 |
Главная |


Четырёхосная система координат
|
из
5.00
|
Четырёхосная (четырёхмерная) система координат.
Околович Сергей РФ МО с. Жаворонки. 3.06.2015
Четырёхосная система координат.
Расчёт угла наклона осей производится следующим образом:
Дано: Куб со стороной равной единице.
 Необходимо вычислить угол наклона диагонали куба, соединяющей противоположные вершины, и проходящей через геометрический центр фигуры, к прилежащему ребру.
Необходимо вычислить угол наклона диагонали куба, соединяющей противоположные вершины, и проходящей через геометрический центр фигуры, к прилежащему ребру.
Если х – длина ребра куба, то х2+х2=у2Таким образом y – длина диагонали квадрата (грани куба).
х2+у2=z2, где z – длинна диагонали куба.
Далее по полученным формулам:
х = 1
у = √(12+12) = √2
z = √(12+(√2)2)= √(1+2)= √3
Получаем прямоугольный треугольник с катетами равными 1, √2 и гипотенузой равной √3
Необходимо вычислить угол между наименьшим катетом и гипотенузой. Воспользуемся тригонометрической функцией arcsin α,
Если sin α=y/z=√2/√3=0,81649658093, то arcsin α = 54,73561031747 ̊
 Таким образом, я получил значение угла альфа относительно прилежащего диагонали куба ребра. Диагональ куба имеет три прилежащих ребра, объединённых с ней единой вершиной. Достроив симметричные кубы, относительно этих трёх прилежащих рёбер, получим следующую конструкцию из четырёх кубов (рис справа).
Таким образом, я получил значение угла альфа относительно прилежащего диагонали куба ребра. Диагональ куба имеет три прилежащих ребра, объединённых с ней единой вершиной. Достроив симметричные кубы, относительно этих трёх прилежащих рёбер, получим следующую конструкцию из четырёх кубов (рис справа).
На иллюстрации видно, что вертикальное ребро жёлтого цвета делит угол между двумя кубическими диагоналями синего цвета ровно пополам, то есть угол между синими осями равен 2α=109,47122063494 ̊
Учитывая тот факт, что конструкция создавалась методом симметричного построения относительно прилежащих к диагонали рёбер, имеющих общую вершину, все четыре диагонали находятся под углом 2α=109,47122063494 ̊ друг к другу.
Получаем правильную симметричную четырёхосную систему координат с началом в точке пересечения диагоналей кубов, которые и являются осями системы.
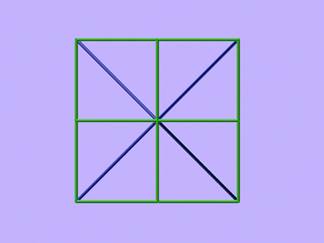
 Примечание: На всех ортогональных проекциях данная конструкция выглядит абсолютно одинаково изображённым на иллюстрации справа образом, то есть диагональные оси, изображённые здесь синим цветом расположены под углом 90 градусов друг к другу на всех шести ортогональных проекциях, но мне точно известен факт что данное значение не соответствует действительности. Следовательно, трёхмерная система координат не способна адекватно отобразить полученную конструкцию из-за наличия «слепых зон», вследствие чего не является совершенной.
Примечание: На всех ортогональных проекциях данная конструкция выглядит абсолютно одинаково изображённым на иллюстрации справа образом, то есть диагональные оси, изображённые здесь синим цветом расположены под углом 90 градусов друг к другу на всех шести ортогональных проекциях, но мне точно известен факт что данное значение не соответствует действительности. Следовательно, трёхмерная система координат не способна адекватно отобразить полученную конструкцию из-за наличия «слепых зон», вследствие чего не является совершенной.

Четырёхосная система координат выглядит изображённым на иллюстрации слева образом.
Оси зелёного цвета, берут начало в точке «0», и пронзают пространство в вычисленных выше по тексту направлениях. Примечательно, что на иллюстрации изображена положительная область системы. Продлив оси сквозь начало системы «0», получаем отрицательную область.
Таким образом, система делит пространство на четыре положительных пространственных сектора: 0АБВ; 0АБГ; 0АВГ и 0БВГ, и на четыре аналогичных отрицательных (отсутствующих на иллюстрации в виду наглядности). Отличие положительной и отрицательной областей системы лежит лишь в противоположности направлений осей. Отрицательная область системы аналогична положительной области, но развёрнута на 180 ̊.
Преимущество четырёхосной системы координат в том, что она не имеет очевидных слепых зон в отличие от трёхмерной, а так же включает в себя понятие плотности пространства следующим образом:
Плотность пространства по мере приближения к центру системы «0», увеличивается в положительной области, и уменьшается в отрицательной. Следовательно, четырёхосная система координат более совершенная по отношению к трёхмерной (трёхосной) системе. Четырёхосная система координат не предусматривает линейных искажений, характерных трёхосной системе, а формирует точное перспективное изображение объектов.

На приведённых выше иллюстрациях представлены ортогональные проекции одного объекта, с одной и той же точки наблюдения. Очевидность различия изображений налицо. Левая иллюстрация представляет собой наиболее точное и естественное изображение объекта, и наглядно указывает на сложность его конструкции. Правое же изображение представляет тот же объект в линейном искажении, согласно трёхмерной проекции, и не отображает сложность его конструкции. В действительности представленный объект в виде трёхмерной ортогональной проекции, невооружённым глазом наблюдать не представляется возможным, так как в таком случае он должен быть удалён от наблюдателя на расстояние равное бесконечности, лишь при этих условиях, представленный объект будет развёрнут к наблюдателю под углом всех его граней кратно 90 градусам.
Таким образом выявляется наглядное отличие и преимущество четырёхосной системы от предшественницы – трёхосной Декартовой системы координат.
|
из
5.00
|
Обсуждение в статье: Четырёхосная система координат |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы