 |
Главная |


Анализ и выбор компоновки ГАП (РТК)
|
из
5.00
|
Содержание
Введение
1. Постановка задачи
2. Анализ и выбор компоновки ГАП (РТК)
3. Выбор комплектующих ГАП (РТК)
4. Информационные системы
5. Выбор системы управления
5.1. Основные технические характеристики
6. Функциональная схема системы управления
6.1. СУ технологического оборудования
6.2. СУ вспомогательного оборудования
7. Контроль работы исполнительных устройств
8. Заключение
Список используемых источников
Приложение
Введение
Сегодня можно с уверенностью утверждать, что направление технического перевооружения производства на основе гибкой автоматизации всех его процессов получило всеобщее признание в машиностроении. Комплексно-автоматизированное машиностроительное производство создает условия для одновременного достижения высокой производительности, сопоставимой с возможностями автоматических поточных линий, и технологической гибкости, обеспечиваемой ранее лишь непосредственным участием человека в производственном процессе.
Гибкие производственные системы (ГПС) получили пока наибольшее распространение в области обработки металлов резанием, что связано с большей подготовленностью этой области производства к внедрению гибкой технологии и автоматизации самих технологических процессов. Однако в последнее время разворачиваются работы в этом направлении в заготовительном и сборочном производствах. Создаются ГПС, включающие не только металлорежущее оборудование, но и литейное, кузнечно-прессовое, лазерное, сборочное и некоторые другие типы. Актуальной является проблема создания интегрированных производственных систем. Для этого необходимо решение ряда важных научных и инженерных задач создания технических и программных средств управления, измерения, контроля за ходом производственного процесса, диагностики, манипулирования обрабатываемыми деталями, конструирования инструмента, выбора технологической стратегии и др. Таким образом, проблема ГАП является многоплановой.
Применение ГПС обеспечивает распространение преимуществ массового производства, на серийное, что включает в себя повышение производительности, сокращение численности работающих и расхода фонда заработной платы, повышение качества изделий, возможности организации безлюдного производства в третью смену, сокращение времени пролёживания деталей, более быструю окупаемость капитальных вложений, сокращение времени сборочных операций и т.д.
Основными проблемами при создании и внедрении ГПС являются: контроль износа инструмента, что вызывает внеплановые потери времени на замену инструмента и необходимость проведения тщательного контроля обработанных деталей; удаление стружки из зоны обработки, особенно организация отдельного сбора стружки по видам обрабатываемых материалов; автоматический активный контроль размеров деталей в процессе обработки и т.д.
При обработке деталей типа тел вращения основным оборудованием в ГПС являются токарные станки с ЧПУ. Оснащение этих станков системой автоматического разделения пропуска, циклом резьбонарезания, подпрограммами обработки фасок и выточек, а также многоместными инструментальными магазинами, имеющими автономный привод, и устройство торможения шпинделя, превращает их в токарные многоцелевые станки. Оснащение ЧПУ запоминающими устройствами большой емкости позволяет быстро переналаживать станок на другие программы, что снижает подготовительно-заключительное время.
Обеспечение полностью автоматического и автономного цикла работы токарных станков достигается установкой накопителя заготовок, организацией их автоматической загрузки и разгрузки, а также контроля за состоянием инструментов и размерного контроля.
С целью наиболее эффективного использования станочного оборудования в ГПС необходимо, чтобы его производительность и технологические возможности охватывали различные типы производства изделий от мелкосерийного до крупносерийного, отличающегося ограниченной номенклатурой, большими партиями и сравнительно редкими переналадками по отношению к мелкосерийному производству. Поэтому тенденция к преимущественному использованию в ГПС одношпиндельных многоцелевых станков обоснована при малой серийности обрабатываемых деталей и частой переналадке. При увеличении серийности наиболее эффективно применять в ГПС многошпиндельные станочные модули с программным управлением.
Таким образом, применение ГПС и РТК обеспечивает: увеличение уровня технической вооруженности производства за счет автоматизации практически всех основных и вспомогательных операций; повышение производительности труда, в том числе за счет сокращения численности работающих; решение проблемы сокращения дефицита рабочих, выполняющих как основные, так и вспомогательные операции; изменение условий и характера труда за счет увеличения доли умственного и сведения к минимуму физического труда; сокращение в 2... 3 раза численности обслуживающего персонала, работающего во вторую и третью смены; облегчение организации и обслуживания производства; повышение требований к квалификации обслуживания, диагностики и ремонта; создание условий для ритмичной работы предприятия и другие преимущества.
Постановка задачи
Постановка задачи будет исходить из результатов курсового проекта по дисциплине «Технологические процессы и оборудование в приборостроении и радиоэлектронной промышленности» и являться его логическим продолжением. В данном курсовом проекте требовалось разработать автоматизированный технологический процесс механообработки детали типа ТВ. Изображение детали представителя показано на рисунке 1.1.

Рисунок 1.1. Кулачок эксцентриковый
В результате данного курсового проекта мы пришли к выводу что целесообразно получение заготовок путём горячей штамповки. В качестве основного технологического оборудования было принято решение использовать обрабатывающие центры ИРТ180ПМФ4. В качестве вспомогательного оборудования были выбраны: автоматический склад СТАС-250 и транспортные тележки НЦТМ-25.
Автоматический склад стеллажного типа СТАС-250, изображённый на рисунке 1.2 обслуживается автоматическими кранами-штабелёрами. Для перегрузки тары с грузом с крана-штабелёра на накопитель (например, конвейерного типа) транспортной системы ГПС или в обратном направлении используются специальные приёмные секции стеллажа.
В состав данного автоматизированного технологического (складского) модуля входят: два каркасных стеллажа 1 с полками 2 для размещения тары с грузом; автоматический кран-штабелёр 3, перемещающийся по рельсу 4; приёмное устройство, выполненное в виде загрузочно-разгрузочного поворотного стола 5 с механизмом подъёма; устройство управления с пультом оператора 6; шкаф электрооборудования 7, который кабелем 8, подвешенным на кронштейнах 9, соединён с краном-штабелёром.
Кран-штабелёр состоит из колонны с грузоподъёмной платформой, на которой смонтирован выдвижной телескопический стол 10 для установки на нём тары 11 с грузом. По команде от системы управления на загрузку склада кран-штабелёр подаёт на приёмное устройство пустую тару или столы-спутники, которые загружаются заготовками, а затем транспортируются краном штабелёром в определённую ячейку стеллажа. При поступлении команды на разгрузку склада кран-штабелёр забирает заготовки вместе с приспособлением-спутником или тарой из ячейки стеллажа, адрес которой задаётся системой управления, транспортирует и устанавливает их на стол загрузки-разгрузки. После окончания обработки по команде управления готовые детали с приспособлением-спутником (или в таре) снимаются штабелёром в заданную ячейку стеллажа.

Рисунок 1.2 – СТАС-250
На рисунке 1.3 показана безрельсовая транспортная тележка-транспортный робот (ТР) «Электроника НЦТМ-25». Особенностью данного ТР является оснащение его автономным источником питания, микропроцессорным устройством управления, обеспечивающим слежение за трассой в виде светоотражающей полосы, и загрузочно-разгрузочным столом, на котором устанавливаются тара и сменные столы-спутники с заготовками, деталями, инструментами или технологической оснасткой. ТР предназначен для автоматического перемещения названных изделий между складом-стеллажом, участками комплектования и ГПМ или РТК в составе ГПС для механообработки.
Рабочее место (станция) ТР содержит две стойки, симметрично расположенные по обе стороны трассы. На стойке автоматически устанавливается и с них снимается тара или стол-спутник при помощи подъёмного загрузочно-разгрузочного стола, смонтированного на тележке. Станция ТР оснащена датчиками типа конечных выключателей.
Тележка выполнена в виде шасси 1 с двумя ведущими колёсами 2, установленными на поперечной оси в центре шасси, и четырьмя опорными колёсами 3 на продольных осях спереди и сзади. Приводы 4 тележки смонтированы с двух сторон на шасси в его центральный части и связаны с каждым из ведущих колёс. Здесь же размещён привод 5 стола с подъёмными механизмами 6. С одной стороны тележки установлены аккумуляторные батареи 7, а с противоположной стороны-блок управления 8 со встроенной микро ЭВМ 9. Фотоэлектрические датчики 20 для слежения за трассой по светоотражающей полосе, нанесённой на полу, размещены с двух сторон в нижней части шасси. С каждой стороны тележки имеются упоры 11 с устройствами аварийного останова и фары 12. Контактное устройство 13 предназначено для автоматического подключения ТР к зарядному устройству. Для контроля перемещения тележки используются специальные устройства – измерители пути 14. Механизмы тележки сбоку и сверху закрыты кожухами 15 (на рисунке не показаны).
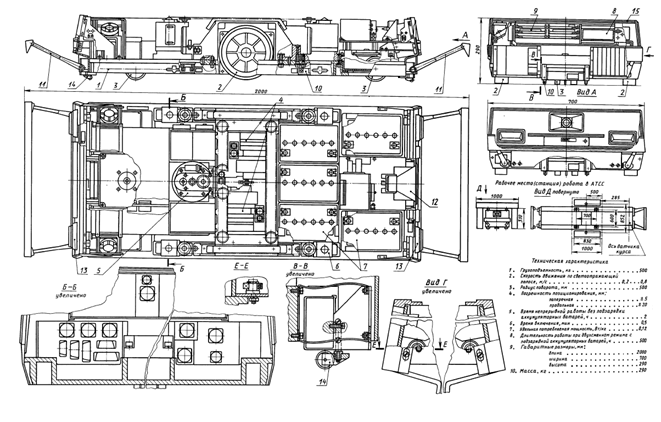
Рисунок 1.3- Электроника НЦТМ-25
Анализ и выбор компоновки ГАП (РТК)
Роботизированные комплексы для механообработки заготовок типа
тел вращения могут иметь различные компоновочные схемы в зависи-
мости от выполняемых ими технологических задач.
Наибольшее применение в машиностроении получили РТК, состоя-
щие из автоматизированных станков (токарных, круглошлифовальных,
многоцелевых и др.), оснащенных накопительными устройствами для
заготовок и деталей, системой программного управления и обслужива-
емых с помощью ПP. В первую очередь такие РТК предназначаются
для серийного изготовления деталей мелких и средних размеров с не-
большим временем обработки. Комплексы могут оснащаться как встро-
енным в станок, так и внешними ПР напольного или портального типа.
РТК мод. М01И611 — «Ритм» показанный на рисунке 2.1 предназначен для токарной (патронной
и центровой) обработки мелких деталей типа тел вращения из штучных
заготовок массой до 0,1 кг. ПР мод. «Ритм-01.08», установленный на
крышке шпиндельной бабки токарно-винторезного станка с ЧПУ мод. 1И611ПМФЗ, производит его загрузку заготовками, находящимися на
позиции выдачи их вибробункером. Обработанные изделия ПР снимает
со станка и сбрасывает в тару через специальный лоток.
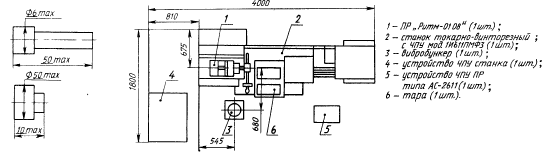
Рисунок 2.1- РТК модели М01И611
Для токарной обработки деталей типа длинных валов массой до 5 кг
из штучных заготовок используют РТК мод. 1708ПР4 (рисунок 2.2), включающий в
себя многорезцовый станок-полуавтомат типа 1708, автоматизированное
загрузочное устройство (тактовый стол) для поштучной выдачи загото-
вок и обслуживающий их ПР напольного типа мод. ПР4.
ПР в составе комплекса выполняет следующие операции: загрузку
и разгрузку станка, сбрасывание детали в тару, а также управление
включением автоматического цикла работы станка. В станке имеется
конвейер для удаления стружки, которая автоматически подается в тару.

Рисунок 2.2- РТК модели 1708ПР4
Для токарной патронной или патронно-центровой обработки деталей
средних типоразмеров (с массой заготовки до 10 кг) за один или два
установка (с возможностью поворота заготовки на 180') в настоящее
время широко используют РТК 16К2ОФЗ.Р132 (рисунок 2.3) и его модификации.
Встроенный в станок 16К2ОФЗ ПР мод. М10П62.01 выполняет в со-
ставе комплекса следующие операции: снятие заготовки с определенной
позиции тактового стола типа СТ220; установку заготовки в патрон
станка; снятие и возвращение обработанной детали на ту же позицию
тактового стола. Установка заготовок на подвижные платформы такто-
вого стола осуществляется в ориентированном виде посредством специальной оснастки. ПР может оснащаться различными типами схватов в
зависимости от вида заготовок.

Рисунок 2.3- РТК модели 16К20Ф3.Р132
РТК мод. БРСК-01 (рисунок 2.4) предназначен для автоматизации процесса то-
карной обработки в условиях мелкосерийного производства широкой
номенклатуры фланцевых деталей массой до 10 кг. Комплекс построен
на базе токарно-револьверного станка с ЧПУ мод. 1В340ФЗО или ана-
логичных токарных станков с ЧПУ (мод. 1П426ФЗ, 1,Б616ФЗ и др.),
обслуживаемых совместно с магазинным накопителем (с поворотным
столом) с помощью ПР портального типа мод. М2ОЦ.48.01.
ПР в составе комплекса выполняет загрузку станка заготовками из
магазина-накопителя, снятие обработанных деталей и укладку их в тот
же магазин.

Рисунок 2.4- РТК модели БРСК-01
На базе автоматизированного двухшпиндельного токарного станка
мод. МР-315, ПР портального типа мод. М40П.О5.01, роликового конвей-
ера-накопителя и поворотного устройства для переориентации заготовки
(поворота ее на 180') создан РТК мод. МРК-40.202 (рисунок 2.5) для двусторонней
обработки фланцевых деталей массой до 40 кг.
ПР в составе комплекса выполняет следующие операции: захват
заготовки из тары, находящейся в позиции загрузки на роликовом кон-
вейере; установку заготовки в патрон первого шпинделя; установку за-
готовки после обработки ее с одной стороны на позицию переориента-
ции; установку повернутой на 180' заготовки во второй шпиндель; пере-
несение обработанной детали к конвейеру-накопителю и установку ее
в тару.
Для совмещения операций снятия и установки заготовки и детали
в шпиндель станка ПР снабжен двухзахватным устройством. При не-
обходимости ПР может выполнять параллельную загрузку и разгрузку
двух шпинделей станка.

Рисунок 2.5- РТК модели МРК-40.202
Кроме индивидуальных РТК, в механообрабатывающем производстве
в настоящее время используют групповые роботизированные комплексы
(участки и линии), обеспечивающие полную токарную обработку дета-
лей с двух сторон, а в ряде случаев подготовку баз под последующую
обработку (например, фрезерование торцев и зацентровку валов) и
финишную (например, шлифовальную) обработку. В состав РТУ и РТК
включают несколько станков одного или различных типов, которые вза-
имно дополняют или заменяют друг друга.
В РТЛ оборудование обслуживается ПР в последовательности вы-
полнения операций для заданного технологического процесса. В отличие
от этого на РТУ предусматривается возможность изменения последо-
вательности использованияоборудования в зависимости от конкретного
варианта обрабатываемого изделия. В робототехнических комплексах
ПР кроме операций обслуживания оборудования выполняет межопера-
ционное транспортирование, переориентацию и раскладку деталей в
тару. Для обеспечения условий техники безопасности комплексы имеют
ограждение с системой светозащиты.
Последовательность обработки на взаимодополняющих или заменяю-
щих друг друга станках может быть как постоянной, так и изменяющей-
ся в зависимости от технологического задания или текущего состояния
станков.
Комплекс на базе токарного автоматизированного станка мод. 1713
(рисунок 2.6) и ПР портального типа мод. МП (двурукое исполне-
ние) предназначен для крупносерийного производства валов (массой
до 10 кг) для коробок передач сельскохозяйственных машин. Заготовки
вручную устанавливаются в ориентированном виде на тактовом столе,
который периодически их подает в зону обслуживания ПР. Последующие загрузочно-разгрузочные, транспортные операции, передача заго-
товки между станками и возврат детали на тактовый стол выполняются
ПР в технологической последовательности.

Рисунок 2.6- РТК модели 1713-МП
Для токарной обработки заготовок типа дисков, колец, втулок, флан-
цев (массой до 40 кг) применяют комплекс на базе патронного токар-
ного станка с ЧПУ агрегатного типа мод. АТ250П, обслуживаемого
универсальным ПР напольного типа мод. УМ1 показанные на рисунке 2.7.
ПР в составе комплекса осуществляет загрузку и разгрузку станков
из магазина карусельного типа и укладку деталей после обработки в
тот же магазин, который периодически поворачивается в следующую
позицию.

Рисунок 2.7- РТК модели АТ250П-УМ
РТУ мод. АСВР-041 (рисунок 2.8) предназначен для обработки различных тел
вращения — валов (массой до 40 кг) в условиях серийного производ-
ства. Комплекс построен на базе двух токарных станков с ЧПУ мод. 16К2ОФЗ, накопителей заготовок и деталей, устанавливаемых в них в
ориентированном виде, промежуточных однопозиционных столов для
обработанных на станках деталей и обслуживающего ПР портального
типа мод. СН4ОФ2.80.01.
ПР в составе комплекса выполняет загрузку станков заготовками,
их разгрузку на промежуточной позиции после обработки, межстаночное
транспортирование обработанных деталей, перебазирование и раскладку
заготовок и деталей в накопители, а также поиск в них нужных загото-
вок и деталей. РТУ снабжен системой светозащиты рабочей зоны.

Рисунок 2.8- РТК модели АСВР-041
РТЛ для обработки деталей типа буксы массой до 160 кг построена
на базе двух токарных станков с ЧПУ мод. 1П752МФЗ (рисунок 2.9), двухпозицион-
ного накопителя с поворотным столом и обслуживающего ПР порталь-
ного типа мод. УМ16ОФ2.81.02. Комплекс с помощью загрузочного
устройства непосредственно взаимодействует с автоматизированным
складом, в ячейках которого устанавливается тара с заготовками и об-
работанными деталями.
ПР в составе комплекса осуществляет следующие операции: выбор
заготовки из тары, расположенной на поворотном устройстве, и загруз-
ку первого станка для обработки одной ее стороны; последовательную
загрузку другого станка для обработки второй ее стороны; установку
готовой детали на поворотное устройство. При повороте стола этого
устройства тара перемещается в загрузочную позицию склада.

Рисунок 2.9- РТК модели 1П752МФ3
РТЛ для полной обработки вальцов сельскохозяйственных машин
(массой до 40 кг) состоит из станков: агрегатно-расточного мод. 10А803 (рисунок 2.10),
двух токарно-винторезных мод. 16К20, специализированного многорез-
цового токарного мод. МТ57 и специального агрегатного. Каждый из
станков индивидуально обслуживается ПР или манипулятором. При
помощи ПР мод. СМ40Ц.40.11 осуществляется загрузка агрегатно-рас-
точного станка мод. 10А803 заготовками из накопительного устройства
и передача их после обработки на штанговый конвейер, с которого
остальные станки последовательно загружаются манипуляторами мод.
МР80.

Рисунок 2.10- РТК модели 10А803
РТУ мод. АСВР-01 (рисунок 2.11) предназначен для обработки валов (массой до
160 кг) для электродвигателей 30 типоразмеров в условиях серийного
производства.
Заготовки в виде резаного проката подводятся электрокаром и за-
гружаются на подающий конвейер, с загрузочной позиции которого их
снимает ПР мод. УМ160Ф2.81.01 и раскладывает в ориентированном
виде в тару магазина.
Участок укомплектован фрезерно-центровальным станком мод. МР179
и двумя токарными станками с ЧПУ мод. 1Б732ФЗ или 1740ФЗ, на которых производится подрезка торцов, центрование и токарная обработка
валов. Обслуживание роботом станков осуществляется по их вызовам.
При одновременном поступлении двух заявок ПР обслуживает станок
с более длительным циклом работы.
Между станками расположены промежуточные магазины-накопите-
ли с тарой для частично. и полностью обработанных заготовок. Непосред-
ственно у каждого станка имеется промежуточный накопитель обрабо-
танных деталей. Стружка убирается конвейером, проходящим сзади
станков (на схеме планировки не показан).
ПР в составе комплекса выполняет загрузку и разгрузку станков
заготовками, межстаночное транспортирование, перебазирование заго-
товок и деталей, а также поиск заготовок в накопителе и раскладку
деталей в тару. Безопасность работы обеспечивается системой свето-
защиты с фотодатчиками, расположенными в стойках ограждения.
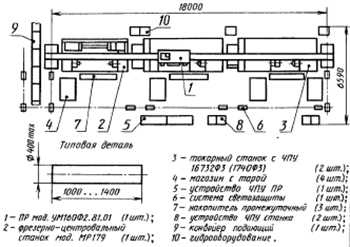
Рисунок 2.11- РТК модели АСВР-01
РТЛ мод. АСВР-07 (рисунок 2.12) предназначена для финишной обработки деталей
типа валов (массой до 160 кг) в условиях серийного производства.
В состав комплекса включены центродоводочный станок МА3926 и
два круглошлифовальных станка с ЧПУ мод. ЗМ163Ф2. Обслуживание
станков вместе с накопительным и контрольно-измерительными устрой-
ствами осуществляет ПР мод. УМ16ОФ2.81.01.
ПР в составе комплекса выполняет загрузку станков заготовками,
снятие со станка, межстаночное транспортирование, перебазирование
заготовок и деталей, а также поиск заготовок в магазине и перенос их
на позицию контроля перед загрузкой в станок. Заготовки располагают-
ся в магазине в ориентированном виде. Комплекс оснащен системой
светозащиты.

Рисунок 2.12- РТК модели АСВР-07
РТЛ для обработки валов (массой до 40 кг) в крупносерийном про-
изводстве построена на базе фрезерно-центровального станка с ЧПУ
МР71, токарного станка с ЧПУ моделей 1А730 или КМ144, шаговых
конвейеров-накопителей заготовок и обработанных деталей, обслужи-
ваемых с помощью ПР начального типа СМ40Ц.40.11 и показана на рисунке 2.13.
ПР в составе комплекса выполняет операции загрузки и разгрузки
станков в соответствии с заданной технологической схемой обработки,
осуществляет координацию автоматических циклов их работы.

Рисунок 2.13- РТК модели МР71
|
из
5.00
|
Обсуждение в статье: Анализ и выбор компоновки ГАП (РТК) |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы