 |
Главная |


Асинхронного электродвигателя
|
из
5.00
|
ƒ = 50 Гц;  ;
;  ;
;  ;
;  ;
;  ;
;  ;
;  ;
;  ;
;  ;
;
 ;
;  ;
;  ;
;  ;
;  ;
;  ;
;  ;
;  ;
;  ;
;  ;
;  ;
;  ;
;  ;
;  ;
;  ;
;  ;
;  ;
;  ;
; 
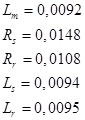
Расчетные параметры для схемы замещения:

Обоснование алгоритмов управления для программной реализации с ориентированием по полю ротора
В соответствии с техническим заданием разработан привод, который состоит из блока векторного управления, задатчика интенсивности, инвертора. В систему управления заключена модель двигателя.
Как известно, основная идея ориентирования потока заключается в приведении системы уравнений трехфазного АД к ортогональной системе координат 1, 2 вращающейся со скоростью вектора потока ротора, в которой переменные представляются, как установившиеся величины постоянного тока. Фазу и амплитуду тока статора регулируют так, чтобы составляющая тока Is1, определяющая поток, оставалась постоянной, а регулирование момента осуществлялось только изменением составляющей тока Is2, создающей момент двигателя.
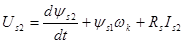
Уравнение статорной и роторной цепей АД во вращающейся со скоростью  системе координат имеют вид:
системе координат имеют вид:
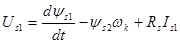


Если скорость вращения координат совпадает со скоростью вектора потока ротора  , то вектор
, то вектор  будет на оси 1 представлен своим модулем
будет на оси 1 представлен своим модулем  , а его проекция на ось 2 равна нулю и уравнения примут следующий вид:
, а его проекция на ось 2 равна нулю и уравнения примут следующий вид:

где m – число фаз, p – число пар полюсов, kr – коэффициент связи ротора, w - скорость вращения ротора.
Уравнения связи:
Из уравнений связи следует:
 (8.1)
(8.1)

 (8.2)
(8.2)
С учетом формул (1) и (2) уравнения АД примут вид:
 (8.3)
(8.3)
 (8.4)
(8.4)
 (8.5)
(8.5)
 где
где 
 (8.6)
(8.6)
Система управления должна стабилизировать поток ротора  и следовательно ток Is1.
и следовательно ток Is1.
Уравнения (8.3, 8.4, 8.5, 8.6) при этом упрощаются:
 (8.7)
(8.7)
(8.8)
 (8.9)
(8.9)
(8.10)
Из уравнения (8.9) следует закон формирования тока Is1:
 (8.11)
(8.11)
Из уравнения (8.6) следует закон формирования тока Is2:
 (8.12)
(8.12)
Из уравнения (8.10) определяется величина абсолютного скольжения:
 (8.13)
(8.13)
На основании определения скольжения необходима скорость вращения поля ротора:
 (8.14)
(8.14)
Скорость вектора напряжения статора определяется из следующего соотношения: 
где Q = аrctg  , или
, или  , где
, где 
Исследование системы управления на модели показало малое влияние второго слагаемого на переходные процессы, поэтому закономерно принять:
Уравнения (8.11, 8.12, 8.13, 8.14) служат основой для построения микропроцессорной системы управления приводом с ориентированием потока ротора. Управление с регулированием напряжения требует формирования ортогональных составляющих вектора напряжения по обратной модели двигателя, которые вычисляются с использованием формул (8.7, 8.8).
 (8.15)
(8.15)
 (8.16)
(8.16)
Модель электропривода показана на рис.1.
|
из
5.00
|
Обсуждение в статье: Асинхронного электродвигателя |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы