 |
Главная |


Структурная схема нагруженной рулевой машинки.
|
из
5.00
|
В предыдущем параграфе обосновано выбран пневматический привод. Будем использовать однокаскадный привод с распределителем типа «струйная трубка». Указанный тип привода обладает не высоким КПД, но очень прост и надёжен, что имеет большое значение для беспилотных ЛА одноразового использования (ракет класса воздух-воздух).
Для проведения расчётов используем упрощенную линеаризованную модель нагруженной пневматической рулевой машинки (РМ). Структурная схема РМ представлена на Рис. 9.
|
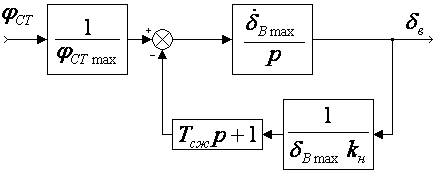
Здесь
 – угол разворота струйной трубки относительно нейтрального положения;
– угол разворота струйной трубки относительно нейтрального положения;
 – максимальное значение угла разворота струйной трубки;
– максимальное значение угла разворота струйной трубки;
 – максимальное значение угла поворота руля;
– максимальное значение угла поворота руля;
 – максимальное значение скорости поворота руля;
– максимальное значение скорости поворота руля;
 – Коэффициент запаса по нагрузке;
– Коэффициент запаса по нагрузке;
 – постоянная времени, обуславливающая динамику РМ из- за сжимаемости рабочего тела.
– постоянная времени, обуславливающая динамику РМ из- за сжимаемости рабочего тела.
Согласно приведённой схеме запишем ПФ РМ:

 , где (19)
, где (19)
 ;
;  . (19’)
. (19’)
Для определения параметров ПФ РМ необходимо определить значения угла и скорости отклонения руля.
4.4.2 Определение статической составляющей угла отклонения руля ЛА  .
.
При помощи структурной схемы Рис. 4 составим ПФ  :
:
 , (20)
, (20)
здесь символом «~» обозначены небезынерционные части ПФ, т.е. ПФ без учёта коэффициента передачи.
Выражение (20) позволяет легко определить установившееся значение положения руля под действием сигнала управления  :
:

 .
.
4.4.3 Определение статической составляющей угла отклонения руля ЛА  .
.
Найдём эквивалентное отклонение руля, соответствующее действию заданного возмущающего момента:
 .
.
При помощи структурной схемы Рис. 5 составим ПФ  :
:
 , (21)
, (21)
Таким образом, учитывая (21), получим:


 .
.
4.4.4 Определение динамических составляющих угла отклонения руля ЛА  и
и  .
.
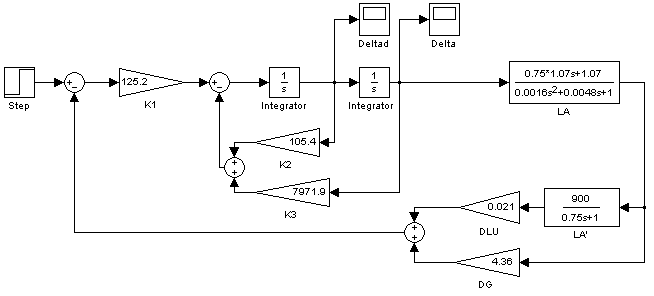
Для определения динамических составляющих угла отклонения руля произведём моделирование при помощи пакета Matlab 6.5. Структурная схема для моделирования составлена на основе Рис. 4, и приведена на Рис.10. В ней ПФ привода представлена через интеграторы.
|
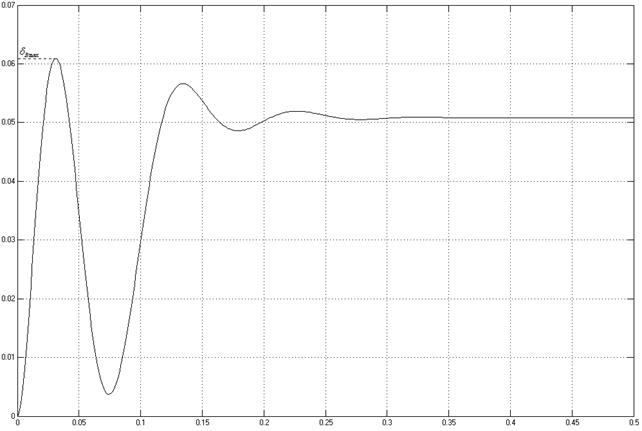
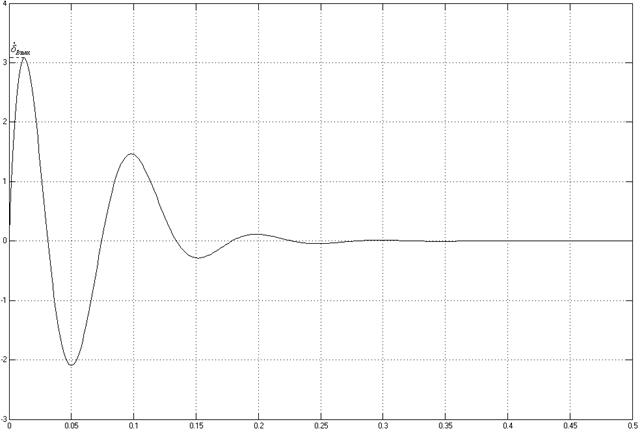
Моделирование проводится при максимальном значении входного сигнала (управления). Переходные процессы  и
и  снятые в точках после интеграторов, приведены на Рис.11, 12.
снятые в точках после интеграторов, приведены на Рис.11, 12.
По графикам определяем максимальные значения  и
и  :
:
 ;
;
 .
.
Для линейной модели РП справедлив принцип суперпозиции:
 , где (22)
, где (22)
– отклонение руля (суммарное);
 – динамическая составляющая отклонения руля;
– динамическая составляющая отклонения руля;
 – реакция руля на возмущения;
– реакция руля на возмущения;
 – отклонение руля при отработки сигнала управления.
– отклонение руля при отработки сигнала управления.
Для большинства ЛА последние два слагаемых выражения (22) изменяются медленно, поэтому в расчётах их будем полагать стационарными величинами, равными их установившимся значениям. Т.е.:
 ;
;
 .
.
Таким образом, максимальное значение отклонения руля
 ,
,
и при этом считаем
 .
.
|
|
|
из
5.00
|
Обсуждение в статье: Структурная схема нагруженной рулевой машинки. |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы