 |
Главная |


Расчёт параметров схемы регулятора тока
|
из
5.00
|
Воркутинский филиал УГТУ
КУРСОВАЯ работа
По _ ____ «Системы управления электроприводом»___ ____________
(дисциплина)
студента ____6___курса, группы ЭР-09_В
Кемлер П. А.______________________________
(Ф.И.О. студента)
Шифр_______________
Домашний адрес:
____________________
Проверил:___________/
(подпись)
_____________________/
(Ф.И.О. преподавателя)
Дата проверки________
Воркута 2014г.
Содержание:
1. Исходные данные...............................................................................................................3
2. Расчёт системы управления электроприводом...............................................................5
3. Контур тока........................................................................................................................5
4. Контур скорости................................................................................................................5
5. Моделирование СУЭП......................................................................................................7
6. Расчёт параметров схемы регулятора тока.....................................................................9
Исходные данные
номинальные мощность, напряжение, ток, скорость двигателя, момент, маховый момент :
Рном=32 квт;
Uном = 220 В,
Iном = 170 А,
nном=3500об/мин;
ωном = π* nном/30 =366 рад/с;
Мном =Рн/ ωном =87 Нм;
Мmax =2.3 Мном
Максимально допустимые ток и момент двигателя:
Imax = 2* Iном= 340 А,
Мmax = 200 Н∙м;
передаточный коэффициент и момент инерции двигателя
c = 0,7 В∙с/рад, J = 0,5кг∙м2;
Сопротивление обмотки якоря при 20 град С
Rя = 0,07 Ом,
максимальная ЭДС Eпmax = 300 В, коэффициент усиления kп= 25, и постоянная времени тиристорного преобразователя, Тп= 0,01 с;
передаточный коэффициент тахогенератора kТГ = kо.с = 0,032 В∙с/рад.
Индуктивность цепи якоря  , А
, А
Электромагнитная постоянная якоря


Рис. 1 Принципиальная схема регулятора тока на ОУ с цепью обратной связи по току
Где: RS- шунт;
ПР-преобразователь с гальванической развязкой силовой цепи и цепи управления; УДТЯ- усилитель датчика тока якоря,
РТ- регулятор тока.
Расчёт элементов цепи управления
Измерение тока в цепи якоря выполним с помощью шунта RS.
Шунт в цепи якоря выбираем в справочной литературе из условия, чтобы его номинальный ток был не меньше номинального тока двигателя. Номинальный ток двигателя Iн = 170 А.
Выбираем шунт на несколько больший номинальный ток, а именно
I шн = 200 А.
Соответствующее току Iшн (200А) номинальное напряжение шунта Uшн =75 мВ.
Тогда при 170 А потенциометрический сигнал ОС по току 70 мВ.
В качестве задатчика скорости выбираем потенциометр типа ППБ – 15 –1000 Ом c выходным напряжением UП = ±15 В. Поскольку напряжение задатчика тока
UЗ(max) = 10 В, то последовательно необходимо включить добавочный резистор, RДОБ = 500 Ом, на котором будет погашено излишнее напряжение.
Расчёт системы управления электроприводом
Контур тока
Принимаем пропорционально-интегральный тип регулятора тока с передаточной функцией  и параметрами Tкl =Тэ= Та = 0,05 с
и параметрами Tкl =Тэ= Та = 0,05 с
Для заданного токоограничения на уровне Imax = 340 А и максимального стабилизированного напряжения на входе контура тока uз.т. max = uнас = 10 В
определяем коэффициент обратной связи по току
 Ом
Ом
и постоянную интегрирования регулятора тока

 - минимальная постоянная времени в контуре.
- минимальная постоянная времени в контуре.
Контур скорости
Приступаем к расчёту внешнего контура – контура скорости.
В него входит звено преобразования момента двигателя в скорость вращения вала с учётом момента сопротивления на валу. Динамику этого преобразования оцениваем электромеханической постоянной времени:

 =
=  =0,0972с
=0,0972с
Действие противоЭДС двигателя на контур тока при пуске с насыщенным регулятором скорости снижает максимальный ток до значения
 А
А
При выборе типа регулятора скорости (П- или ПИ_ типа) следует учитывать допустимый по условию задачи статизм регулирования скорости, характеризующий жёсткость механической характеристики, который определяем по формуле:

Реальная величина статизма, соответствующего естественной механической характеристике электропривода, составляет

Следовательно, требуемое повышение жесткости механической характеристики

В данном случае пропорциональный регулятор скорости обеспечивает повышение жесткости

Поскольку 3,05>2,04 , то пропорциональный регулятор обеспечит требуемую жёсткость характеристики скорости. Его параметром является коэффициент пропорциональности

Моделирование СУЭП
Произведем поэтапно моделирование СУ электропривода в приложении Simulink.
Объектом управления СУЭП является модель ДПТ НВ.

Рис. 2 Модель контура тока
Произведем моделирование настроенного контура тока и переходный процесс в нем при единичном ступенчатом воздействии на нагрузке:
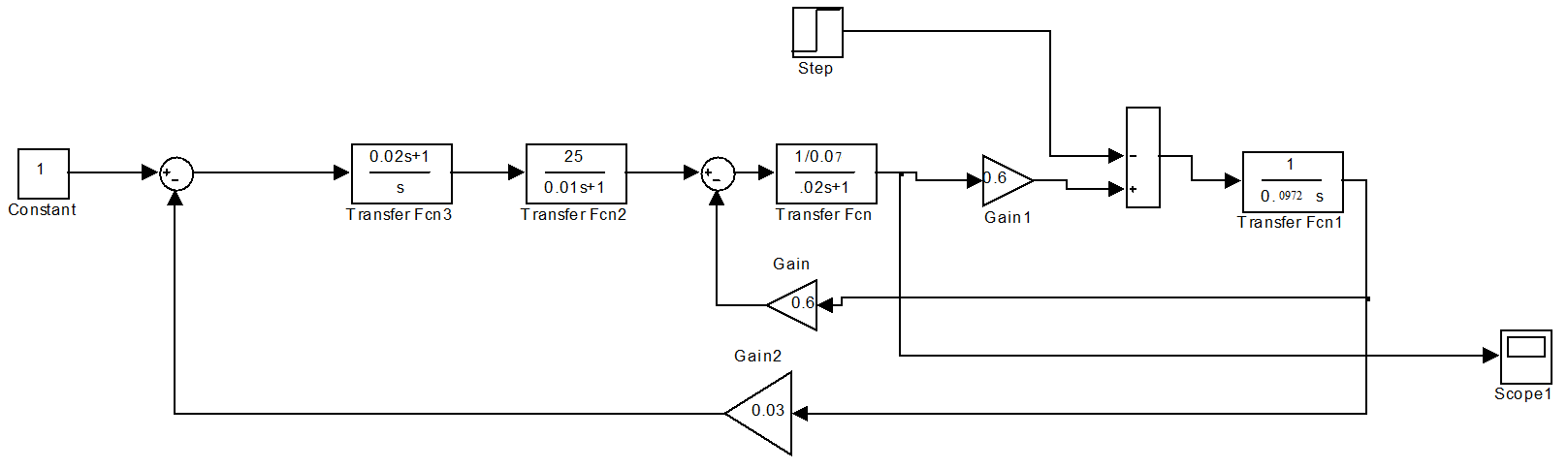
Рис. 3 Токовый контур с нагрузкой
Достроим к контуру тока главный контур скорости и покажем работу системы при изменении момента сопротивления:

Рис. 4 Модель двухконтурной СУЭП скорости

Для снижения перерегулирования в схеме с П- регулятором скорости применяют на входе фильтр в виде
Wф(s)= 1/(0.01s+1)

Рис. 5 Двухконтурная САУ стабилизации скорости с фильтром
Расчёт параметров схемы регулятора тока
Регуляторы в СУЭП реализуются на базе операционных усилителей с обратными связями. Принципиальная схема регулятора тока на ОУ показана на рис. 8
Рис. 6 Принципиальная схема регулятора тока на ОУ
Расчёт параметров схемы регулятора.
- Максимальное значение коэффициента усиления ТП в цепи якоря с СИФУ, выполненной по вертикальному принципу управления с пилообразным напряжением сравнения
Квпя=Ктп=25
- Электромагнитная постоянная времени цепи ТП – электродвигатель

- Электромеханическая постоянная времени

 = =0,0972с
= =0,0972с
- Передаточный коэффициент шунта в цепи якоря

- Коэффициент передачи датчика тока выбираем из условия
-

где  – максимально допустимое значение напряжения на выходе.
– максимально допустимое значение напряжения на выходе.
- Шунт в цепи возбуждения выбираем по номинальному току возбуждения электродвигателя. Выбираем шунт на ток IНШ = 5 А.
- Передаточный коэффициент шунта в цепи возбуждения
-

- Коэффициент регулятора тока
Kpт=0,02
11. Задаемся величиной ёмкости конденсатора в цепи обратной связи операционного усилителя регулятора тока

- Сопротивление резистора в цепи обратной связи операционного усилителя регулятора тока

- Сопротивление в цепи датчика тока


- Сопротивление в цепи задания тока находим из условий установившегося режима, в котором
 , откуда
, откуда  , считая
, считая 
- Коэффициент усилителя датчика тока якоря

 , тогда
, тогда

-
 , принимаем
, принимаем  , тогда
, тогда

Кемлер П. А.
«» _____________ 2014 года
|
из
5.00
|
Обсуждение в статье: Расчёт параметров схемы регулятора тока |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы