 |
Главная |


Динамическая модель ЛА.
|
из
5.00
|
Содержание
Техническое задание. Технические требования, предъявляемые к системе стабилизации ЛА. Исходные данные.
Введение
1 Динамическая модель ЛА. 6
2 Структурный синтез системы стабилизации ЛА. 10
3 Структурные схемы системы стабилизации ЛА. Описание работы системы стабилизации ЛА. 10
4 Рулевой привод ЛА. 11
4.1 Предварительный параметрический синтез системы стабилизации ЛА с использованием МСК. 11
4.2 Выбор типа рулевого привода. 14
4.3 Определение динамических и статических показателей рулевого привода. 16
4.4 Расчёт рулевой машинки. 17
4.4.1 Структурная схема нагруженной рулевой машинки. 17
4.4.2 Определение статической составляющей угла отклонения руля ЛА  . 18
. 18
4.4.3 Определение статической составляющей угла отклонения руля ЛА  . 18
. 18
4.4.4 Определение динамических составляющих угла отклонения руля ЛА  и
и  . 19
. 19
4.4.5 Определение параметров рулевой машинки. 21
4.4.6 Оценка энергетических параметров рулевой машинки. 21
5 Параметрическая оптимизация внутреннего контура системы стабилизации ЛА с ДГ. 23
6 Параметрический синтез системы стабилизации ЛА с использованием ЛЧХ. 26
7 Моделирование системы стабилизации ЛА и оценка её качественно - точностных показателей. 27
7.1 Режим стабилизации. 27
7.2 Режим наведения. 28
7.3 Моделирование системы стабилизации с учётом нелинейностей рулевого привода. 28
8 Выводы. 29
Техническое задание.
Рассчитать систему стабилизации в продольной плоскости статически устойчивого ЛА для двух режимов полёта – максимальной (  ) и минимальной (
) и минимальной (  ) скоростей. Наведение ЛА на цель осуществляется по методу пропорциональной навигации.
) скоростей. Наведение ЛА на цель осуществляется по методу пропорциональной навигации.
Технические требования.
Система стабилизации должна удовлетворять следующим техническим требованиям:
Система стабилизации должна быть устойчивой и иметь:
¾ запасы устойчивости по амплитуде  ;
;
по фазе  ;
;
¾ быстродействие  ;
;
¾ показатель колебательности  ;
;
¾ статическую ошибку по угловой скорости тангажа  ;
;
по нормальному ускорению  .
.
Исходные данные.
Летательный аппарат:
¾ аэродинамическая схема – нормальная;
¾ режим полёта – горизонтальный на заданной высоте  ;
;
¾ скорость полёта  ;
;
¾ масса  ;
;
¾ площадь крыла  ;
;
¾ САХ крыла  ;
;
¾ мидель корпуса  ;
;
¾ момент инерции  ;
;
¾ максимальный шарнирный момент  ;
;
¾ тяга двигательной установки  ;
;
¾ допустимая перегрузка ЛА  ;
;
¾ максимальный возмущающий момент  ;
;
¾ параметры стандартной атмосферы приведены в таблице 1;
¾ изменение аэродинамических коэффициентов ЛА в зависимости от числа М приведено в таблице 2.
Система стабилизации:
¾ время полёта ЛА  ;
;
¾ коэффициенты передачи измерительных устройств:
o дифференцирующего гироскопа  ;
;
o датчика линейных ускорений  ;
;
¾ динамика рулевого привода (РП) описывается колебательным звеном:
o коэффициент передачи обратной связи РП  ;
;
o коэффициент передачи кинематической передачи  ;
;
o коэффициент передачи ЭМП  ;
;
o коэффициент запаса по шарнирному моменту  ;
;
¾ давление рабочего тела, подаваемого от источника питания на рулевую машинку:
o пневматическую  ;
;
o гидравлическую  ;
;
o на горячем газе  ;
;
¾ питание электрической рулевой машинки – от бортовой сети постоянного тока  ;
;
¾ момент трения подвижных частей РП  ;
;
¾ максимальный управляющий сигнал системы наведения  .
.
Таблица 1. Параметры стандартной атмосферы.

| 10 | 15 | 20 |

| 0,414 | 0,195 | 0,089 |

| 299,45 | 295,07 | 295,07 |
Таблица 2. Аэродинамические коэффициенты ЛА.

| 
| 
| 
| 
|
| 1,0 | 2,08 | 1,5 | 0,19 | 0,25 |
| 1,2 | 2,16 | 1,57 | 0,25 | 0,32 |
| 1,4 | 2,22 | 1, 6 | 0,3 | 0,35 |
| 1,6 | 2,22 | 1,6 | 0,36 | 0,35 |
| 1,8 | 2,15 | 1,5 | 0,41 | 0,33 |
| 2,0 | 2,05 | 1,4 | 0,4 | 0,29 |
| 2,2 | 1,9 | 1,31 | 0,35 | 0,26 |
| 2,4 | 1,7 | 1,24 | 0,32 | 0,23 |
| 2,6 | 1,56 | 1,17 | 0,29 | 0,22 |
| 2,8 | 1,47 | 1,08 | 0,27 | 0,21 |
| 3,0 | 1,4 | 1,0 | 0,25 | 0,2 |
| 3,2 | 1,33 | 0,92 | 0,23 | 0,19 |
| 3,4 | 1,28 | 0,85 | 0,215 | 0,18 |
| 3,6 | 1,24 | 0,79 | 0,20 | 0,178 |
| 3,8 | 1,21 | 0,75 | 0,195 | 0,175 |
Таблица 3. Сводная таблица исходных данных.
| Параметр | Размерность | Значение | Примечание |

| км | 10 | |
|
| м/с | 800 | режим I |
|
| м/с | 400 | режим II |

| кг | 90 | |

| м2 | 0,4 | |

| м | 0,6 | |

| кг ×м2 | 18 | |

| Н ×м | 40 | |

| Н | 3000 | |

| Н ×м | 240 | |

| « g» | 7 | |

| м/с2 | 2,5 | |

| рад/с | 0,02 | |

| с | 15 | |

| В/град ×с-1 | 0,09 | |

| В/м ×с-2 | 0,3 | |

| В/град. руля | 0,5 | |

| рад руля/м | 17,45 | |

| рад СТ/А | 20 | |

| 1,2…1,5 | Принято 1,2 | |

| В | 4,5 |
Введение.
Система автоматической стабилизации (ССТ) является одной из основных частей системы управления полётом и предназначена для стабилизации и управления угловым движением летательного аппарата (ЛА). Основное назначение ССТ заключается в улучшении устойчивости и управляемости ЛА. В беспилотных ЛА ССТ обеспечивает правильность выдачи сигналов управления при самонаведении и телеуправлении по двум каналам наведения.
ССТ представляет собой единую пространственную систему. Однако в процессе проектирования её принято разделять на три составные части: по каналам крена, тангажа и рыскания. Между этими каналами существуют аэродинамические и инерционные перекрёстные связи. Большое влияние ССТ оказывает на уменьшение перекрёстных связей между каналами и повышение точности наведения ЛА.
Качество ССТ определяется способностью парирования внешних возмущений и степенью влияния переменности параметров ЛА на динамические процессы отработки углов крена, тангажа и рыскания.
ССТ строятся по принципу следящих систем на основе отрицательных обратных связей (ОС). Замкнутая система должна быть устойчивой и хорошо демпфированной. Для корректной работы системы следует выбирать частоту среза ССТ в несколько раз (обычно более чем в 3 раза) выше частоты системы наведения. Однако следует иметь в виду, что слишком широкая полоса пропускания приводит к увеличению уровня шумов на выходе, и, как следствие, возрастают динамические ошибки.
Поскольку ССТ работает в двух режимах: режим стабилизации и режим отработки сигнала управления, то расчёт следует вести для каждого режима в отдельности. Кроме того, поскольку ЛА описывается в общем случае нелинейными нестационарными уравнениями, то после линеаризации уравнений возникает необходимость проведения независимых расчётов для нескольких характерных режимов полёта ЛА.
Динамическая модель ЛА.
Уравнения движения ЛА являются нелинейными нестационарными уравнениями высокого порядка. Их анализ весьма затруднителен, поэтому примем ряд допустимых упрощений, позволяющих проводить анализ динамики ЛА и синтез ССТ.
Поскольку рассматриваемый ЛА представляет собой ракету типа «Воздух-воздух», обладающую относительно малым удлинением, то его можно рассматривать как абсолютно жёсткое тело (упругими колебаниями ЛА пренебрегаем). В этом случае движение ЛА описывается уравнениями движения центра масс ЛА; уравнениями движения вокруг центра масс; кинематическими уравнениями вращательного движения и движения центра масс ЛА, а также уравнениями связи [1].
Далее проводят линеаризацию указанных уравнений, при этом, считая параметры опорного режима известными (их в частности можно получить, решая численными методами исходную систему нелинейных уравнений). В ходе линеаризации учитывают только первые производные ряда Тейлора. При этом, с целью упрощения получаемых линеаризованных уравнений, обычно принимают следующие допущения:
Предполагают углы атаки и рыскания опорного режима малыми, что позволяет избавиться от тригонометрических функций углов.
Предполагают, что составляющие угловой скорости вращения ЛА в невозмущённом полёте малы. Это позволяет не рассматривать слагаемые содержащие эти переменные.
Предполагают, что в невозмущённом движении боковые кинематические параметры и углы отклонения органов управления боковым движением являются достаточно малыми величинами.
В результате система линеаризованных уравнений движения ЛА распадётся на две независимые подсистемы: первая определяет продольное возмущённое движение ЛА, а вторая боковое возмущённое движение.
Поскольку перед нами поставлена задача разработки ССТ для продольного канала, далее будем рассматривать только уравнения продольного возмущённого движения ЛА. Этот тип движения разлагается на быстрое (быстро затухающее) и медленное (медленно затухающее) составляющие движения. Медленное движение является либо колебательным с большим периодом, либо апериодическим с большой постоянной времени. У ЛА с автоматической системой управления этап медленного движения обычно не успевает развиться. Объясняется это тем, что ССТ реагирует на изменение кинематических параметров в медленном движении соответствующими отклонениями органов управления, после чего возникает новое возмущённое движение. Таким образом, допустимым является рассмотрение только первого этапа возмущённого движения – быстрого движения.
Дальнейшее упрощение уравнений продольного движения связано с отбрасыванием слагаемого учитывающего влияние силы тяжести на возмущённое движение аппарата. Для манёвренных ЛА с малой нормальной силой, создаваемой органами управления, коэффициентами, содержащими нормальную силу, пренебрегают.
После проведения всех вышеуказанных упрощений получим следующую систему уравнений продольного движения:
 (1)
(1)
Здесь
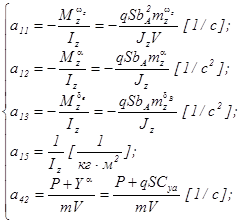 (2)
(2)
Параметры  определяются по таблице 2 в зависимости от режима полёта; скоростной напор рассчитывается по следующей формуле:
определяются по таблице 2 в зависимости от режима полёта; скоростной напор рассчитывается по следующей формуле:
 .
.
К системе (1) применим преобразование Лапласа и получим передаточную функцию (ПФ) ЛА от  до
до  :
:
 , где (3)
, где (3)
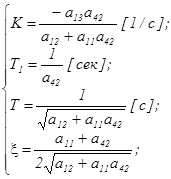 (4)
(4)
По приведённым формулам произведём расчёт параметров ЛА для двух режимов. Результаты занесём в таблицу 4.
Таблица 4. Сводная таблица результатов.
|
Параметр
|
Размерность | Значение Режим полета | |
| I (Vmax) | II (Vmin) | ||

| 2,67 | 1,35 | |

| Н / м2 | 132480 | 33120 |

| рад-1 | 1,52 | 2,19 |

| 1,15 | 1,58 | |

| рад-1 | 0,29 | 0,27 |

| рад-1 | 0,22 | 0,34 |

| с-1 | 1,52 | 1,05 |

| с-2 | 512 | 119 |

| с-2 | 388 | 150 |

| кг -1 ×м -2 | 0,06 | 0,06 |

| с-1 | 1,16 | 0,89 |

| с-1 | 0,88 | 1,11 |

| дБ | 1,15 | 0,93 |

| с | 0,86 | 1,12 |

| с-1 | 1,16 | 0,89 |

| 0,06 | 0,05 | |

| с | 0,044 | 0,09 |

| с-1 | 22,7 | 10,9 |

| 1,35 | 1,03 | |

| м / с-2 | 704 | 444 |

| дБ | 56,95 | 52,9 |

| 0,06 | 0,08 | |
Для 1 режима:
 ;
;
для 2 режима:
 .
.
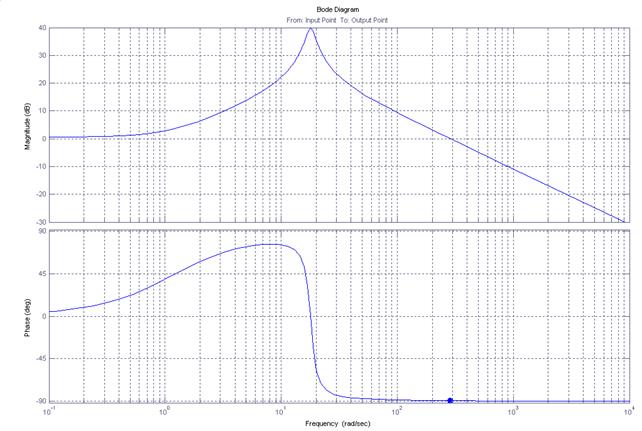
На рис. 1, 2 приведены частотные характеристики вышеприведённых ПФ ЛА для двух режимов.

|
|
|
из
5.00
|
Обсуждение в статье: Динамическая модель ЛА. |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы