 |
Главная |


Расчет пусковых характеристик с учетом влияния вытеснения тока и насыщения от полей рассеяния
|
из
5.00
|
61. Индуктивные сопротивления обмоток:
Принимаем kнас=1.35



для BФδ=2.49 Тл κδ=0.8.
Коэффициент магнитной проводимости пазового рассеяния обмотки статора с учетом влияния насыщения:




Коэффициент магнитной проводимости дифференциального рассеяния обмотки статора с учетом влияния насыщения:

Индуктивное сопротивление фазы обмотки статора с учетом влияния насыщения:

Коэффициент магнитной проводимости пазового рассеяния обмотки ротора с учетом влияния насыщения и вытеснения тока:

где hш2=hш’+hш=1+0.7=1.7


Коэффициент магнитной проводимости дифференциального рассеяния ротора с учетом влияния насыщения:

Приведенное индуктивное сопротивление фазы обмотки ротора с учетом влияния эффекта вытеснения тока и насыщения:


62. Расчет токов и моментов:




Кратность пускового тока с учетом влияния эффекта вытеснения тока и насыщения:

Кратность пускового момента с учетом влияния эффекта вытеснения тока и насыщения:

Полученный в расчете коэффициент насыщения:

Для расчёта других точек характеристики задаёмся kНАС, уменьшенным в зависимости от тока I1 . Принимаем при:
s = 0.8 kНАС. = 1.3
s = 0.5 kНАС. = 1.2
s = 0.2 kНАС. = 1.1
s = 0.1 kНАС. = 1.05
Критическое скольжение определяем после расчёта всех точек пусковых характеристик по средним значениям сопротивлений х1НАС. и х¢2x НАС, соответствующим скольжениям s = 0.2 ¸ 0.1. Результаты расчета сведены в табл. 3
Таблица 3
| № п/п | Расчетные формулы | Разм-ть | Скольжение, S | |||||
| 0.8 | 0.5 | 0.2 | 0.1 | Sкр=0.12 | ||||
| kНАС | - | 1.35 | 1.3 | 1.2 | 1.1 | 1.05 | 1.06 | |
| FП. СР. | A | |||||||
| BФd =(FП.СР.*10-6) / (1,6*d*CN) | Тл | 2.491 | 2.37 | 2.126 | 1.731 | 1.326 | 1.338 | |
| Kd = ¦( BФd) | - | 0.8 | 0.83 | 0.86 | 0.92 | 0.96 | 0.96 | |
| сЭ1 = (tZ1 - bШ1)(1-кd ) | мм | 2.38 | 2.023 | 1.666 | 0.952 | 0.476 | 0.476 | |
| lП1 НАС. = lП1 - DlП1 НАС. | - | 1.251 | 1.274 | 1.298 | 1.354 | 1.399 | 1.399 | |
| lД1 НАС. = кd *lД1 | - | 0.892 | 0.925 | 0.959 | 1.026 | 1.07 | 1.06 | |
| х1 НАС. = х1*ål1 НАС. /ål1 | Ом | 0.387 | 0.39 | 0.393 | 0.4 | 0.405 | 0.404 | |
| c1П. НАС. = 1+х1 НАС. /х12П | - | 1.015 | 1.015 | 1.015 | 1.015 | 1.016 | 1.016 | |
| сЭ2 = (tZ2 - bШ2)(1 - Kd ) | мм | 3.755 | 3.191 | 2.628 | 1.502 | 0.751 | 0.704 | |
| lП2x НАС. = lП2x -DlП2 НАС. | - | 1.48 | 1.519 | 1.568 | 1.723 | 1.912 | 1.875 | |
| lД2 НАС. = Kd *lД | - | 1.011 | 1.049 | 1.087 | 1.163 | 1.213 | 1.213 | |
| х¢2x НАС=х¢2*ål2x НАС. ål2 | Ом | 0.308 | 0.313 | 0.318 | 0.333 | 0.349 | 0.347 | |
| RП. НАС. = r1+c1П. НАС.·r¢2x/s | Ом | 0.208 | 0.23 | 0.297 | 0.562 | 1.004 | 0.857 | |
| XП.НАС=х1НАС.+с1П.НАС.*х¢2xНАС | Ом | 0.7 | 0.708 | 0.716 | 0.738 | 0.76 | 0.758 | |
| I¢2НАС=U1/(RП.НАС2+ХП.НАС2)0,5 | А | 301.26 | 295.53 | 283.81 | 237.17 | 174.71 | 192.28 | |
| I1 НАС=I¢2 НАС·(RП.НАС2+(ХП. НАС+х12П) 2) 0,5/ (c1П.НАС·х12П) | А | 304.86 | 299.16 | 287.39 | 240.4 | 177.14 | 177.1 | |
| k¢НАС. = I1 НАС. /I1 | - | 1.277 | 1.22 | 1.14 | 1.07 | 1.03 | 1.04 | |
| I1 * = I1 НАС. /I1 НОМ | - | 4.36 | 4.27 | 4.1 | 3.44 | 2.53 | 2.83 | |
| М *=(I¢2НАС/I¢2НОМ)2· КR(sHОМ/s) | - | 1.307 | 1.384 | 1.559 | 2.053 | 2.224 | 2.281 |
| I* |
| M* |
| Рис. 4 |
| Sкр |


Пусковые характеристики спроектированного двигателя с короткозамкнутым ротором (рис. 4):
M*max=2.381; 2p=2; U1ном=220/380 В; Mп*=1.307; Iп*=4.36
Спроектированный асинхронный двигатель удовлетворяет требованиям ГОСТ как по энергетическим показателям (η и cosφ) так и по пусковым характеристикам.
Специальная часть.
Регулирование частоты вращения асинхронного двигателя.
Виды регулирования.
В процессе работы многих машин и механизмов требуется регулирование скорости их движения. К ним относятся электрический транспорт, лифты, станки, электроинструмент и др. В последнее время традиционно нерегулируемые электроприводы заменяют регулируемыми в целях снижения потребления ими электрической энергии. При этом наибольший эффект достигается, если двигатель работает с переменной нагрузкой. Задача стабилизации скорости вращения решается теми же методами, что и задача ее регулирования.
Существуют три способа регулирования скорости вращения ротора асинхронных двигателей:
1) Регулирование частоты питающего напряжения;
2) Изменение числа полюсов;
3) Воздействие на скольжение.
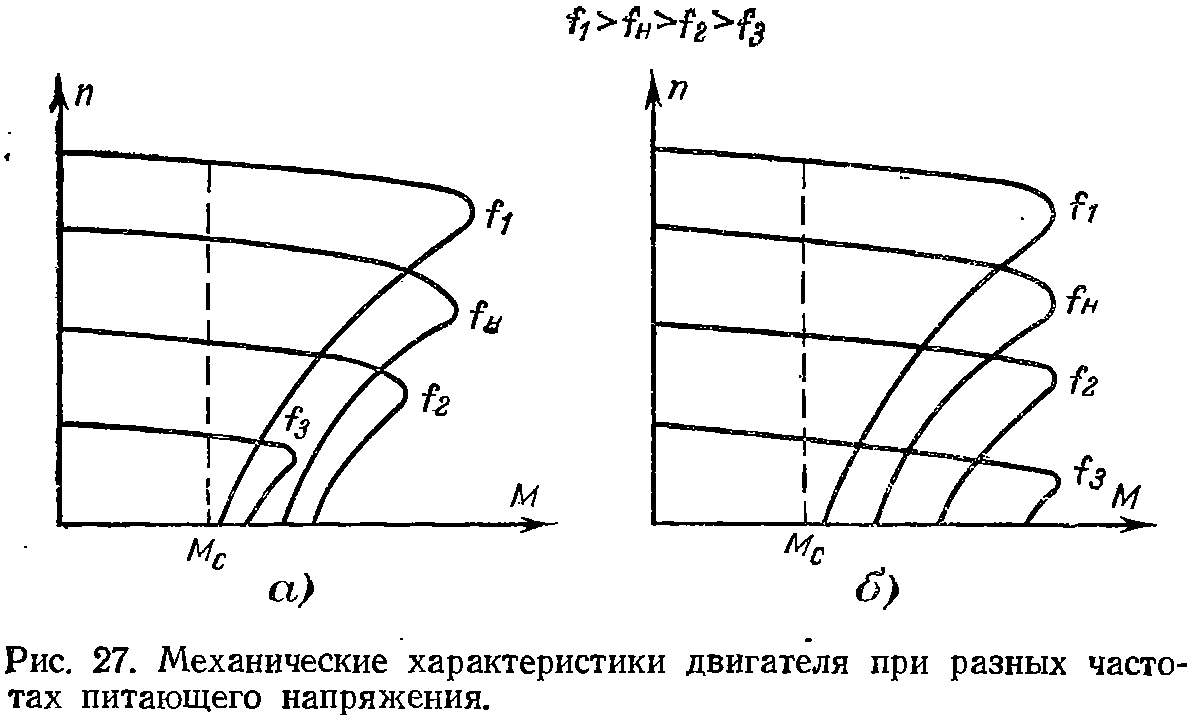
Наиболее перспективным способом регулирования частоты вращения является частотный. Изменение частоты, подводимой к двигателю, осуществляется преобразователем частоты. При частотном регулировании изменяется синхронная частота вращения, а двигатель работает с небольшим скольжением. Регулирование экономичное, однако через преобразователь частоты проходит вся мощность, и габариты преобразователя частоты превышают габариты двигателя. При преобразовании частоты и напряжения сети преобразователь частоты изменяет напряжение и частоту на выходе по закону

что обеспечивает работу асинхронного двигателя при постоянном магнитном потоке.
Регулировать частоту можно и в статоре, и в роторе. В двигателях большой мощности удобнее регулировать частоту в роторе, так как при небольших пределах регулирования частоты мощность скольжения значительно меньше мощности обмотки статора. Поэтому преобразователь частоты имеет меньшие габариты. В этом случае мощность в воздушный зазор поступает со стороны статора и ротора. Такие машины получили название асинхронных двигателей двойного питания.
Несмотря на доминирующее положение, частотный привод еще не занял доминирующего положения в регулируемых приводах с асинхронными двигателями. В последнее время в связи с появлением силовых транзисторов при параллельном их соединении появилась возможность создать дешевый малогабаритный преобразователь частоты на мощность в несколько киловатт.

Схема частотного регулирования частоты вращения асинхронного двигателя представлена на рис.28:
Механические характеристики асинхронного двигателя при частотном регулировании представлены на рис.27:
Изменение числа полюсов:
Пути реализации данного способа следующие:
1) Размещение в пазах статора нескольких обмоток с различным числом полюсов. Напряжение питания в этом случае переключается с одной обмотки на другую в зависимости от требуемой скорости. Модификации таких многоскоростных асинхронных двигателей на две, три и даже четыре скорости используются, например, в электроприводах лифтов.
2) Изменение схемы обмотки статора путем переключения ее катушек.
3) Использование так называемой полюсно-амплитудной модуляции, изменяющей схему обмотки. В этом случае в результате наложения полей катушек или катушечных групп изменяется число полюсов результирующего магнитного поля в воздушном зазоре.
Недостатками данного способа являются:
Невозможность плавного регулирования скорости;
Более высокие габаритные размеры, масса и стоимость многоскоростных двигателей по сравнению с односкоростными нерегулируемыми.
Регулирование изменением напряжения:
Момент асинхронного двигателя пропорционален квадрату напряжения на зажимах обмотки статора. Если каким-нибудь регулятором уменьшать напряжение, максимальный момент резко снижается, а критическое скольжение остается неизменным. При этом рабочее скольжение и скорость вращения ротора будут также меняться. Причем у обычного нерегулируемого асинхронного двигателя диапазон изменения скольжения невелик и для его расширения нужно повысить Sкр, т.е. увеличить активное сопротивление обмотки ротора.
Работа асинхронного двигателя при повышенном скольжении неэкономична, так как в этом случае велики потери в обмотке ротора. Поэтому таким способом регулируют скорость вращения ротора в малом диапазоне и только в двигателях небольшой мощности.
Список литературы:
1) В.Я. Беспалов, Н.Ф. Котеленец, «Электрические машины»,М.: Академия, 2006 г.
2) И.П. Копылов «Проектирование электрических машин», М.: Энергоатомиздат , 1993г. в 2-х томах.
3) И.П. Копылов «Электрические машины», М.: Высшая школа, 2000 г.
|
из
5.00
|
Обсуждение в статье: Расчет пусковых характеристик с учетом влияния вытеснения тока и насыщения от полей рассеяния |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы