 |
Главная |


Автоматизация процесса сварки плавящимся электродом
|
из
5.00
|
Цикл начинается с операции «Возбуждение дуги». Для надежного возбуждения дуги применяют способ отрыва конца электродной проволоки от свариваемого изделия в момент включения сварочного напряжения на автомате источнике питания. Перед началом сварки конец электродной проволоки подводят к детали до получения с ней электрического контакта. При включении автомата появляется сварочное напряжение между свариваемым изделием и электродной проволокой и запускается двигатель механизма подачи, который начинает отводить конец электродной проволоки от детали, возбуждая дугу. По мере отвода конца электродной проволоки напряжение на дуге возрастает, и когда оно достигает определенной величины, двигатель реверсируется и начинает подавать электродную проволоку в зону дуги. Время этой операции на циклограмме обозначено t1.
После возбуждения дуги начинается операция «Сварка», во время которой в зону дуги подается электродная проволока и перемещается сварочная каретка. Длительность операции, обозначенная на циклограмме t2, зависит от длины шва и скорости сварки. После окончания операции «Сварка» происходит растяжка дуги, осуществляется она путем прекращения подачи электродной проволоки в зону дуги без выключения сварочного напряжения. Под действием напряжения дуга продолжает гореть, и конец электродной проволоки оплавляется, растягивая дугу до тех пор, пока она не оборвется. При обрыве дуги выключается сварочное напряжение. Время операции «Растяжка дуги» обозначено на циклограмме t3
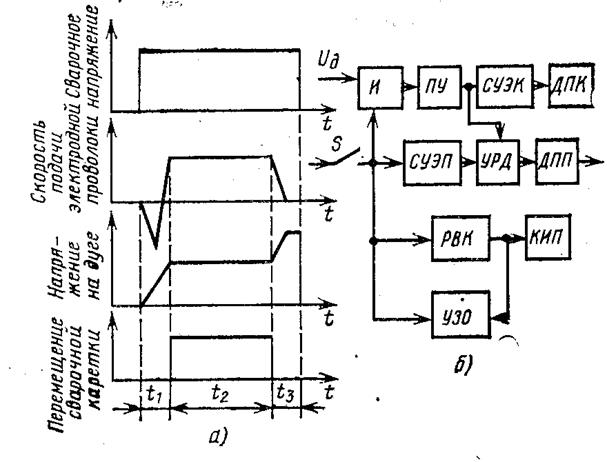
На рис. 8.3, б представлена функциональная схема системы управления циклом сварки. При замыкании выключателя S через реле включения контактора РВК включается контактор источника питания КИП, подавая сварочное напряжение на электрод. В это же время с помощью системы управления электроприводом подачи проволоки СУЭП и устройства реверса двигателя УРД запускается двигатель подачи проволоки ДПП. Конец электродной проволоки отводится от детали, дуга возбуждается, и напряжение на ней (Уд начинает увеличиваться. Через схему совпадения И напряжение дуги подается на пороговое устройство ПУ, которое срабатывает при достижении напряжением заранее установленного значения. Сработав, пороговое устройство запускает через систему управления электроприводом каретки СУЭК двигатель перемещения каретки ДПК и с помощью устройства реверса УРД реверсирует ДПП. С этого момента начинается подача электродной проволоки в зону дуги и происходит сварка.
По окончании сварки элемент S выключают, и двигатель ДПП останавливается, прекращая подачу проволоки. Останавливается также и двигатель ДПК, так как пороговое устройство вернулось в исходное состояние из-за снятия сигнала со входа схемы И выключателем S. Контактор КИП продолжает оставаться включенным, потому что РВК снабжено устройством задержки на отпускание УЗО. Происходит растяжка дуги. По истечении времени t3, определяемого УЗО, реле РВК обесточивается, и контактор КИП отключает сварочное напряжение. На этом цикл работы заканчивается.
35.
36.
СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Теории автоматического регулирования и управления
39.
Основные понятия, классы задач и виды управления
41.
42.Среди технических объектов, создаваемых для удовлетворения различных производственных процессов, хозяйственных, оборонных и других нужд общества, значительная доля таких, которые не могут обеспечить желаемое течение процесса или функционирование объектов (достижение желаемой цели) без специально организованной коррекции процессов в них и соответственно воздействий извне на них. Во многих случаях такие корректирующие воздействия извне необходимы только для некоторой части технического объекта или объекта в целом.
43.Объекты, в которых протекает управляемый процесс, называются объектами управления (ОУ). Это разнообразные технические устройства и комплексы, технологические или производственные процессы. Состояние объекта можно характеризовать одной или несколькими физическими величинами, называемыми корректирующими воздействия, или управляемыми, регулируемыми переменными, а процессы выработки и осуществления управляющих воздействий – управлениями. При выборе вида и принципа управления должны учитывать два основных требования, вытекающих из назначения управления: во-первых, цель и вид управления должны быть согласованы с видом желаемого функционирования объекта (с целью функционирования), во-вторых, принципы управления и значения параметров управляющих воздействий должны быть согласованы со свойствами ОУ. Для технического устройства, например, сварочного источника питания, регулируемой переменной величиной может быть напряжение на его выходных клеммах в зависимости от тока процесса сварки; для производственного участка или цеха – объем выпускаемой им промышленной продукции.
44.Как правило, к объекту управления приложено два вида воздействий: корректирующее, управляющее воздействие извне z(t) и возмущающее f(t); состояние объекта характеризуется переменной х(t) (рис.1.1).
45.
46.
47. 
48.Рис. 1.1. Сигналы в объекте управления
49.
50.Изменение регулируемой величины х(t) обусловливается как управляющим воздействием z(t), так и возмущающим, или помехой, f(t).
51.Воздействия, прикладываемые к объекту управления с целью изменения управляемой величины в соответствии с требуемым законом, а также для компенсации влияния возмущений на характер изменения управляемой величины, называются управляющими.
52.Возмущающим называется такое воздействие, которое нарушает требуемую функциональную связь между регулируемыми или управляемыми переменными и управляющим воздействием. Если возмущение характеризует действие внешней среды на объект, то оно называется внешним. Если это воздействие возникает внутри объекта за счет протекания нежелательных, но неизбежных процессов при его нормальном функционировании, то такие возмущения называются внутренними.
53.Основная цель автоматического управления любым объектом или процессом состоит в том, чтобы непрерывно поддерживать с заданной точностью требуемую функциональную зависимость между управляемыми переменными, характеризующими состояние объекта, и управляющими воздействиями в условиях взаимодействия объекта с внешней средой, т.е. при наличии как внутренних, так и внешних возмущающих воздействий. Математическое выражение этой функциональной зависимости называется алгоритмом управления.
54.Любой объект управления сопряжен с одним или несколькими регуляторами, формирующими управляющие воздействия, подаваемые на регулирующий орган. Объект управления совместно с управляющим устройством, или регулятором, образуют систему управления, или регулирования. При этом, если человек не участвует в процессе управления, то такая система называется системой автоматического управления.
55.Система – это совокупность взаимосвязанных и взаимодействующих элементов, предназначенная для достижения определенных целей (решения определенных задач), обладающая свойствами целостности и законченности.
56.Регулятор системы представляет собой комплекс устройств, соединенных между собой в определенной последовательности и осуществляющих реализацию простейших операций над сигналами. В связи с этим представляется возможным проведение декомпозиции (расчленения) регулятора на отдельные функциональные элементы – конструктивно-целостные ячейки, выполняющие одну определенную операцию с сигналом. К таким операциям следует отнести:
57.1) преобразование контролируемой величины в сигнал;
58.2) преобразование:
59.а) сигнала одного рода энергии в сигнал другого рода энергии,
60.б) непрерывного сигнала в дискретный сигнал - и обратно,
61.в) сигнала по величине энергии,
62.г) вида функциональной связи между входными и выходными сигналами;
63.3) хранение сигналов;
64.4) формирование программных сигналов;
65.5) сравнение контролируемых и программных (требуемых) сигналов и формирование сигнала рассогласования (ошибки);
66.6) выполнение логических и арифметических операций;
67.7) преобразование частотных свойств сигнала (сжатие, модуляция);
68.8) распределение сигналов по различным каналам управления;
69.9) применение сигналов для воздействия на объект управления посредством регулирующих органов.
70.Перечисленные операции с сигналами выполняются элементами системы автоматического управления (САУ). Эти сигналы используются в дальнейшем как основа управления всего многообразия автоматики, применяемой в различных системах по характеру, назначению и принципу действия в САУ и контроля.
71.Структура системы – совокупность и характер связей и отношений элементов в системе. Нарушения структуры объекта, как правило, приводят к изменениям его свойств и соответственно хода процессов в нем, а, следовательно, и возможностей достижения желаемого функционирования. Возмущения на структуру физически проявляются в виде изменений уровня (вплоть до полной потери) работоспособности отдельных элементов (изменений свойства законченности) или нарушений связей между элементами (нарушений свойства целостности). В теории надежности возмущения этого класса называют отказами.
72.С точки зрения выбора методов анализа эволюции работоспособности объектов, а также обеспечения необходимого уровня их работоспособности важно различать вид возмущений на структуру: внутренние и внешние.
73.В практической деятельности человечество встречается со значительным разнообразием физических принципов функционирования и назначений технических объектов, однако число классов задач управления ими невелико и может быть сведено к четырем классам [8]:
74.1. Задачи обеспечения заданного характера изменения координат или некоторых функций от них объекта управления. Задачи этого класса наиболее часто встречаются в практике автоматизации технологических процессов, например, САУ скоростью сварки, скоростью подачи электродной проволоки, током и напряжением на дуге и т.п.
75.2. Задачи коррекции динамических свойств объектов управления, например задачи перевода из естественного неустойчивого характера процессов в объекте в устойчивый процесс; из колебательного – в апериодический и т.п. Такого рода задачи чаще всего встречаются в процессе управления переносом металла с электрода в сварочную ванну при автоматической сварке плавящимся электродом, в процессе управления проплавляющей способности дуги при импульсно-дуговой сварке неплавящимся электродом тонколистовых конструкций, управления подвижными объектами, в частности летательными аппаратами.
76.3. Задачи компенсации возмущений, воздействующих на процессы в объектах (действия факторов внешней среды или изменений параметров собственных свойств объектов) с целью сохранения желаемого характера их функционирования. Этот класс задач управления включает три типичных, широко распространенных в практике автоматизации объектов подкласса.
77.3.1. Задачи компенсации возмущений, вызывающих отклонения от желаемых значений координат процессов в объектах. Их называют возмущениями на координаты объектов. Редко встречаются объекты, не подверженные возмущениям на координаты. В качестве примеров можно отметить возмущения по длине дуги при сварке, которые существенно влияют на энергетические параметры процесса сварки и геометрические параметры шва. Изменения электрической нагрузки сварочных источников тока вызывают отклонение выходного напряжения от номинальных величин и т. п. Заметим, что в дифференциальных уравнениях, описывающих процессы в объектах, возмущения этого класса представляются в виде дополнительных членов в правых частях уравнений.
78.3.2. Задачи компенсации возмущений, приводящих к нежелательным изменениям параметров динамических свойств объектов. Действие возмущений этого вида в дальнейшем будем называть параметрическими, которые приводят к изменениям не только значений координат процессов в объекте, но и качественного характера самих процессов. Например, объекты с устойчивым характером процессов могут переходить в разряд объектов с неустойчивыми процессами. Параметрические возмущения проявляются, например, в форме изменения теплофизических параметров (коэффициентов теплопередачи, теплоотдачи) в объектах теплоэнергетики и химии, в форме изменения эффективности рулей в летательных аппаратах, в форме старения и износа в электронных и электромеханических установках и т. д.
79.В дифференциальных уравнениях динамики объектов этот вид возмущений проявляется в виде переменных, зависящих от времени или координат других параметров процессов, коэффициентов.
80.3.3. Задачи компенсации возмущений, приводящих к нежелательным изменениям структуры объектов. Такие возмущения называют возмущениями на структуру или структурными возмущениями. Для полного их раскрытия обратимся к некоторым исходным понятиям. Прежде всего, отметим, что большинство объектов представляют собой систему элементов.
81.Внутренние возмущения являются следствием скрытых дефектов элементов объекта или связей между ними, проявляются случайным образом в процессе эксплуатации при соблюдении установленных для объекта технических условий эксплуатации.
82.Внешние возмущения являются следствием внешних неблагоприятных воздействий на объект, выходящих за рамки установленных (нормальных) технических условий эксплуатации объекта. Работоспособность объектов и систем управления при внешних неблагоприятных воздействиях и методы ее обеспечения исследуются в теории живучести.
83.4. Задачи координации взаимодействия элементов объекта. Для многих объектов сложной структуры, т. е. многоагрегатных объектов, желаемое их функционирование достигается при соблюдении установленных точностных и временных условий. Например, последовательности включения, синхронности отдельных операций и т. п.
84.Для решения выделенных четырех основных классов задач управления достаточно организовать с помощью технических средств и (или) привлечения людей (операторов) один или несколько следующих видов управления:
85.· координатное управление, при котором управляющие воздействия представляют собой изменения входных координат физических процессов в объекте, ограничений области допустимых значений некоторых координат или показателей качества процессов в объекте;
86.· параметрическое управление, при котором управляющие воздействия – изменения значений физических параметров элементов объекта;
87.· структурное управление, при котором управляющие воздействия – изменения состава элементов и (или) связей между ними и режимов функционирования.
88.При автоматизации конкретных объектов, особенно объектов сложной структуры – технических комплексов, названные виды управлений применяют при построении управляющих систем в различных сочетаниях. Выбор областей их применения составляет одну из главных проблем формирования функциональной структуры управляющих систем.
89.Различают несколько видов систем автоматического управления применительно к разнообразным техническим задачам:
90.· частичная автоматизация управления, когда создается частично автоматизированная система управления технологическим процессом, где обслуживающий персонал, располагающий информацией (сведениями) о задаче управления, включается в процесс управления. При этом оператор воздействует только на управляющий элемент, а последний через исполнительный элемент действует на объект (рис. 1.2,а). Примером таких систем являются автоматы для сварки в среде защитных газов типа АДГ-502, АДГ-601 и под флюсом АДФ-1001, АДФ-1200, контактные машины для стыковой сварки оплавлением типа МСМУ-150 и контактной точечной сварки - МТМ-75;
91.· полная автоматизация контроля, когда системой автоматического контроля осуществляется автоматический контроль, перед которым стоит только задача сбора информации о состоянии объекта (рис. 1.2, б);
92.· полная автоматизация управления, представляющая наиболее совершенный вид автоматизации, сочетающий в себе использование информации о задачах управления и сведений о его результатах (рис. 1.2,в). В этом случае управление объектом происходит полностью автоматически, т.е. без участия оператора, например, САУ технологическим процессом контактной и дуговой сварки на основе управляющего вычислительного комплекса 15ВУМС-25-025.
93.
94. 
95.
96.Рис.1.2. Разновидность функциональных схем управления:
97.а – система управления; б – система контроля;
98.в – система автоматического управления с обратной связью
99.
100.САУ могут строиться по разомкнутому (см. рис.1.2.а, б) и замкнутому (см. рис.1.2, в) принципу. Более широкое распространение получили замкнутые системы управления, на анализе которых будет сосредоточено внимание при рассмотрении примеров систем.
101.
102.
103.
104.
105.
106.
107.
108.
109.
110.
111.
112.
113.
114.
|
из
5.00
|
Обсуждение в статье: Автоматизация процесса сварки плавящимся электродом |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы