 |
Главная |


Определение передаточного отношения привода расчет силовых и кинематических параметров привода выбор редуктора
|
из
5.00
|
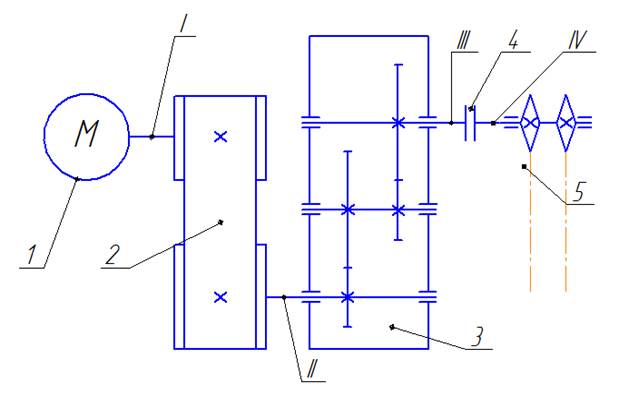
Разработка кинематической схемы привода
В соответствии с комплексным техническим заданием, составляю кинематическую схему привода, используя кинематические обозначения – ГОСТ 2.105-95:
| |
| |
| |
| |
| |
| |
| |
1Электродвигатель;
2Ременная передача;
3Редуктор цилиндрический 2-х ступенчатый;
4Муфта зубчато-фрикционная;
5Исполнительный механизм – приводные звездочки;
Определение мощности на валу исполнительного органа
Мощность Р4, на валу исполнительного механизма вычисляется по формуле

где Ft – окружное усилие на исполнительном механизме, Н;
Vt – окружная скорость исполнительного механизма, м/с;
 Нм/с.
Нм/с.
Определение расчетной мощности на валу двигателя
Расчётная мощность Р1 на валу двигателя определяется по мощности на валу исполнительного механизма с учётом потерь в приводе

где  – общий КПД привода
– общий КПД привода

 =0,972 – КПД цилиндрического трехступенчатого редуктора;
=0,972 – КПД цилиндрического трехступенчатого редуктора;
 =0,95 – КПД ременной передачи;
=0,95 – КПД ременной передачи;
 =0,98 – КПД муфты
=0,98 – КПД муфты 
Тогда
 Нм/с.
Нм/с.
Определение частоты вращения вала исполнительного механизма
Частота n4 вращения вала исполнительного механизма, вычисляется по формуле

где z – число зубьев,  - окружная скорость вращения (даны в техническом задании).
- окружная скорость вращения (даны в техническом задании).
 мин-1.
мин-1.
Выбор электродвигателя
Для этого определим частоту вращения вала электродвигателя

 мин-1.
мин-1.
Для расчетной мощности на валу Рпотр=2298,9 Вт и частоты вращения  952,2 мин-1 определяю тип электродвигателя. Наиболее подходящим является двигатель АИР 112МА6/950, с мощностью 3 кВт, синхронной частотой 950 мин-1.
952,2 мин-1 определяю тип электродвигателя. Наиболее подходящим является двигатель АИР 112МА6/950, с мощностью 3 кВт, синхронной частотой 950 мин-1.


Рисунок 2 – Габаритные и присоединительные размеры электродвигателя АИР 112МА6/950 IM1081
Таблица 1 – Размеры электродвигателя, мм
| l1 | l31 | l10 | l30 | d30 | h31 | h | h10 | d10 | b10 | b1 | h1 | h5 | d1 |
Определение передаточного отношения привода расчет силовых и кинематических параметров привода выбор редуктора
На начальном этапе проектирования известны частоты n1 и n4 и мощности Р1 и Р4 валов двигателя и исполнительного механизма.
Уточним передаточное отношение привода:


Находим передаточное отношение ременной передачи:

Находим угловые скорости:



Находим частоты вращения:


Находим мощности:




Находим вращающие моменты:




Для обеспечения расчетного вращающего момента на валу T3=1208,7 Нм и передаточного отношения iред=25 определяю тип 2-х ступенчатого цилиндрического редуктора. Наиболее подходящим является редуктор Ц2У-200 – 25 с номинальным вращающим моментом на выходном валу 2000 Нм и фактическим передаточным числом 25,88 [ анурьев].
Таблица 2 - Силовые и кинематические параметры привода
| № Вала | Мощность P, Вт | Частота вращения n, мин-1 | Вращающий момент T, Нм | Угловая скорость Ɯ, с^(-1) |
| 2298.9 | 23.1 | 99.5 | ||
| 2183.9 | 395.8 | 52.6 | 41.5 | |
| 2054.8 | 15.8 | 1208.7 | 1.7 | |
| 15.8 | 1176.5 | 1.7 |


Рисунок 3 – Эскиз редуктора


Рисунок 4 – эскиз концов валов редуктора
Таблица 3 – Размеры редуктора, мм
| awБ | awТ | А | А1 | В | B1 | Н | Н1 | Н2 | L1 | L2 | L3 | L4 |
| L5 | L6 | L7 | b1 | b2 | d1 | d2 | d3 | d4 | d5 | d6 | d7 | d8 | h1 | h2 | h3 |
| М20х1.5 | М48xЗ | М24х1.5 |
| l1 | l2 | l3 | l4 | t1 | t2 |
| 7,5 |
2. ПРОЕКТИРОВАНИЕ ИСПОЛНИТЕЛЬНОГО ОРГАНА
2.1. Проектный расчет вала
Принимаем минимальный диаметр вала равным диаметру выходного конца редуктора. d = 70 мм.
| |


где t2– глубина паза в ступице, мм, t2 = 3,3 мм.

для более лучшего торцевого фиксирования муфты примем : dП = 80 мм.
Диаметр буртика для подшипника № 1216 по ГОСТ 20226-82 примем dБП = 80+3r=90 мм:
Диаметр цапф вала в местах установки звездочек примем: dст = 90+3f=100 мм.
Длину ступицы примем:

Наружный диаметр ступицы примем:

2.2. Подбор подшипников и шпонок.
Исходя из геометрических параметров муфты и вала под муфтой, определяем размеры шпонки вала под муфту:
Шпонка призматическая для диаметра вала d = 70 мм:
- высота шпонки h = 12 мм;
- ширина шпонки b = 20 мм;
- длина шпонки l = 56 мм.
- глубина, вал t1 =7.5 мм
- глубина, муфта t2 = 4.9 мм 
Рисунок 5 – Эскиз шпоночного соединения.
Для опор вала исполнительного органа применим шариковые радиальные сферические двухрядные подшипники (ГОСТ 28428 – 90), из-за возможных перекосов опор подшипников. Назначаем подшипники легкой серии № 1216.
- диаметр отверстия dП = 80 мм;
- диаметр внешнего кольца D = 140 мм;
- ширина подшипника В = 26 мм;
- координата фаски r = 3 мм;
- динамическая радиальная грузоподъёмность Cr = 40,0 кН;
- статическая радиальная грузоподъёмность C0r = 23,6 кН.

Рисунок 6 – Эскиз подшипника.
2.3. Проверочный расчет вала на статическую прочность
по эквивалентному моменту
Проверочный расчет вала ведется по максимальному эквивалентному моменту.
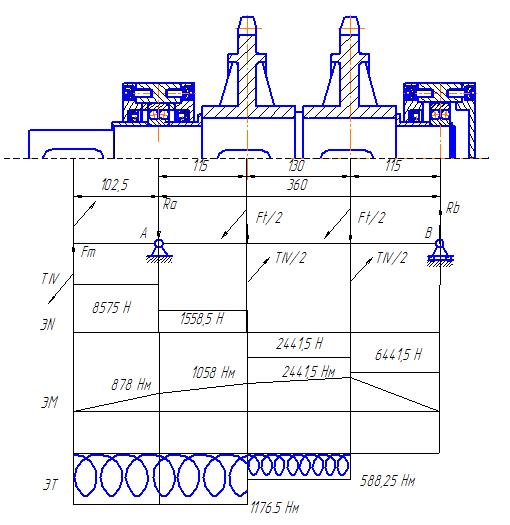
Рисунок 7 - Схема нагружения вала исполнительного органа
Найдем реакции в опорах.


Найдем значения изгибающих и крутящих моментов:

Эквивалентное напряжение в опасном сечении определяется как
 Нм
Нм
Сравним полученное значение эквивалентного напряжения с допускаемым:

Условие выполняется.
2.4. Проверочный расчет подшипников на долговечность
| |
Pr = VXFrKБKТ,
где V – коэффициент внутреннего кольца, V = 1;
Х – коэффициент радиальной нагрузки, Х = 1;
КТ – температурный коэффициент, КТ = 1;
КБ – коэффициент безопасности, КБ = 1,2.
Pr = 1.1.7160,1.1,2 = 8592,12 Н.
Определяем по уровню надёжности и условиям применения расчётный ресурс подшипника:
| |

;

Сравниваем с требуемым ресурсом  = 10000, ч:
= 10000, ч:

Условие выполняется, следовательно подшипник 1216 – годен.
2.5. Проверочный расчет шпоночного соединения
Условие работоспособности шпонки
 ,
,
где Т=1176,5 Нм – передаваемый момент.
Шпонка для диаметра d=70 мм:
lр – рабочая длина шпонки, l=56мм;
k – глубина врезания шпонки k=12 мм;
[σсм]=100 МПа – допускаемое напряжение смятия;
 .
.
Условие выполняется.
Шпоночное соединение показано на рисунке 6.
Для диаметра вала под посадки звездочек, брать шпонки больших размеров не имеет смысла, так как в них действуют меньшие силы. Возьмем рекомендуемое сечение шпонки с той же самой длиной.
3. РАССЧЕТ ОТКРЫТОЙ ПЕРЕДАЧИ
Ременные передачи являются одними из старейших и широко применяются в машиностроении. Передача ими вращающего момента основана на использовании силы трения между ремнем и шкивом (за исключением зубчатоременных передач).
Ременная передача в простейшем виде состоит из двух шкивов, закрепленных на валах, и надетого с натяжением на шкивы ремня. Ведущий шкив при вращении благодаря силам трения на поверхности контакта ремня со шкивом, возникающим за счет натяжения ремня, приводит в движение ремень, который при этом заставляет вращаться ведомый шкив, тем самым обеспечивая передачу мощности с одного вала на другой.
По сравнению с другими видами передач ременные имеют ряд существенных преимуществ:
1. Возможность передачи движения на сравнительно большие расстояния без особого увеличения массы передачи;
2. Простота конструкции и эксплуатации;
3. Плавность хода и бесшумность работы;
4. Эластичность привода, смягчающая колебания нагрузки и предохраняющая от значительных перегрузок за счет скольжения;
5. Меньшая начальная стоимость.
Следует отметить и недостатки, присущие ременным передачам:
1. Сравнительно небольшие передаваемые мощности (обычно до 50 кВт);
2. Непостоянство передаточного отношения (за исключением зубчатоременных передач);
3. Значительные габариты;
4. Повышенные нагрузки на валы и опоры;
5. Необходимость натяжения ремня в процессе эксплуатации;
6. Малая долговечность ремней, особенно в быстроходных передачах.

Рисунок 8 – Геометрия клиноременной передачи
Исходные данные: P = 2298.9 Вт; ω1 = 99,5 рад/с; ω2 = 41.5 рад/с; I = 2.4; n1=950 мин^(-1).
Примем клиновые ремни иормальиого сечения кордтканевые (ГОСТ1284.3-80).
Диаметры шкивов: диаметр меньшего шкива возьмем согласно рекомендации ГОСТ 1284.3 — 80 d1 = 125 мм; определим диаметр большего шкива:

Этот диаметр соответствует ГОСТ 1284.3
Расстояние между центрами шкивов при C=1.2 :

Расчетная длина ремней (приблизительная):

По ГОСТ 1284.3—80 принимаем ремни сечения А.
Действительное межосевое расстояние, т. е. соответствующее принятой длине ремней:

Угол обхвата ремнем меньшего шкива:

Скорость ремня:

Число z ремней определим из расчета передачи по тяговой способности:

Примем z = 2.. Проверим ремни на долговечность по частоте пробегов в секунду:

что вполне допустимо.
Определим размеры шкивов, приняв, что они изготовлены из чугуна СЧ15. Размеры канавок для ремней примем по ГОСТ 20898 — 80 для обоих шкивов с = 3,5 мм, е = 15 мм, t = 16 мм, s = 10 мм; для меньшего шкива φ1 = 34°,φ2 = 36. Наружный du и внутренний dB диаметры шкивов:
меньшего шкива:


большего шкива:


Ширина ободов шкивов:

Наружный диаметр dB и длина I ступицы:
меньшего шкива:


большего шкива:


Обод шкива для приводных клиновых ремней нормальных и узких сечений показан на рисунке 5. Обод шкива для приводных клиновых ремней нормальных и узких сечений показан на рисунке 5. Размеры конструктивных элементов канавок под ремни и толщина обода Sравны: Wp=11 мм, bmin=3,3 мм, hmin=8,7 мм, e=15 мм,f=10 мм,r=1 мм.

Рисунок 9 – Эскиз шкива
Для компенсации вытяжки ремней в процессе эксплуатации, компенсации отклонений длины бесконечных ремней должно быть предусмотрено натяжное устройство для регулировки межосевого расстояния передачи.
Применяют натяжные устройства, состоящие из двух плит: неподвижной, которую крепят к полу цеха, и перемещающейся по неподвижной при регулировании натяжения ремней. При единичном производстве плиты делают из стальных листов (рисунок 6).
Электродвигатель крепят к верхней плите винтами 1. Для винтов 2 в верхней плите выполнены удлиненные пазы, а в нижней —резьбовые отверстия. По окончании регулирования винты 2 затягивают. Перемещают верхнюю плиту по нижней толкающими винтами 3.

Рисунок 10 – Натяжное устройство
4 Проектирование комбинированной муфты
4.1 Проектирование зубчатой полумуфты
Учитывая диаметр вала  и номинальный крутящий момент
и номинальный крутящий момент  выберем муфту по ГОСТ 20884-93. Получаем [T]=4000 Нм, nmax=6300об/мин.,
выберем муфту по ГОСТ 20884-93. Получаем [T]=4000 Нм, nmax=6300об/мин.,  ,D1=150, D2=95, L=220,
,D1=150, D2=95, L=220,  , зубья m=2,5, b=15, z=38.Проверим выбранную муфту по условию:
, зубья m=2,5, b=15, z=38.Проверим выбранную муфту по условию:
Tном·к1·к2  ,
,
где к1 – коэффициент ответственности передачи; к1=1;
к2 – коэффициент режима работы; к2=1.2.


9 МПА  12 МПа
12 МПа

Рисунок 11 – чертеж зубчатой муфты
4.2 Проектирование фрикционной полумуфты
Диаметр вала d = 70мм.
Наружный диаметр кольца трения:
D = 200 мм
r/R=0.5…0.7
r = 0.6*90 = 53 мм
Rср = (90+53)/2 = 71.5 мм
Осевая сила:
 H
H
Число пар трения:
 ,
,
Принимаем Z = 9.
Проверка:

Определим параметры пружин.


Рисунок 12 – схема расчета пружины
Из условия прочности пружины:
τ=k  ≤[τ],
≤[τ],
где τ – расчетное напряжение в поперечном сечении витка;
k – коэффициент, учитывающий влияние кривизны витков и поперечной силы:
k=  ;
;
где c=D0/d – индекс пружины;
F – сила, сжимающая пружину;
D0 – средний диаметр пружины;
d – диаметр проволоки;
Выразим d:
d≥ 
1) Максимальная рабочая нагрузка:

где n – колличество пружин.
2) Индекс пружины с определим:

где D – средний диаметр пружины;
d – диаметр проволоки.
3) Коэффициент кривизны витков:
k= =  =1,3.
=1,3.
4) Выбор материала пружины:

5) Определим диаметр проволоки:
d= 
6) Средний диаметр пружины:
D = dc = 20мм
7) Определим число рабочих витков:

где X – осевое перемещение пружины; X=15;
G – модуль сдвига; G=8 

8) Полное число витков пружины:

9) Определим длину пружины, сжатой до соприкосновения:

10) Зазор между витками:

11) Регулировочный ход:

12) Ход до соприкосновения витков:

Свободная длина пружины:

Наружный диаметр пружины:


13) Сила, сжимающая пружину до соприкосновения витков:
 .
.
14) Проверка наибольшего фактического напряжения:
τ=k ≤[τ],
Примем: 

τ = 616.7 МПа = 112%[τ]
Допускается перегрузка 20%.
На рисунке 13 приведен чертеж комбинированной муфты.

Рисунок 13 - чертеж комбинированной муфты
Список использованных источников
1. Устиновсий Е.П., Шевцов Ю.А., Яшков Ю.К., Уланов А.Г. Многовариантное проектирование зубчатых цилиндрических, конических и червячных передач с применением ЭВМ: Учебное пособие к курсовому проектировании по деталям машин. – Челябинск: ЧГТУ, 1992.
2. Справочник конструктора - машиностроителя: В 3 т. – 8-е изд., перераб. и доп. Под ред. И. Н. Жестковой. – М.: Машиностроение, 2001.
3. Дунаев П.Ф., Леликов О.П. конструирование узлов и деталей машин: Ученое пособие для техн. спец. вузов. – 6-е изд., исп. – М.: Высш. шк., 2000. – 477с., ил.
4. Ряховский О.А., Иванов С.С. Справочник по муфтам. – Л.: Политехника, 1991. – 384 с.: ил.
5. Сохрин П.П., Устиновский Е.П., Шевцов Ю.А. Техническая документация по курсовому проектировании по деталям машин и ПТМ: Ученое пособие. – Челябинск: Ид. ЮУрГУ, 2001. – 67 с.
6. Чурюкин В.А., Яшков Ю.К. Обозначение конструкторской документации: Ученое пособие. – Челябинск: ЧГТУ, 1986. – 61 с.
7. Сохрин П.П., Кулешов В.В. Проектирование валов: Учебное пособие. Челябинск: Изд. ЮУрГУ, 2000. – 94 с.
8. Сохрин П.П. Проектирование ременных передач: Ученое пособие: Челябинск: ЧГТУ, 1997. – 94 с.
|
из
5.00
|
Обсуждение в статье: Определение передаточного отношения привода расчет силовых и кинематических параметров привода выбор редуктора |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы