 |
Главная |


Особенности построения электропривода для конвейера
|
из
5.00
|
КУРСОВАЯ РАБОТА
По дисциплине: Системы управления электроприводами______________________
(наименование учебной дисциплины согласно учебному плану)
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
Тема: Проектирование системы управления электроприводом конвейерной установки
Автор: студент гр. ЭР-97-2 _____________ / Фадеев А.Г./
(подпись) (Ф.И.0.)
ОЦЕНКА: ________
Дата:_____________
ПРОВЕРИЛ
Руководитель проекта _профессор__ _____________ / Козярук А.Е. /
(должность) (подпись) (Ф.И.О.)
Санкт-Петербург
2002 г.
Министерство образования Российской Федерации
Санкт-Петербургский государственный горный институт
(технический университет)
УТВЕРЖДАЮ
Заведующий кафедрой ЭиЭ
профессор: /Козярук А.Е./
« » 2002г.
КУРСОВАЯ РАБОТА
По дисциплине: Системы управления электроприводами
ЗАДАНИЕ
Студенту группы: ЭР-97-2 Фадееву А.Г.
1. ТЕМА: Проектирование системы управления электроприводом конвейерной установки 2. Исходные данные: Основные параметры ЭП конвейерной установки,
3. Содержание пояснительной записки: Выбор силовой части электропривода, проектирование дискретной системы программного управления, проектирование системы автоматического регулирования, техническая реализация системы управления
4. Перечень графического материала: Схема силовой части электропривода, принципиальные схемы технической реализации ДСПУ и САР электропривода.
5. Срок сдачи законченной работы: 17.01 .2002
Руководитель проекта: профессор / Козярук А. Е/
Дата выдачи задания:
Аннотация
В курсовой работе по дисциплине «Системы управления электроприводами» выполнен синтез системы векторного управления электропривода ленточного конвейера, построена принципиальная схема системы управления, рассчитаны параметры настроек регуляторов системы управления. Исследованы динамические процессы в электроприводе при пуске, торможении.
Пояснительная записка содержит 38 страниц машинописного текста, включает 6 рисунков, список используемой литературы.
The Summary
In course work on discipline “ Control Systems of electric drives ” the synthesis of system of vector management of the electric drive of the tape conveyor is executed, the basic circuit of a control system is constructed, the parameters of adjustments of regulators of a control system are designed. The dynamic processes in the electric drive are investigated at start-up, braking.
The explanatory slip contains 38 pages of the typewritten text, includes 6 figures, list of the used literature.
Содержание:
Введение………………..5
1. Техническое задание…………….6
2. Особенности построения электропривода для конвейера…………10
3. Пуск электродвигателя конвейера………………….12
4. Функциональная схема электропривода…………..13
5. Используемая аппаратура управления и контроля………14
6. Параметры двигателя………………15
7. Уравнения для расчета параметров схемы замещения асинхронного электродвигателя ……………………………16
8. Обоснование алгоритмов управления для программной реализации ориентированием по полю ротора………………..16
8.1. Описание структурной схемы и назначение ее элементов………19
8.2. Алгоритм управления…………20
8.3. Управление потоком…………..22
8.4. Расчет параметров настроек регуляторов системы регулирования………….23
9. Алгоритм работы привода конвейера………..28
10. Синтез логического алгоритма работы системы управления и его программная реализация………………29
Список использованной литературы………………………35
Введение
Комплексная механизация и автоматизация технологических процессов, автоматизированные системы управления на базе вычислительных машин являются важной частью технического прогресса. Современное горное предприятие представляет собой сложный взаимосвязанный комплекс различных производственных механизмов, функционирование которых невозможно без применения современных систем управления электроприводом. Применение новых систем электропривода позволяет увеличить производительность машин и механизмов горного производства, снизить капитальные и эксплуатационные затраты, увеличить надежность и эффективность производственных процессов.
Все более широкое применение в промышленности получают автоматизированные системы управления электроприводом с использованием достижений электроники, преобразовательной и микропроцессорной техники.
Данный проект посвящен разработке системы управления электроприводом конвейерной установки с помощью системы векторного управления, на преобразовании частоты питающего напряжения двигателя, которая обеспечивает автоматическое и ручное управление работой конвейерной установкой в нормальном и аварийном режимах, защиту электропривода, автоматическое задание скорости вращения двигателя конвейерной установки в каждый момент времени, поддержание заданной скорости с заданной точностью, а также сигнализировать диспетчеру о нарушениях в работе привода и о срабатывании блокировок.
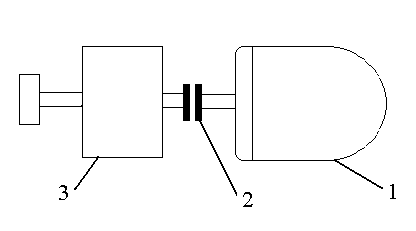
Привод конвейера предназначен для передачи крутящего момента электродвигателя на поступательное движение ленты конвейера и состоит из электродвигателя (1), редуктора (3) и связывающей их упругой муфты (2).
Работа привода заключается в следующем: включенный электродвигатель через муфту приводит в движение редуктор, на центральном валу которого устанавливается приводной барабан конвейерной установки.
 |
При увеличении или уменьшении нагрузки на приводе конвейерной установки, с реле тока, снимается напряжение отрицательной обратной связи, которое после преобразования на блоке преобразования сигналов, в виде выпрямленного стабилизированного сигнала, поступает на преобразователь частоты и соответственно уменьшает или увеличивает частоту вращения приводного двигателя конвейерной установки.
Техническое задание
Техническое задание на электропривод переменного тока для привода конвейера, находящегося на участке конвейерной линии, от пластинчатого питателя (П/П3) до приемного бункера корпуса средне - мелкого дробления.
Назначение электропривода и область применения:
Электропривод предназначен для привода конвейерной установки со следующими параметрами:
1.1. Назначение - транспортирование руды от пластинчатого питателя №3 до приемного бункера корпуса среднего дробления.
1.2. Технические параметры конвейерной установки:
1.2.1. Тип конвейера………………………………...……………………….КЛС-1600
1.2.2. Скорость движения ленты, м/с………………………………..……………..1,6
1.2.3.Полная длина конвейера, м…………..…………………………………….109,8
1.2.4. Угол наклона конвейера, градус…………………..………………………….16
1.2.5. Расчётная производительность, т/час………………………………..……...800
1.2.6. Диаметр приводного барабана, мм…..…………………………………….1250
1.2.7. Диаметр оборотного барабана, мм…………………………………..……...630
1.3. Техническая характеристика натяжного устройства
1.3.1. Тип…………………………..………………………………….160 - 100 Т - 160
1.3.2. Диаметр натяжного барабана, мм…………………………..……………...1000
1.4. Техническая характеристика ленты
1.4.1. Тип…………………….…..………………………...А - 1ОПБ - 5 ГОСТ 20 - 57
1.4.2. Ширина, мм…………………………………..…….………………………..1600
1.4.3. Число прокладок……………………………..…….……………………………7
1.4.4. Общая длина ленты с учётом склейки, мм……………………………....….225
1.5. Место установки конвейера……………………………..в закрытом помещении
1.6. Среда эксплуатации…………………………………………………….умеренная
Технические характеристики электропривода:
2.1. Преобразователя частоты (АТ03 – 200):
2.1.1. Назначение – для частотного управления приводным двигателем конвейера
2.1.2. Напряжения питания, кВ…………………………….…………………....3;6;10
2.1.3. Напряжение на выходе преобразователя частоты, В…………...…….……380
2.1.4. Максимальная мощность подключаемого электропривода, кВт…..…..….200
2.1.5. Частота питающей сети, Гц……………………….…………………..………50
2.2. Электродвигателя:
2.2.1. Тип двигателя..……………………………………………...……….4А355S6У4
2.2.2. Диапазон регулирования D………………………………………………….1 : 4
2.2.3. Номинальная мощность, кВт………………………………...………………160
2.2.4. Номинальная частота вращения, об/мин………………….…..…………...1000
2.2.5. Напряжение питания, В…………………………………………….…..…….380
2.2.6. Пусковые токи, А……….…………………………..………………..Imax = 7 Iном
2.2.7. Максимальный динамический момент…………...………….…Mmax =1,9 Mном
2.2.8. Пусковой момент….. …………………………...…………………….Mп = Mном
2.3. Требования к САУ:
2.3.1. Точность:
2.3.1.1. Статическая………………………………………………………….……±2 %
2.3.1.2. Динамическая….………………….…………….……………………….±10 %
2.3.3. Время переходного процесса (не более), с………………………..…………25
Требования по автоматизации:
3.1. Посты управления (ПУ):
3.1.1. Местное – со встроенного ПУ.
3.1.2. Дистанционное – с дистанционного ПУ.
3.1.3. Дистанционное – от локальных промышленных сетей, по каналу последовательной связи (использование CAN – интерфейса).
3.1.4. Дистанционное – от внешних органов управления, посредством набора программируемых, дискретных и аналоговых входов – выходов.
3.1.5. Дистанционное управление с централизованного ПУ.
3.2. Режимы работы:
3.2.1. Автоматическое управление (при автоматической подаче пускового импульса по разрешающим сигналам от аппаратов управления - в автономном режиме).
3.2.2. Ручное управление (осуществляется оператором по показаниям контрольных приборов).
3.2.3. Режим ревизии.
3.2.4. Режим тестирования (используется при наладке систем автоматики и сигнализации)
3.3. Основные функции системы автоматизации:
3.3.1. Выбор режима работы («Ручное», «Автоматическое», «Ревизия», «Тестирование»).
3.3.2. Контроль готовности к пуску, с выдачей сообщений о блокировках, препятствующих пуску.
3.3.3. Контроль блокировок, требующих автоматического останова системы после пуска.
3.3.4. Проверка существенного проскальзывания, схода и обрыва ленты и останов при выявлении несоответствия.
3.3.5. Контроль положения ленты с выдачей информации на пульт оператора.
3.3.6. Нормальный останов конвейера на заданных уровнях с заданной точностью.
3.3.7. Останов системы с контролируемым торможением и запрет нового цикла с выдачей информации оператору при нарушениях в работе.
3.3.8. Контроль удлинения ленты с выдачей сообщения при недопустимом её удлинении.
3.3.9. Задание программы изменения скорости движения ленты (скорости вращения вала двигателя) при автоматическом управлении.
3.3.10. Автоматический останов конвейера при обрыве кабель – тросового выключателя или срабатывании блокировок.
3.3.11. Сигнализация причины неисправности оператору.
3.4. Виды защит:
3.4.1. От токов недопустимой перегрузки и короткого замыкания.
3.4.2. От пробоя вентилей выпрямительного моста.
3.4.3. От замыкания на землю в низковольтной части электропривода.
3.4.4. От недопустимых отклонений регулируемого (в автоматическом режиме) технологического параметра.
3.4.5. От неполнофазного режима работы входных и выходных силовых цепей.
3.4.6. От неисправностей в системах питания и управления.
3.5. Виды блокировок:
3.5.1. Предусмотрены режимы ограничения максимальной и минимальной мощностей ЭП.
3.5.2. Внешние блокировки (контроль схода ленты, перегрева двигателя, появление негабарита и т.д.).
4. Условия эксплуатации:
4.1. Диапазон температур…………………………………….………….(-40, +30) 0С
4.2. Относительная влажность….………………...…….……………...80% при 250С
4.3. Коэффициент запыленности для двигателя…………………………...….7мг/м2
4.4. Электропривод устанавливается в помещениях категории………….…….….4
4.5. Шкафы управления в исполнении УХЛ, степень защиты…………..…......IP 64
4.6. Двигатель общепромышленного исполнения, степень защиты…..……….IP 54
4.7. Механические – удары, пыль, влажность, широкий диапазон температур
5. Требования к надежности:
5.1. Коэффициент готовности………………………………………..…………….0,98
5.2. Вероятность безотказной работы…………………………………..……..…..0,98
5.3. Гарантийный срок эксплуатации……………………………………..…..12500 ч
5.4. Среднее время между капитальными ремонтами…………………..…...31250 ч
6. Гарантии изготовителя:
6.1. Гарантийный срок службы……………………………….….….…………..2 года
6.2. Назначенный срок службы………..………………….…………..…………10 лет
6.3. Минимальное время между капитальными ремонтами….…..…………..5-7 лет
Особенности построения электропривода для конвейера
Т.к. конвейерная установка будет эксплуатироваться в шахтных условиях, то это приводит к появлению ряда специфических требований к её электроприводу.
Основным требованием, определяющим выбор электрического привода конвейера, является обеспечение приемлемых условий пуска и разгона тягового органа конвейера. Поэтому электропривод должен обладать высоким пусковым моментом, необходимым для преодоления статических усилий при пуске и создания динамического момента, обеспечивающего требуемое ускорение.
Необходимость больших пусковых моментов двигателей привода особенно сказывается в условиях шахты, так как установки подземного хозяйства шахт зачастую получают питание от "мягких" (из-за большой протяжённости кабельных линий) электрических сетей.
Величина момента статических сопротивлений при пуске может оказаться повышенной из-за того, что конвейер был остановлен под загрузкой. Вследствие этого пусковой момент конвейерного электропривода должен в 1,5-2 раза превышать номинальный.
Так же во время пуска должен осуществляться плавный разгон тягового органа (ленты) до требуемой скорости, так как возникающие значительные динамические перегрузки приводят к проскальзыванию ленты на приводном барабане, что резко увеличивает её износ. С другой стороны лента является эластичным элементом, поэтому передача усилия сопровождается упругим её удлинением. По мере достижения установившейся скорости всеми участками упругое натяжение ленты снижается. Возврат энергии, запасённой в растянутой ленте, может привести к возрастанию скорости отдельных её участков, по сравнению с установившейся, к колебаниям ленты. Такой характер переходного процесса в тяговом органе может вызвать повышенный износ ленты, а иногда и её разрыв.
Поэтому время пуска может достигать десятки секунд и должно задаваться в зависимости от длины става конвейера, производительности установки и с учётом других факторов. Из практического опыта эксплуатации ленточных конвейерных установок известна следующая эмпирическая зависимость: на каждые 1000 м длины става конвейера – tпуска=60 сек.
Для точного определения длительности пуска можно использовать формулу, приведенную в работе А.С. Соловьёва [2], в основе которой лежит зависимость динамического натяжения ленты от отношения длительности пуска конвейера ко времени распространения упругой волны натяжения по тяговому органу. По этому методу расчётная длительность пуска равна:
 ,
,
где 5 соответствует горизонтальным конвейерам; L - полная длина конвейера, м; Eэфф – эффективный динамический модуль упругости, отнесённый ко всему сечению ленты, кг (для тканевых лент его величина примерно в 50 раз превышает их прочность на разрыв).
Кроме увеличения плавности пуска конвейеров в некоторых случаях необходимо регулировать скорость электропривода.
Это требование обусловлено тем, что срок службы ленты во многом определяется её усталостной прочностью, т.е. способностью выдерживать определённое число перегибов при огибании барабанов.
При эксплуатации конвейеров в условиях шахты электропривод подвержен воздействию агрессивных шахтных вод, угольной и породной пыли, а также в рудничной атмосфере зачастую присутствуют взрывоопасные газы (метан, сероводород и др.).
Поэтому электродвигатели конвейерного привода должны иметь защищённое исполнение.
Для подземных ленточных конвейеров применяются двигатели в рудничном взрывобезопасном исполнении типов КО, серии ВАО, а также специальные электродвигатели для конвейеров ЭДКОФ во фланцевом исполнении. Также в рудничном взрывобезопасном исполнении должна быть и аппаратура управления.
Стеснённость пространства выработок налагает требования к габаритным размерам привода, что приводит к его дроблению (применению нескольких двигателей меньшей мощности вместо одного большой мощности).
Эти и ряд других требований необходимо учитывать при проектировании электроприводов ленточных конвейеров.
Электрические приводы современных рудничных скребковых и ленточных конвейеров чаще выполняются многодвигательными. Даже при одной приводной станции оказывается целесообразным, а в ряде случаев и необходимым применение не одного, а двух или большего числа двигателей.
Для рудничных скребковых конвейеров увеличение потребной мощности электропривода путем повышения мощности двигателя ограничено требованиями к его габаритам, поэтому более удобно увеличивать количество двигателей в приводе. Кроме того, при многодвигательном приводе проще решается задача изменения мощности привода в зависимости от длины конвейера. Это достигается изменением количества установленных двигателей.
|
из
5.00
|
Обсуждение в статье: Особенности построения электропривода для конвейера |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы