 |
Главная |


Кинематический анализ главного механизма
|
из
5.00
|
Структурный анализ главного механизма
На рис. 1 представлена структурная схема исследуемого механизма с тремя подвижными звеньями.
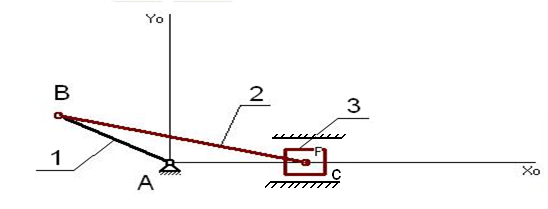
Рисунок 1- Схема механизма: 1 – кривошип; 2 – шатун;; 3 – ползун; А – стойка.
Пассивных звеньев в представленном механизме нет.
В данном механизме четыре кинематические пары:
А-1 – Вращательная (Р5);
1-2 – Вращательная (Р5);
2-3 – Вращательная (Р5);
3-С – Поступательная (Р5).
Число степеней свободы определяется по формуле Чебышева:
W=3·N–2·P5–P4=3·3–2·4–0=1,
где N – число подвижных звеньев; P5 – количество пар 5-ого порядка; P4 – количество пар 4-ого порядка.
Исходные данные для построения рычажного механизма:
АВ=0,5 (м); ВС=1 (м); массы стержней: m1=4, m2=8 .

Структурное деление механизма:
Входное звено рис. 2 – Кривошип.
W=3·1–2·1=1.
Рисунок 2 – Входное звено
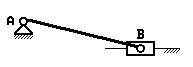
 Структурная группа рис. 3 Ш-Ш-П.
Структурная группа рис. 3 Ш-Ш-П.
W=3·2–2·3=0.
Выбор двигателя и типа передачи. Кинематический расчёт привода
Исходные данные для выбора двигателя: количество оборотов N=1000 об/мин. Исходя из выбранных исходных данных был выбран короткозамкнутый асинхронный трехфазный двигатель серии 4А. Тип двигателя 4AA63B6Y3. Номинальная мощность данного двигателя P=0,25 кВт, η=0,69%, сosφ=0,79.
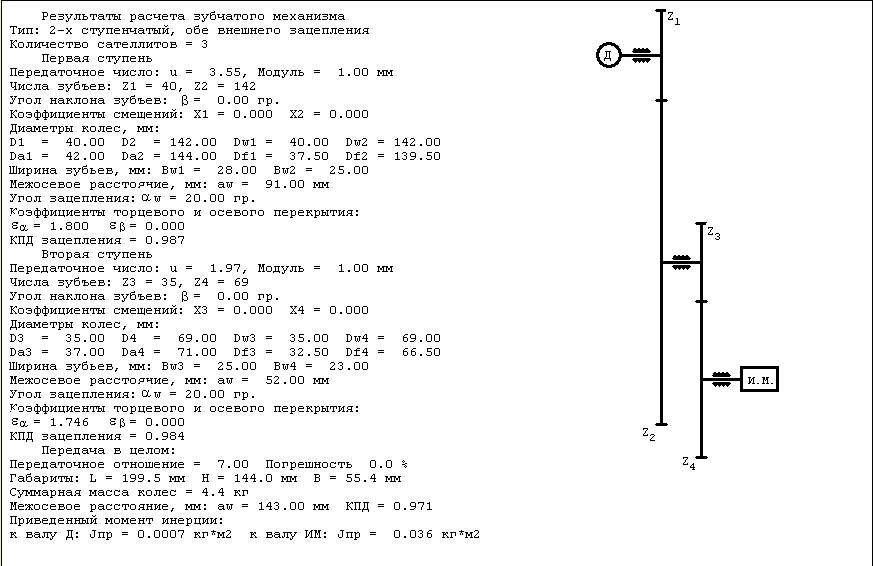 Так же была выбрана цилиндрическая прямозубая 2-х ступенчатая зубчатая передача, как наиболее простая в изготовлении и эксплуатации (расчеты и схемы представлены на рис. 4).
Так же была выбрана цилиндрическая прямозубая 2-х ступенчатая зубчатая передача, как наиболее простая в изготовлении и эксплуатации (расчеты и схемы представлены на рис. 4).
Рисунок 4 – Результаты расчета зубчатого механизма.
Кинематический анализ главного механизма
Все методики расчётов реализованы в виде пакетов прикладных программ. В соответствии с этим рассматривается варианты решения задачи кинематики, ориентированных на пакет «Mechanic».
Приведём пример решения задачи кинематического анализа методом векторных контуров, суть которого состоит в следующем. Звенья механизма представляют в виде векторов. Поскольку в данном случае механизм замкнут через стойку, то эти векторы образуют замкнутые контуры. Записывают уравнение замкнутости векторных контуров. Выбирают удобную систему координат и на её оси проецируют уравнения замкнутости, получая тем самым систему уравнений для определения параметров, характеризующих положение звеньев. Далее эти системы уравнений последовательно дважды дифференцируются по времени, получая тем самым уравнения для вычисления скоростей и ускорений.
Пример 1.
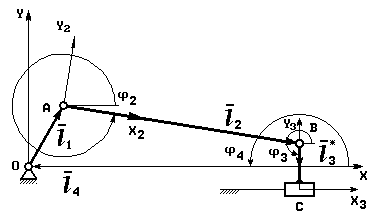
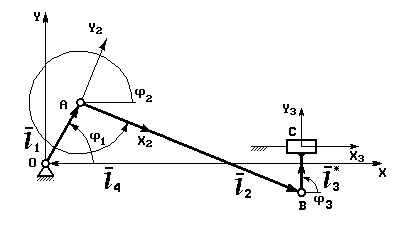 Механизм, состоящий из входного звена OA и структурной группы типа "шатун-ползун" представлен на рис. 5.1, 5.2. Ось X неподвижной системы координат OXY направлена параллельно оси ползуна. Смещение l3, показанное на рис. 5.1 будем считать положительным, а на рис. 5.2 – отрицательным.
Механизм, состоящий из входного звена OA и структурной группы типа "шатун-ползун" представлен на рис. 5.1, 5.2. Ось X неподвижной системы координат OXY направлена параллельно оси ползуна. Смещение l3, показанное на рис. 5.1 будем считать положительным, а на рис. 5.2 – отрицательным.
Рисунок 5.1 – Схема механизма
Уравнение замкнутого векторного контура:
l1 + l2 + l3 + l4 = 0 .
Проецируя его на оси неподвижной системы координат OXY, получим:
| ( 2.17 ) |
 l1 sin j1 + l2 sin j2 + l3 sin j3 + l4 sin j4 = 0.
l1 sin j1 + l2 sin j2 + l3 sin j3 + l4 sin j4 = 0.
Рисунок 5.2 – Схема механизма
Угол j4= 180O = Const. Угол j3 также не меняется, но зависит от направления смещения точки B: j3 = 90О на рис. 2.9, j3 = 270O на рис. 5.1. Обозначим:
l3* = l3 sin j3 ,
учитывая, что l1cos j1 = xA, l1sin j1 = yA – координаты входного шарнира, систему ( 2.17 ) запишем в виде:
| ( 2.18 ) |
yA + l2 sin j2 + l3* = 0.
Так как при заданных кинематических параметрах движения входного звена угол j1, а, следовательно и xA, yA известны, то эта система легко решается относительно неизвестных j2, l4
| ( 2.19 ) |
l4 = xA + l2 cos j2 .
Дифференцируя систему ( 2.18 ) по времени, получим:
| ( 2.20 ) |
VAy + l2 w2 cos j2 = 0.
где: VAx, VAy – проекции скорости входного шарнира A на оси НСК OXY.
Тогда угловая скорость шатуна и скорость ползуна:
| ( 2.21 ) |
VB = VAx – l2 w2 sin j2 .
Дифференцируя ( 2.20 ) по времени, получим систему уравнений для определения ускорений:
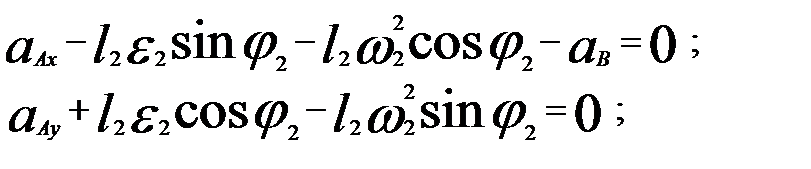
где: аAx, аAy – проекции ускорения входного шарнира A на оси НСК OXY (см. уравнение (2.16) .
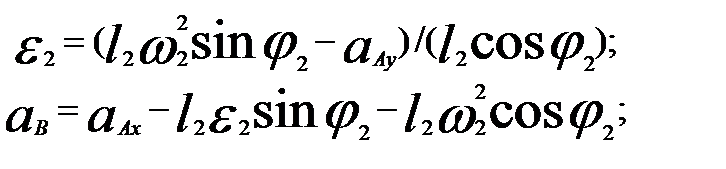
Тогда угловое ускорение шатуна и ускорение ползуна:
| ( 2.22 ) |
Рассмотренный метод реализован в пакете прикладных программ «ТММ_КР».
Частота вращения кривошипа:
n=730 об/мин;
Угловая скорость кривошипа:
ω=π·n/30=76,4 рад/с;
Время оборота кривошипа:
Т= 2· π/ ω =0,1 с.
Ввиду конструкторских соображений, типом движения данного механизма была выбрана безударная трапеция (рис. 5)
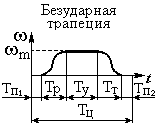
Рисунок 5 – Характер движения: ωm - максимальная угловая скорость, Тр - время разгона, Ту – время установившегося движения, Тц – время торможения, Тп – время паузы, Тц – время цикла
Характеристики движения были выбраны: Тр=1; Ту=1; Тц=1.
На рис. 6 представлены планы механизма для 18 положений для исследуемого рычажного механизма:
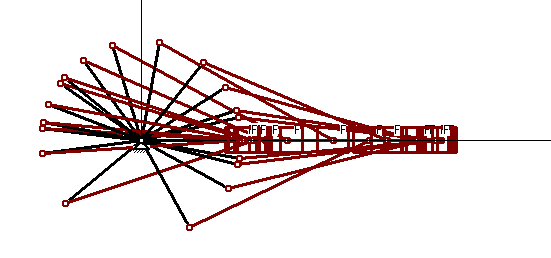
Рисунок 6 – Планы механизма
|
из
5.00
|
Обсуждение в статье: Кинематический анализ главного механизма |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы