 |
Главная |


АЛГОРИТМ РЕАЛИЗАЦИЯ И РЕШЕНИЕ СИСТЕМЫ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ
|
из
5.00
|
Реализация и решение системы дифференциальных уравнений описывающих динамическую систему позиционного гидропривода, в программе Matlab, выполнялось по следующему алгоритму:
1. Составление вычислительного блока для решения одномассовой матмодели позиционного гидропривода.
2. Введение в модель, подмодели гидравлического силового контура в составе которого участвуют гидрораспределители ВР, Р2 и Р3 с релейной схемой включения (учитывая реальное время срабатывания ^р=0,002.. Д003с) [2].
3. Введение в модель, подмодели гидравлического контура управления с гидролининиями связи - распределителя Р4, с квази-релейной схемой переключения.
4. Интеграцию в КГУ, модели гидравлического устройства управления - ГУКа, с аппроксимацией зависимости µ=f(x) соответствующей реальным гидродинамическим процессам, полученную с учетом динамических характеристик измерительных устройств [6].
5. Выбор метода решения системы дифференциальных уравнений математической модели и соответствующего размера шага.
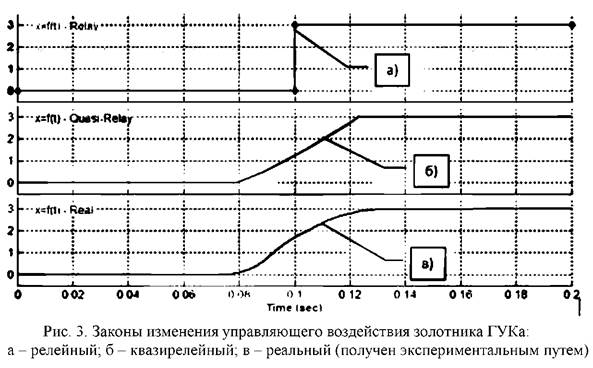
При решении дифференциальной системы уравнений, для исполнительного элемента КГУ - гидроуправляемого клапана, вначале использовались релейный (рисунок За), квази-релейный (рисунок Зб) и на завершающей стадии - реальный законы (рисунок Зв) перемещения управляющего элемента (золотника).
Таблица 1 - Параметры устройств КГУ
| № п/п | Параметры | Обозначе ние | Размерность | Диапазоны изменения |
| Площадь проходного сечения распределителя | Sp | М2 | 0-0,0000785 | |
| Коэффициент расхода распределителя | µз | 0,8 | ||
| Проводимость управляющего распределителя | Кур | 1Д3-10-4 | ||
| Жесткость пружины ГУКа | Спр | Н/м | ||
| Предварительное натяжение пружины ГУКа | Х0 | м | 0,0095 | |
| Давление контура гидравлического управления | Ру | Па | 1,6-6,3-106 | |
| Расход через ВР | Qвр | М3/с | 0,0015-0,0138 |
Исходные данные, принятые для моделирования позиционного гидропривода приведены в таблице 2. Исследования проводились при различных диапазонах функционирования гидромеханической системы привода. Был определен базовый режим работы, характерный для большинства поворотно-делительных механизмов АТО.
В результате выполненной отладки и апробации вычислительных блоков программы, реализованной в подсистеме Simulink, получены осциллограммы зависимостей выходных параметров: φ, ω - механической подсистемы, а так же задающих воздействий- хГУК и xP2, xP4 - перемещения управляющих элементов КГУ.
Конфигурация интерфейса составленной программы позволила работать в диалоговом режиме, варьируя исходные данные (приведенные в Таблице 2), осуществлять выбор структуры задачи и мониторинг выходных характеристик. В ходе математического эксперимента, проводилась оценка погрешностей и статистическая обработка полученных численных данных по известной методике [7].
После каждого математического эксперимента, его результаты автоматически образовывали массив данных, со следующими параметрами:

Движение одномассовой механической подсистемы, характеризует фазовый портрет координаты перемещения выходного звена (рис.3). Движение приведенных масс /, в момент завершения процесса позиционирования, сопряжено с колебаниями (0,37 c), которые благодаря включению гидромеханического тормозного устройства - гасятся, в области Δφ.
Таблица 2 - Исходные данные для моделирования ПГП
| №№ | Параметры | Обозна | Размер- | Диапазоны | Базовый |
| п/п | чение | ность | изменения | режим | |
| Скорость | ωi | Рад./с | 5-20 | ||
| Обобщенная сила сухого трения гидродвигателя | Мт01 | Н·м | 1-8 | 4,5 | |
| Обобщенная сила гидромеханического тормоза | Мтз(t) | Н·м | 10-100 | ||
| Основной конструктивный параметр гидродвигателя | м3/рад | 3*10-6-25*10-6 | 5,57*10-6 | ||
| Коэффициент вязкого трения гидродвигателя | Ктм | Н·мс/рад | 0,05-0,35 | 0,11 | |
| Приведенный коэффициент жесткости | Cω | Н·м/рад | 0-15000 | ||
| Перемещаемые ведущие массы | J1 | кг м2 | 39*10-4-0,024 | 0,0034 | |
| Приведенный момент инерции | Jп | Н·м·с2 | 0,01-0,1 | 0,033 | |
| Давление насоса | Рн | Па | 1,5*106-6,3*106 | 5,5*106 | |
| Давление в сливой гидролинии | Рсл | Па | 0,5*106-1,5*106 | 0,5*106 |
|
из
5.00
|
Обсуждение в статье: АЛГОРИТМ РЕАЛИЗАЦИЯ И РЕШЕНИЕ СИСТЕМЫ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы