 |
Главная |


для работы с aсинхронными
|
из
5.00
|
Воз действиями.
532,3
| Преобразователи информации с зако- ном функционирования, представляе- мым функциями переходов и выходов асинхронного автомата имеют дело с сигналами, изменяющимися в произ- вольные моменты времени. |
| Тактами при этом являются отрезки вре- мени, в которые входные воздействия не- изменны. Реакция автомата на изменение воздействия (изменение состояния или выходных сигналов) проявляется с за- держкой £ tзад из-за инерционности реа- лизующей автомат схемы. |
| При этом реализация должна обеспечи вать приемлемую для конкретных прак- тических целей величину tзад . Входные воздействия имеют ограниче- ния на минимально допустимую длитель- ность такта Tmin и максимальное время задержки реакции на них tзад . |
| Имея синхросигналы с периодом t при t < Тmin и t< tзад , можно реализовать асинхронный преобразователь, исполь- зуя синхронный автомат со специальны- ми входными сигналами. |
| Синхронный автомат работает здесь в так называемой “быстрой тактности”, задаваемой сигналами С с периодом t<Тmin. (Быстрой она называется из-за того, что во время такта t может быть много тактов t ) |
| Схема привязки (вариант) |
| Входные схемы строятся на основе D- триггеров и осуществляют привязку к “быстрому такту” каждого входного сиг- нала, обеспечивая неизменность сигна- лов для синхронного автомата на время такта. |
| После привязки сигнал хi может отста- вать на время t от исходного хi*, что мы полагаем допустимым по условиям реа- лизации. Заменив исходные хi* на хi, мы получаем возможность обрабатывать их синхрон- ным автоматом. |
| Функция переходов синхронного авто- мата определяется так: 1) Для любой пары X,S значение состоя- ния перехода S(t+1) асинхронного авто- мата, если оно определено задает состоя- ние синхронного. S(t+1) = S(t+1) = F( X(t+1), S(t) ) S(t+1) = =F(X(t),S(t)) |
| Для асинхронного автомата не опре- делено S(t+1) для F( Xi, F(Xi, Sj) ) Во входной последовательности асин- хронного автомата не может быть двух идущих подряд Xi . |
| В таких случаях для синхронного авто- мата мы будем определять функцию переходов как F( Xi, F(Xi, S) )= F(Xi, S). |
| Такую функцию переходов (и соответст- венно выходов для автомата Мили) на- зывают устойчивой. |
| При повторении входных воздействий cинхронный автомат не будет менять своей реакции, а при смене входного воз- действия (с задержкой от схемы привяз- ки к такту) будем менять в соответствии с функцией переходов и выходов для асинхронного автомата. |
| В каждом “быстром такте” выходные сигналы определяются функцией выхо- дов исходного асинхронного автомата. Остается только принять меры к тому, чтобы они сохранялись в паузах между тактами, если их значение не меняется. |
| Это безусловно будет, если в качестве ЭА использовать схемы триггеров, упра- вляемые синхросигналами так, что в пау- зах между тактами состояния выходов триггеров сохраняются. |
| Именно так обстоит дело с типовыми схемами ЭА, например: Здесь такт при С = 1 |
| Пример недопустимой схемы ЭА: (Такт при C = 1) |
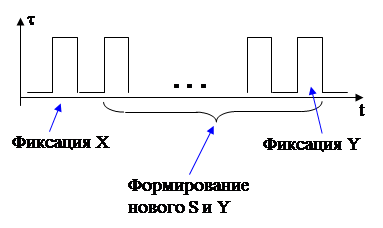
| Примечание Во время фиксации значений Х* они мо- гут менятся и соответственно будет за- фиксировано либо еще не измененное, либо уже новое значение. |
| Если изменяется лишь один хi*, то это приводит только к возникновению, либо к невозникновению задержки хi от хi*. Если сразу меняется несколько входных сигналов, может возникать неоднознач- ность восприятия. |
| Пример При переходе 01®10 может возникнуть и зафиксироваться хi хj= 11. |
| Избавится от такой неоднозначности можно только установив на дисцип- лину смен входных сигналов (запретив одновременное изменение входов). |
| Если требования к быстродействию ав- томата таковы, что допускается задержка реакции на несколько (или даже много) “быстрых тактов”, можно использовать синхронный автомат с мультиплексиро- ванием всех входов в один. |
| Идея построения схемы |
| Фиксация X и Y выполняется синхрони- зируемыми триггерами. |
| Ранее формирование Y ( и новых значе- ний S ) осуществлялось КС в паузе между ” быстрыми тактами” и фиксация Y не была нужна. Теперь мы будем формиро- вать их за несколько ” быстрых тактов”, что требует сохранения Y на время фор- мирования нового значения. |
| Строя асинхронный преобразователь как автомат Мура или Мили, мы используем разные решения. Начнем рассмотрение с автомата Мура. |
| Пусть, например, нам нужно реализовать переходы вида: Будем осуществлять их последовательно по отдельным переменным в отдельных. 560 “быстрых тактах”. |
| Для этого возьмем мультиплексор |
| Теперь представим схему |
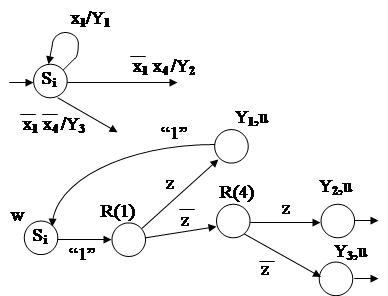
| Переходы в автомате “быстрой тактнос- ти” определим в соответствии с законом функционирования исходного асинхрон- ного автомата. |
| Пример |
| Общая схема имеет вид |
| Последовательность действий здесь такова Здесь Y,u,w,R – сигналы в быстрых 566 тактах при t = 1 |
| Построенная схема реализует некоторый управляющий автомат. В то же время ав- томат “быстрой тактности” можно рас- сматривать как УА Мура, работающий с операционным автоматом. |
| 568 w здесь может совпадать с u ( w = u ) |
| При подобной реализации асинхронного автомата Мили вид схемы может остать- ся прежним, но функционирование авто- мата “быстрой тактности” изменится. Суть изменений легко увидеть на при- мере. |
|
 Последовательность действий здесь такова:
Последовательность действий здесь такова:
|
В заключение отметим, что автомат быстрой тактности часто строится так, что сигналы
w,R,u снимаются прямо с выходов ЭА при соответствующем кодировании состояний автомата (см. 2.3)
|
из
5.00
|
Обсуждение в статье: для работы с aсинхронными |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |
Популярное:
Организация как механизм и форма жизни коллектива: Организация не сможет достичь поставленных целей без соответствующей внутренней...
Как распознать напряжение: Говоря о мышечном напряжении, мы в первую очередь имеем в виду мускулы, прикрепленные к костям ...
Как вы ведете себя при стрессе?: Вы можете самостоятельно управлять стрессом! Каждый из нас имеет право и возможность уменьшить его воздействие на нас...

©2015-2024 megaobuchalka.ru Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. (417)
Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы