 |
Главная |


Последовательность работы механизма
|
из
5.00
|
Теория автоматизированного электропривода
Методические указания к курсовому проектированию для студентов специальности 33 08 – Электропривод и автоматизация технологических комплексов
Алматы 2002
СОСТАВИТЕЛЬ: М.А.Мустафин. Теория автоматизированного электропривода. Методические указания к курсовому проектированию (для студентов специальности 3308-Электропривод и автоматизация технологических комплексов) – Алматы: АИЭС, 2002.- 35 с.
Методические указания соответствуют курсу Теория автоматизированного электропривода и содержат задания на выполнение курсового проекта, методы выбора двигателей для различных механизмов, расчета характеристик и параметров приводов постоянного и переменного тока.
Методические указания и задания предназначены для студентов всех форм обучения специальности 3308-Электропривод и автоматизация технологических комплексов.
Илл. 13, табл.11, библ.- 9 назв.
РЕЦЕНЗЕНТ: канд.техн.наук, доц.Р.М. Шидерова.
Печатается по плану издания Алматинского института энергетики и связи на 1999г.
©Алматинский институт энергетики и связи, 2002г.
Задания на курсовой проект
1.1 Электропривод механизма передвижения тележки мостового крана
Последовательность работы механизма
Тележка мостового крана содержит возвратно-поступательное движение во всю длину моста (от одного до другого крайнего положения).
Исходное состояние – тележка – в крайнем положении, груз поднят, включается механизм передвижения тележки. Тележка движется до противоположного конца моста и затормаживается. Мост крана перемещается на требуемое состояние, груз опускается и отцепляется. После подъема крана мост возвращается в исходное положение. Включается электродвигатель тележки, она перемещается к противоположному концу моста и затормаживается. Опускается пустой крюк, зацепляется груз и поднимается, затем цикл повторяется.
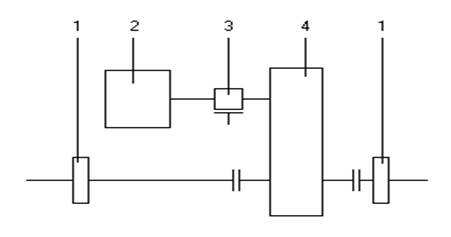 |
1 – ходовые колеса; 2 – электродвигатель;
3 – тормозной шкив; 4 – редуктор
Рисунок 1.1 - Кинематическая схема механизма передвижения
1.2 Электропривод рольганга перед ножницами
Последовательность работы механизма
Заготовка подается шлеппером на рольганг. Рольганг пускается, перемещает заготовку на длину отрезаемой штуки и тормозится. Рез заготовки ножницами осуществляется при неподвижном рольганге. Отрезная часть заготовки отводящим шлеппером снимается с рольганга и передается на дальнейшую обработку. Затем рольганг вновь пускается. После перемещения последней штуки и снятия ее с рольганга отводящим шлеппером рольганг остается неподвижным до подачи следующей заготовки.

1 – ролик; 2 – конические колеса; 3 – продольный вал;
4 – электродвигатель; 5 – тормозной шкив; 6 – редуктор
Рисунок 1.2 - Кинематическая схема рольганга
1.3 Электропривод грузового лифта
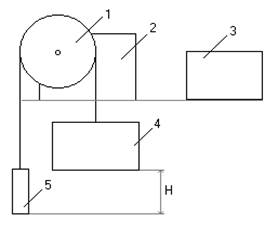 |
1 – канатоведущий шкив; 2 – редуктор; 3 – Электродвигатель;
4 – кабина; 5 – противовес
Рисунок 1.3 - Кинематическая схема лифта
Примечание: массой несущих кабелей и канатов можно пренебречь.
|
из
5.00
|
Обсуждение в статье: Последовательность работы механизма |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы