 |
Главная |


Первичная обработка данных
|
из
5.00
|
Поскольку автоматизированная система расположена на территории электростанции, то на результат любых измерений оказывают влияние сильные электромагнитные помехи, приводящие к значительным случайным погрешностям. Поэтому целесообразно производить многократные измерения физических величин и рассчитывать их оценки в результате статистической обработки.
1. Данные, поступающие с датчика, измеряющего положение подвижной каретки, представляют собой постоянную величину. Результат измереия постоянной величины обычно представляется в форме измXX~Δ±, где X~ - приближенная оценка измеряемой величины; ΔXизм – приближенная оценка погрешности измерений, представленная в виде верхней и нижней границ диапазона значений. Расчеты ведутся по формулам:
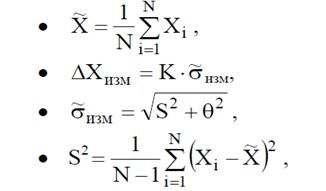
где N - количество наблюдений («замеров»); Xi – результат i-го наблюдения («замера»); K – некий коэффициент, зависящий от N и от Pдов (например, при Pдов=0.95 используют K=1.96); изм~σ- оценка с.к.о. полной ошибки измерений; S2 - дисперсия случайной составляющей погрешности измерений; θ2 – дисперсия инструментальной погрешности, приписываемой использованному средству измерения (см. раздел «Расчет погрешности измерительных каналов»).
2. Данные, поступающие с датчика, который измеряет «биения» вала, представляют собой изменяющийся во времени случайный процесс вида
X(t) = g(t)+ξ(t), (5)
где g(t) – «тренд», т.е. детерминированная функция, описывающая поведение процесса во времени; ξ(t) – случайный «шум», вызванный воздействием электромагнитных помех.
| Исходный «зашумленный» процесс | б) Сглаженный процесс, «тренд» |
Рис. 27. Сглаживание эмпирических данных
Для разделения процесса на «тренд» и «шум» используются разные подходы. Проиллюстрируем один из них, основанный на методах цифровой фильтрации.
Метод скользящего среднего по n точкам представляет собой применение для каждого i-го отсчета выборки следующей системы правил (на примере n=3):
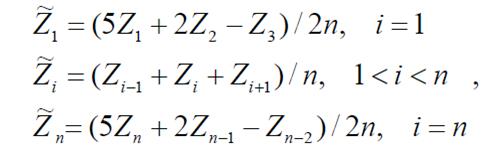
(6)
где  - новое, «сглаженное» значение отсчета.
- новое, «сглаженное» значение отсчета.
Обратите внимание, что этот метод работает «с задержкой», т.е., например, при n=3 для выполнения расчетов для i-го элемента выборки необходимо дождаться появления (i+1)-го элемента. Можно избавиться от задержки, применив правило n), но в этом случае погрешность сглаживания будет выше.
Также можно использовать метод медианной фильтрации по n точкам, основанный на правиле:
 (7) )
(7) )
где med(.) означает среднее по величине из группы значений.
После сглаживания необходимо рассчитать Zmin и Zmax – предельные значения в выборке и проверить выполнение условия Zmin >-3 мм и Zmax<+3 мм.
|
из
5.00
|
Обсуждение в статье: Первичная обработка данных |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы