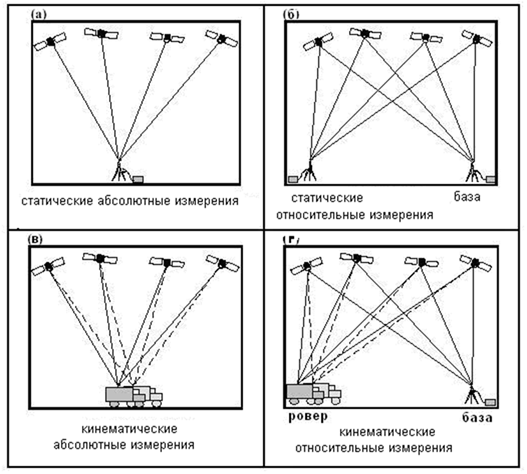
Рис.7 Статические и кинематические измерения
Преимуществом относительного метода координирования является большая точность, потому что во время обработки данных уровень погрешности компенси-руется, так как он одинаков для известного и неизвестного предметов.
GPS координирование бывает статическим и кинематическим. При статическом координировании GPS приемник стационарен, в то время как при кинематическом координировании приемник записывает GPS данные, находясь в движении. На рис.7 изображены примеры статического и кинематического координирования как при абсолютном, так и при относительном координировании. При кинематическом относи-тельном координировании один приемник, называемый базой, неподвижен, а второй приемник, ровер, передвигается по заданному пути.
Кооординаты объектов в системе GPS можно определять в режиме реального времени или с последующей обработкой. В режиме реального времени координаты объектов вычисляются пратически мгновенно, а в режиме с последующей обработкой данные обрабатываются только после сбора всей информации.
При относительном координировании в режиме реального времени требуется связь между приемниками, чтобы передавать данные с измерениями базы, находящейся в пункте с известными коодинатами.
Рис.8 Принцип действия лазерного сканера 
|
При относительном координировании в режиме последующей обработки требуется сначала собрать все данные с приемников после проведения измерений. Даже при относительном координировании в режиме реального времени во многих случаях целесообразно сохранять данные в специальную базу данных для возможной последующей обработки пользователем.
3. Лазерное сканирование
При использовании лазерного сканирования возможно:
· создание топопланов масштабов вплоть до 1:2000;
· надежное дешифрирование большинства важнейших контуров;
· автоматическое распознавание и геопозиционирование широкого класса объектов естественной и антропогенной природы.
Результаты лазерного сканирования представимы в GIS и CAD приложениях.
Расстояние до объекта измерения определяется путем умножения времени задержки отклика на скорость света, рис.8.
Типичные технические характеристики наземных лазерных сканеров:
| Характеристика | Rigel LMS-Z210 | Rigel LMS-Z360 |
| Дальность, м | 2-350 | 2-250 |
| Точность, мм | 6-12 | |
| «Поле зрения» гориз×верт | 330×80 | 360×90 |
| Рабочие температуры | -10 +50 ºC | -10 +50 ºC |
| Минимальный угловой шаг сканирования, мин | 0.5 | |
| Вес, кг | 14.2 | |
| Класс безопасности | Class 1 | Class 1 |
Лазерный сканер может быть установлен на вертолете или самолете, рис.9.
Для позиционирования излучателя в пространстве используется система GPS.
Типичные характеристики воздушного лазерного сканера:
· частота импульсов 33-70 кГц
· рабочие высоты 50-6000 м
· точность по высоте 10-15 см
· плановая точность 1/1000-1/2000 высоты.

Рис.9 Воздушное лазерное сканирование

Рис.10 Типы отражателей и положение точек на поверхности объекта при мобильном сканировании
ЛАЗЕРНОЕ СКАНИРОВАНИЕ ЖЕЛЕЗНОДОРОЖНОЙ ЛИНИИ
На цифровых снимках, сопровождающих лазерное сканирование, видны элементы путевого развития станции, подъездные пути, здания и сооружения, растительность и дру-гие компоненты, необходимые для корректного дешифрирования результатов съемки. 
|
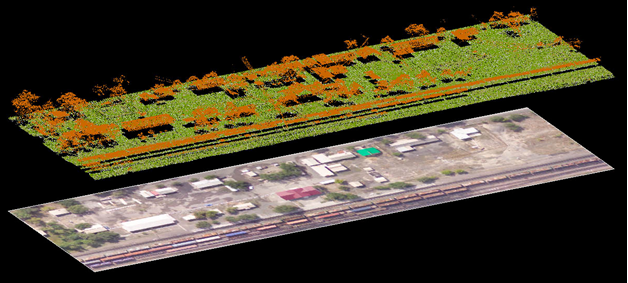
В результате съемки с помощью лазерного сканера получается облако точек и цифровая фотография местности.
 Убирая мост, деревья, кустарники, среднюю и низкую растительность строим поверхность земли, на которой четко читаются все микроформы рельефа.
Убирая мост, деревья, кустарники, среднюю и низкую растительность строим поверхность земли, на которой четко читаются все микроформы рельефа.
В результате обработки материалов сканирования получатся трехмерная модель местности и цифровой топографический план в масштабе от 1:200 до 1:5000. 
4. 
Видеопаспортизация
Рис.11 Структурная схема системы видеопаспортизации
Главная идея системы видеопаспортизации дорог (далее - СВПД) состоит в точных измерениях параметров видимых дорожных объектов по видеоинформации. Теоретические принципы и практические методы таких измерений в настоящее время хорошо известны - это методы фотограмметрии. Фотограмметрия - определение формы, размеров и положения объектов по их фотографическим изображениям.
Задача сводится к определению координат по угловым смещениям движущегося изображения объекта. Для успешного решения этой задачи были использованы элементы проективной геометрии, матрично-векторного исчисления и методов динамической фотограмметрии (так называемой фотограмметрии большого числа измерений).
Аппаратная схема СВПД представлена на рис.11. Система базируется на системе видеопаспортизации для автомобильных дорог.

| 
| ||
|

Условные обозначения: PC – промышленный компьютер; ВК – видеокамеры; К – контроллер; БП – блок питания; ИНС – инерциальная навигационная система (гироскоп); ДС – датчик скорости (пути); ДП – датчики вертикального положения; GPS – приемник спутниковой навигации.
Измерительно-регистрирующее оборудование является ядром СВПД, в котором производятся все основные действия по управлению элементами системы, сбору информации с датчиков и записи полученных результатов. Система состоит из двух подсистем – видеосистемы и системы позиционирования. Управление каждой из подсистем возложено на компьютер. Видеосистема комплектуется компьютером, реализующим функции операторской консоли и записи видео потока на жесткий диск. В состав системы позиционирования входит компьютер, осуществляющий сбор данных с датчиков (контроллер системы позиционирования).
Консольный компьютер - это персональный компьютер класса Пентиум-IV в специализированном корпусе с жидкокристаллическим монитором. На его боковую панель выведены разъемы четырех аппаратных кодеков для подключения видеокамер и разъем контроллера системы позиционирования.
В систему входят четыре профессиональные видеокамеры высокого разрешения (800 ТВЛ).
Камеры устанавливаются в герметичные кожухи и подключаются к четырем платам аппаратной видеокомпрессии посредством бронированного 10-метрового кабеля. Крепеж камер к корпусу вагона производится при помощи магнитных подложек и механическим креплением. На одну из камер устанавливается GPS антенна одночастотного приемника. Настройка параметров экспозиции камер осуществляется по последовательному интерфейсу с консоли.
Контроллер системы позиционирования – одноплатный компьютер, предназначенный для сбора данных с навигационных приборов и датчиков положения, их оцифровки и передачи информации на главный компьютер.
Инерциальная навигационная система располагается в одном корпусе с контроллером и состоит из трех волоконно-оптических гироскопов и двух инклинометров.
ДС – датчик скорости (пути) для автомобиля – это датчик поворота, укрепляемый на ось скоростемера, для железной дороги используется электронный разветвитель датчика пути локомотива, который выдает 42 импульса на каждый оборот колеса. ДП – датчики положения кузова для пересчета положения GPS приемника на ось пути.
Блок питания – промышленный преобразователь из 12В в 220В служит для подключения СВПД к аккумулятору автомобиля. На локомотиве используются сетевые розетки с обязательным подключением системы через блок бесперебойного питания.
В момент экспозиции каждого кадра синхронно происходит опрос датчиков системы позиционирования. Определяется номер кадра, видеосигнал оцифровывается, производится его MPEG2 компрессия и запись на жесткий диск компьютера для хранения. Между компьютерами существует связь по специальному каналу обмена. Во время работы системы канал обмена позволяет синхронизировать работу компьютеров, а по окончании рабочего режима обмениваться информацией, записанной во время работы. Результаты работы прописываются в специальный файл данных.
Съемка видео производится синхронно со всех камер с частотой 50 Гц и разрешением кадра 720х576 точек.
Объем накопленных данных составляет в среднем 2GB/час с каждой камеры.
Потоковое видео с темпом съемки 50 полукадров в секунду теоретически позволяет проводить измерения на скорости 90 км/ч при 50 сантиметровом шаге экспозиции.

|
На крыше локомотива располагается GPS антенна приемника геодезического класса, синхронно с ней идет сбор данных на базовой станции. Синхронизация данных разных GPS приемников осуществляется по абсолютному времени.
Камеры располагаются на крыше локомотива, а консольный компьютер и контроллер системы позиционирования – в кабине машиниста. Одна из камер была направлена на контактную сеть.
После завершения заезда данные переносятся на файловый сервер, и можно приступать к обработке данных. Оператор производит измерения интересующих его объектов непосредственно на экране компьютера. Измерения геометрических характеристик и параметров объектов заносятся в базу данных.
Программа использует точную математическую модель, которая учитывает не только положение и ориентацию видеокамеры, но и параметры применяемого объектива. Все это позволяет проводить измерения длин и площадей горизонтальных и вертикальных объектов с необходимой точностью. Возможность экспорта в различные форматы данных позволяет совмещать полученную информацию с данными других измерений, а также строить трехмерные модели интересующих объектов. На рисунке показан фрагмент видеосъемки небольшого участка дороги. После оцифровки моста и близлежащих к нему опор план этого участка был перенесен в Автокад и на его основе построена трехмерная модель участка пути.
5. Инженерно – геологические изыскания при проектировании реконструкции железных дорог и ремонтов пути
Целью инженерно-геологических работ является определение состояния балластной призмы и земляного полотна. При геологическом обследовании балластного слоя руководствуются «Методическими указаниями по обследованию балластного слоя» ЦПТ-16/77, ВТУ № ПДЛ-30/16 от 28.05.96 г. Обследование включает в себя:
· определение толщины балластного слоя, в т.ч. толщины песчаной подушки;
· полевое определение (отбор стандартных проб) загрязненности щебня на глубине 25-40 см от подошвы шпалы. При толщине балласта более 60 см дополнительно определяется загрязненность балласта и его качественные характеристики на глубине 60-70 см.
Определение толщины и состояния балластного слоя под шпалой производится по оси пути не менее, чем в трех местах на километр, у пассажирских платформ (начало, конец), по осям искусственных сооружений, у переездов и на стрелочных переводах, а также в точках, определенных по результатам нагрузочных испытаний и статистической оценке стабильности рельсовой колеи, согласованных с дистанцией пути.
Разбивка геологических выработок для обследования земляного полотна производится по оси пути и поперечным профилям. По оси пути должны быть пройдены выработки глубиною ниже зоны промерзания. В выемках, на нулевых местах и насыпях высотой до двух метров закладываются не менее трех выработок по оси пути (начало, середина, конец участка). На насыпях выше двух метров, не имеющих видимых дефектов - не менее трех выработок по оси пути на километр. При обнаружении глинистых грунтов в зоне сезонного промерзания, определяются границы участка их залегания. На таких участках закладываются геологические поперечники (не менее трех), при этом должны быть определены очертание основной площадки земляного полотна, уровень грунтовых вод.
При камеральной обработке геологических выработок по оси пути за нулевой отсчет принимается уровень подошвы шпалы.
Инженерно-геологическое обследование деформированных участков земляного полотна на действующих путях производится согласно «Техническим указаниям по устранению пучин и просадок железнодорожного пути», ЦП /4369. Во избежание образования на основной площадке карманов балласта тампонаж выработок следует производить с трамбованием, восстанавливая послойное состояние грунта.
Планово-высотная привязка геологических выработок выполняется для определения высотных отметок устьев скважин и привязки геологических выработок к пикетажу по данным геологов.
По результатам геологического обследования в местах расположения пучинистых грунтов в зоне промерзания, в т.ч. на участках замены асбестового балласта на щебеночный, проводятся теплотехнические расчеты с целью оценки необходимости проектирования мероприятий по предотвращению пучинных деформаций.
На основании результатов инженерно-геологических работ составляется “Отчет о инженерно-геологических изысканиях”, в состав которого входят:
· продольные геологические профили;
· поперечные геологические профили;
· ведомости полевых и лабораторных исследований грунтов;
· таблица определения мощности и загрязненности балласта;
· заключение о состоянии земляного полотна.
|
из
5.00
|
Обсуждение в статье: ЛАЗЕРНОЕ СКАНИРОВАНИЕ ЖЕЛЕЗНОДОРОЖНОЙ ЛИНИИ |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы