 |
Главная |


Основы проектирования приводов оборудования
|
из
5.00
|
Исходными параметрами при расчете электропривода являются: мощность на рабочем валу и угловая скорость (или частота вращения) этого вала.
Мощность на рабочем валу Р, Вт определяют по формуле:
 , (1)
, (1)
где МК – крутящий момент отвинчивания гайки (винта), Н·м;
ω – угловая скорость, рад/с.
Частота вращения рабочего вала принимается при конструировании. Зная исходные параметры, составляют кинематическую схему привода и определяют общее передаточное число, общий КПД и требуемую мощность электродвигателя. Общее передаточное число привода:
 , (2)
, (2)
где ωэд – угловая скорость вращения вала электродвигателя, рад/с;
пэд и п – соответственно частота вращения вала электродвигателя и рабочего вала гайковерта, мин-1.
Общее передаточное число привода iобщ разбивают по отдельным ступеням с учетом принятой конструкции привода:
 , (3)
, (3)
где iз – передаточное число зубчатой передачи;
iч – передаточное число червячной передачи;
iц – передаточное число цепной передачи.
Требуемая мощность электродвигателя РТр, Вт определяется с учетом общего КПД привода:
 , (4)
, (4)
где ηобщ – общий КПД привода.
Усилие, необходимое для запрессовки (выпрессовки) деталей может создаваться различными устройствами: механическими (винтовыми, инерционными, эксцентриковыми, клиновыми) пневматическими, гидравлическими, пневмогидравлическими.
Пневматический привод. Для механизации разборки (сборки) прессовых соединений целесообразно использовать приспособления с пневматическим или гидравлическим приводом. При усилии распрессовки до 60 кН применяют пневматический привод, а при большем – гидравлический. Силовой пневматический привод (рисунок 1) состоит из пневмоцилиндра (пневмокамеры), аппаратуры и воздухопроводов.
Рисунок 1 – Применение пневматического привода в разборочном производстве:
1 – пневмоцилиндр; 2 – рычаг; 3 – пуансон; 4 – детали прессового соединения
Осевая сила на штоке пневмоцилиндра (l1 = l2):
– одностороннего действия
 (5)
(5)
– двухстороннего при подаче воздуха со стороны поршня
 (6)
(6)
– двухстороннего при подаче воздуха со стороны штока
 (7)
(7)
где Dц – диаметр пневмоцилиндра (поршня), мм;
dш – диаметр штока пневмоцилиндра, мм;
p – давление сжатого воздуха, (обычно 0,6 МПа);
η – КПД пневмоцилиндра, (обычно 0,85–0,9);
Qпр – усилие пружины.
При непосредственном воздействии штока на деталь прессового соединения осевая сила на штоке должна быть S = Q ≥ N (N – усилие распрессовки). Полученное значение диаметра округляют до ближайшего большого по ГОСТ 15608–81Е и по принятому значению диаметра рассчитывают действительную силу на штоке.
При расчете пневматических поршневых цилиндров на прочность определяются толщина стенок цилиндра, количество и диаметр шпилек (болтов) для крепления его крышек и диаметр резьбы на штоке.
Обычно при расчете на прочность толщины стенок цилиндра получаются слишком незначительные величины. Цилиндры со стенками таких размеров не обладают жесткостью, необходимой для эксплуатации.
Пневмогидравлический привод сочетает характеристики пневматического и гидравлического приводов. Привод работает от сжатого воздуха давлением 0,4–0,6 МПа из цеховой системы. Давление масла в гидравлической части привода может быть в пределах 6–10 МПа. По сравнению с гидравлическими приводами они имеют значительно меньший объем масла (1,5–2,0 л вместо 50–70 л), заполняющего полости цилиндров и трубопроводов. Масло циркулирует в замкнутой системе.
Рисунок 2 – Схемы пневмогидравлических приводов прямого (а)
и последовательного (б) действия
Расчет силы S на штоке рабочего гидроцилиндра:
 , (8)
, (8)
где D – диаметр поршня гидроцилиндра, мм;
РМ – давление масла, МПа;
ηМ – КПД гидроцилиндра (ηМ = 0,95 – 0,98);
d – диаметр штока гидроцилиндра, мм;
ηВ – КПД гидроцилиндра (ηВ = 0,85 – 0,90);
D1 – диаметр поршня гидроцилиндра, мм.
Величина хода штока гидроцилиндра:
 (9)
(9)
где l – ход штока рабочего гидроцилиндра, мм;
n – число рабочих гидроцилиндров, работающих от преобразователя;
ηo – объемный КПД привода (ηo = 0,95).
Гидропривод по сравнению с пневмоприводом обладает рядом преимуществ:
– габаритные размеры силовых агрегатов значительно меньше в связи с тем, что давление рабочей жидкости в системе в 10–30 раз выше, чем воздуха в пневмодвигателях;
– большие силы со штока гидроцилиндра можно передавать непосредственно на закрепляемое изделие без применения зажимных механизмов – усилителей;
– компактность гидроприводов позволяет создавать удобные агрегатируемые приводы для нескольких приспособлений при небольшой программе ремонта;
– гидропривод работает плавно и бесшумно;
– рабочая жидкость одновременно выполняет функции смазки, предохраняя сопрягаемые детали от износа и коррозии.
Существенными недостатками гидроприводов является их высокая первоначальная стоимость за счет сложности насосов, управляющей и контрольно-регулирующей аппаратуры, а также повышенные требования к эксплуатации для предупреждения утечки рабочей жидкости. КПД привода в значительной степени зависит от вязкости рабочей жидкости.
В гидроприводах исходной энергией является потенциальная энергия (энергия давления) рабочей жидкости.
Силовой цилиндр является двигателем, преобразующим энергию жидкости в механическую энергию перемещения поршня.
По конструкции силовые цилиндры можно объединить в следующие группы:
а) с односторонним выходом штока, рисунок 3б:
 (10)
(10)
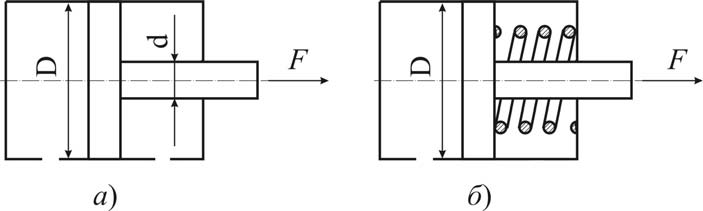
Рисунок 3 – Силовой цилиндр с односторонним выходом штока
Для этих цилиндров движущее усилие на штоке определяется из выражения, которое учитывает противодавление:
– для двухстороннего действия (бесштоковая полость) (рисунок 3, а):
 (11)
(11)
– для двухстороннего действия (штоковая полость):
 (12)
(12)
где D – диаметр пневматического цилиндра (поршня), мм;
d – диаметр штока пневматического цилиндра (поршня), мм;
рВ – давление сжатого воздуха в сети. Обычно принимается равным 0,6 МПа;
η – коэффициент полезного действия пневмоцилиндра (η = 0,85–0,90);
Fпр – усилие предельно сжатой пружины обратного хода, Н.
Диаметр пневмоцилиндра для закрепления, мм:
 , (13)
, (13)
где Fp – сила срезания, Н.
Полученное значение диаметра округляют до ближайшего большого по ГОСТ 15608–81Е и по принятому значению диаметра рассчитывают действительную силу на штоке.
Гидропривод по сравнению с пневмоприводом обладает рядом преимуществ:
– габаритные размеры силовых агрегатов значительно меньше в связи с тем, что давление рабочей жидкости в системе в 10–30 раз выше, чем воздуха в пневмодвигателях;
– большие силы со штока гидроцилиндра можно передавать непосредственно на закрепляемое изделие без применения зажимных механизмов – усилителей;
– компактность гидроприводов позволяет создавать удобные агрегатируемые приводы для нескольких приспособлений при небольшой программе ремонта;
– гидропривод работает плавно и бесшумно;
– рабочая жидкость одновременно выполняет функции смазки, предохраняя сопрягаемые детали от износа и коррозии.
Существенными недостатками гидроприводов является их высокая первоначальная стоимость за счет сложности насосов, управляющей и контрольно-регулирующей аппаратуры, а также повышенные требования к эксплуатации для предупреждения утечки рабочей жидкости. КПД привода в значительной степени зависит от вязкости рабочей жидкости.
В гидроприводах исходной энергией является потенциальная энергия (энергия давления) рабочей жидкости.
Силовой цилиндр является двигателем, преобразующим энергию жидкости в механическую энергию перемещения поршня.
По конструкции силовые цилиндры можно объединить в следующие группы:
а) с односторонним выходом штока, рисунок 4:
Рисунок 4 – Силовой цилиндр с односторонним выходом штока.
Для этих цилиндров движущее усилие на штоке определяется из выражения, которое учитывает противодавление:
 (14)
(14)
где р1 и р2 – давления в полостях цилиндра, разделенного поршнем, МПа;
D – диаметр цилиндра внутренний, мм;
d – диаметр штока, мм;
η – механический КПД силового цилиндра (если уплотнение поршня – резиновые кольца, то η = 1,0; если уплотнение – металлические кольца, то η = 0,95–0,98).
б) с двусторонним выходом штока, рисунок 5.
Рисунок 5 – Силовой цилиндр с двусторонним выходом штока
Движущее усилие такого цилиндра:
 (15)
(15)
в) одностороннего действия, рисунок 6.
Рисунок 6 – Силовой цилиндр одностороннего действия
Возвратное движение штока в данном случае осуществляется за счет пружины.
Движущее усилие на штоке:
 (16)
(16)
где Fпp – усилие, развиваемое пружиной.
Диаметр штока:
 (17)
(17)
Расход жидкости Q, м3/с:
 , (18)
, (18)
где V – скорость движения поршня, м/с;
s – площадь эффективного сечения поршня, м2.
Внутренний диаметр цилиндра рассчитывается по формуле:
 (19)
(19)
где FН – номинальное усилие на штоке, Н;
р – давление жидкости, МПа.
Номинальное давление р, развиваемое насосом, выбирается по ГОСТ 12445–80 из следующего ряда (в МПа): 4; 6,3; 10; 12,5; 14; 16; 20; 25.
Полученное значение диаметра цилиндра округляют до ближайшего стандартного значения по ГОСТ 6540–68. Выбранный, конструктивный диаметр должен быть больше или равен
расчетному, т. е. D ≥ Dp.
Ход штока:
 . (20)
. (20)
Внутренний диаметр трубопровода dт, мм, определяют по формуле:
 , (21)
, (21)
где VT – скорость движения жидкости в трубопроводе, м/c.
|
из
5.00
|
Обсуждение в статье: Основы проектирования приводов оборудования |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы