 |
Главная |


Параметрический синтез системы стабилизации ЛА с использованием ЛЧХ.
|
из
5.00
|
В предыдущем параграфе была произведена оптимизация контура демпфирования. При этом из рассмотрения был исключен контур по перегрузке. В настоящем параграфе производится выбор параметров ДЛУ (точнее КУ1) исходя из требований к запасам устойчивости ССТ.
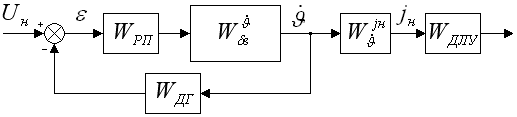
Рассмотрим разомкнутую ССТ, но с замкнутым контуром демпфирования (см. Рис. 19).
|
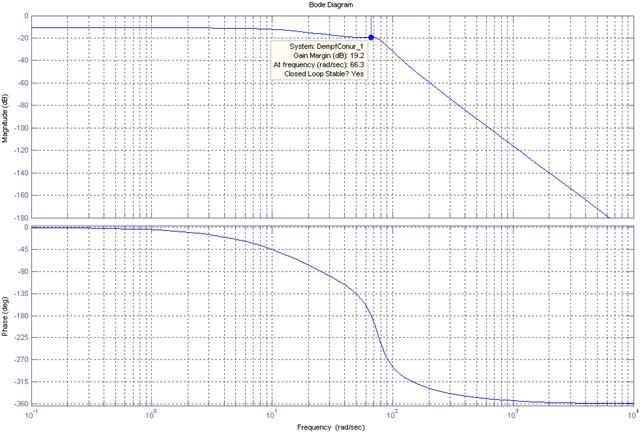
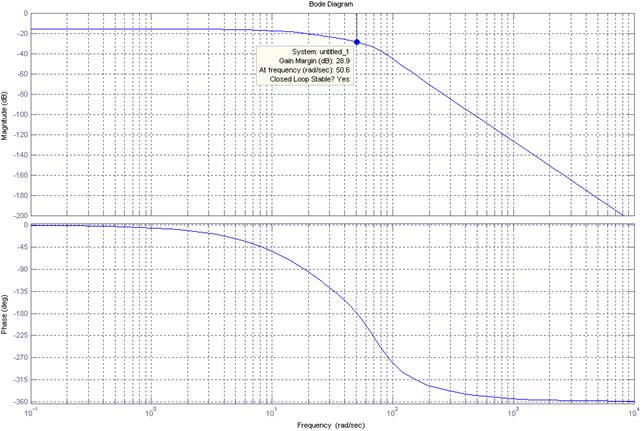
В качестве первоначальных параметров системы выберем значения, полученные при помощи МСК. Определим запасы устойчивости ССТ для двух режимов полёта. Для этого при помощи пакета Matlab 6.5 построим ЛАХ системы Рис. 18. Запасы устойчивости составляют:
Для I режима: по амплитуде –  ; по фазе – не определены.
; по фазе – не определены.
Для II режима: по амплитуде –  ; по фазе –не определены.
; по фазе –не определены.
Полученные значения удовлетворяют требованиям технического задания, следовательно, оставим их в качестве рабочих параметров.
|
|
Моделирование системы стабилизации ЛА и оценка её качественно - точностных показателей.
При моделировании будем рассматривать 4 режима: режим стабилизации и наведения при минимальном и максимальном значении скоростного напора (скорости ЛА). В результате моделирования будут получены переходные процессы ССТ для  и
и  , и определены установившиеся ошибки отработки системой сигнала управления и возмущения.
, и определены установившиеся ошибки отработки системой сигнала управления и возмущения.
Режим стабилизации.
|
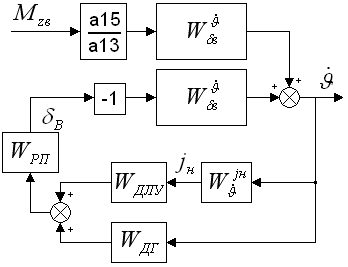
Моделирование будем проводить по схеме рис. 27, для значений параметров, полученных в предыдущем параграфе. В качестве входного воздействия подадим ступеньку  .
.
Результаты моделирования приведены в приложении 4. Определим по переходным процессам установившиеся ошибки и основные показатели качества. Получившиеся значения занесём в таблицу 5.
Режим наведения.
Моделирование будем проводить по схеме рис.4. При этом на вход подаётся ступенька с максимальным значением сигнала управления (  ).
).
Полученные при моделировании переходные процессы приведены в приложении 4, качественно-точностные параметры по всем режимам сведены в таблице 5.
Таблица 5. Показатели качества ССТ для различных режимов полёта.
| Режим | 
| 
| 
| 
| |
| Наведение | 1 режим (Vmax) | 0,24 | 0,0002 | 0,23 | @0 |
| 2 режим (Vmin) | 0,61 | 0,0012 | 0,45 | 0 | |
| Стабилизация | 1 режим (Vmax) | 17,7 | 0,0197 | 0,23 | @0 |
| 2 режим (Vmin) | 33,5 | 0,067 | 0,45 | 0 | |
Как видно по полученным результатам ССТ удовлетворяет требованиям ТЗ лишь частично, т.к. в режиме стабилизации присутствует неприемлемая установившаяся ошибка по  и
и  . Присутствие данной ошибки объясняется тем, что ССТ статическая. Для устранения установившихся ошибок следует изменить исходную структуру ССТ, введя в прямую цепь интегратор (например, использовать астатический РП), и повторить расчёт.
. Присутствие данной ошибки объясняется тем, что ССТ статическая. Для устранения установившихся ошибок следует изменить исходную структуру ССТ, введя в прямую цепь интегратор (например, использовать астатический РП), и повторить расчёт.
|
из
5.00
|
Обсуждение в статье: Параметрический синтез системы стабилизации ЛА с использованием ЛЧХ. |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы