 |
Главная |


Кинематика зубчатых механизмов с подвижными осями
|
из
5.00
|
Планетарный зубчатый механизм
Планетарный зубчатый механизм уменьшает величины угловой скорости на выходном валу, т.е. является редуктором.
Планетарный редуктор отличается от простого зубчатого редуктора с неподвижными осями тем, что в состав его входит зубчатое колесо (одно или несколько), вращающееся вокруг подвижной оси водила, совершающего переносное движение.
Аналитический метод
Передаточное отношение в планетарных зубчатых механизмах рассчитывается по формуле Виллиса.
 (3)
(3)
где  - входное звено;
- входное звено;
 - выходное звено;
- выходное звено;
 - неподвижное звено.
- неподвижное звено.
Если входным звеном является водило, то сначала берут величину обратную:
 . (4)
. (4)
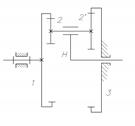
Существуют четыре схемы планетарных редукторов (рис.3).
 |
 |
Редуктор Джемса (рис.3а)
Если входное звено №1: при неподвижном звене №3
 ;
;
Если входное звено № H (водило): при неподвижном звене №3
 .
.
Если входное звено №3: при неподвижном звене №1
 .
.
Если входное звено №H: при неподвижном звене №1
 .
.
Редуктор имеет наименьшие габаритные размеры при  , и используется, как правило, в диапазоне передаточных отношений от 3 до 8, КПД при этом
, и используется, как правило, в диапазоне передаточных отношений от 3 до 8, КПД при этом  .
.
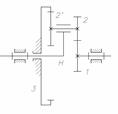
Редуктор со сдвоенными сателлитами (рис.3б)
Если входное звено №1: при неподвижном звене №3
 .
.
Если входное звено № H (водило): при неподвижном звене №3
 .
.
Если входное звено №3: при неподвижном звене №1
 .
.
Если входное звено №H: при неподвижном звене №1
 .
.
Передаточное отношение в таком редукторе зависит уже не от двух, а от четырех зубчатых колес и поэтому оно при тех же габаритных размерах может быть увеличено по сравнению с редуктором Джемса.
Механизм имеет смысл применять в диапазоне  , при
, при  по габаритным размерам этот редуктор мало отличается от редуктора Джемса, хотя конструкция его сложнее.
по габаритным размерам этот редуктор мало отличается от редуктора Джемса, хотя конструкция его сложнее.
КПД в указанном диапазоне  колеблется в пределах от 0,85 до 0,92.
колеблется в пределах от 0,85 до 0,92.
Следует учитывать, что выигрыш в размерах у планетарного редуктора по сравнению с простой многоступенчатой передачей происходит и благодаря применению нескольких сателлитов (или нескольких блоков сателлитов у редуктора №2), т.к. при этом уменьшается нагрузка на каждый зуб и можно применять меньший модуль колес.
Поэтому для силовых передач число сателлитов надо выбирать, возможно, большим (для не силовых передач увеличение числа сателлитов также желательно, т.к. увеличивает плавность передачи).
Если цилиндрические колеса заменить коническими, то планетарные механизмы становятся более компактными.
(Редуктор Джемса с коническими колесами можно применять для от 2 и выше, обычно  )
)
Редуктор Давида (рис.3 в,г)
Применяют для очень больших передаточных отношений (от 100 до 5000) в не силовых передачах, т.к. КПД этих редукторов очень низкий (<< 10 %). Редуктор №4 понижает скорость вращения только при передаче движения от водила к колесу 1. Редуктор с внутренним зацеплением колес имеет меньшие габаритные размеры по сравнению с редуктором, имеющим колеса с внешним зацепление представляет определенные трудности при малой разности чисел зубьев (особенно, когда разность равна 1).
Рис.3в
Если входное звено №1: при неподвижном звене №3
 .
.
Если входное звено № H (водило): при неподвижном звене №3
 .
.
Если входное звено №3: при неподвижном звене №1
 .
.
Если входное звено №H: при неподвижном звене №1
 .
.
Рис.3г
Если входное звено №1: при неподвижном звене №3
 .
.
Если входное звено № H (водило): при неподвижном звене №3
.
Если входное звено №3: при неподвижном звене №1
 .
.
Если входное звено №H: при неподвижном звене №1
.
Графический метод
На рис.4 показан графический способ определения угловых скоростей с помощью треугольников скоростей, если заданы число зубьев  ,
,  и угловая скорость
и угловая скорость 
 .
.
Задавшись произвольным отрезком Аа (рис.4), изображающим скорость  , строим треугольник скоростей колеса №1 (
, строим треугольник скоростей колеса №1 (  ).
).
Точка В является полюсом мгновенного вращения колеса №2 (  ). Следовательно, картиной скоростей этого колеса является
). Следовательно, картиной скоростей этого колеса является  . Отрезок
. Отрезок  изображает линейную скорость
изображает линейную скорость  оси
оси  колеса №2 и в то же время скорость точки, принадлежащей водилу H, поэтому для водила Н треугольник скоростей
колеса №2 и в то же время скорость точки, принадлежащей водилу H, поэтому для водила Н треугольник скоростей  .
.
На продолжении линии  откладываем произвольный отрезок РК (рис.4а) и проводим прямую
откладываем произвольный отрезок РК (рис.4а) и проводим прямую  . Через точку Р проводим лучи:
. Через точку Р проводим лучи:  ,
,  и
и  .
.
Получившиеся отрезки К1, К2 и КН изображают угловые скорости колес 1 и 2 и водила Н. Тогда угловые скорости:
|
 ;
;
 .
.
На рис.4б показано определение угловых скоростей звеньев в обращенном движении (при остановившемся водиле). Отрезки  ,
,  ,
,  изображают угловые скорости
изображают угловые скорости  ,
,  ,
,  колес 1, 2 и 3 в обращенном движении.
колес 1, 2 и 3 в обращенном движении.
 |
|
Пример 3.
Определить передаточное отношение механизма (рис.5) и скорость вращения выходного вала. Недостающие числа зубьев колес определить из условия соосности (табл.1), считая, что все колеса имеют один и тот же модуль и угол зацепления.
1. Из условия соосности определить недостающие числа зубьев колес.
2. Разбить механизм на отдельные ступени.
3. Определить передаточное отношение каждой ступени.
4. Определить передаточное отношение механизма в целом как произведение передаточных отношений отдельных ступеней.
5. Определить скорость вращения выходного вала
Исходные данные
| n1 (nH1) | Z1 | Z2 | Z3 | Z4 | Z5 | Z6 | Z7 | Z8 | Z9 | Z10 | Z11 | Z12 | Z13 | Z14 | Z15 |
| - | 65 | 45 | - | 50 | - |
 |
| Схема редуктора | 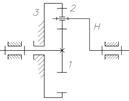
| 
| 
| 
|
| Передаточное отношение | 
| 
| 
| 
|
| Условие соосности | 
| 
| 
| 
|
| Условие соседства | 
| при  : :
 при :
при :
|
 (1)
(1)
| Обычно у этих редукторов один блок сателлитов |
| Условие сборки | 
| 
| 
| |
| (1) – Рассчитывается для пары с меньшим радиусом центрального колеса k – число сателлитов p – целое число полных поворотов водила N – любое целое число |
|

Решение:
1. Из условия соосности определяем недостающие числа зубьев колес.
Число зубьев зубчатого колеса №10 определяем из условия соосности для редуктора №2 (таблица 1).



2. Разбиваем механизм на отдельные ступени.
Первая ступень (рис.5) включает в себя звенья 1 и 2, вторая ступень включает в себя звенья 2 и 3, третья ступень – звенья 4 и 5, четвертая ступень это внутреннее зацепление зубчатых колес 6 и 7, пятая ступень это редуктор, состоящий из звеньев 8, 9 и 10 (блок сателлитов), 11 и Н (водило).

3. Определить передаточное отношение каждой ступени.
1-я ступень:  ;
;
2-я ступень:  ;
;
3-я ступень:  ;
;
4-я ступень:  (внутреннее зацепление);
(внутреннее зацепление);
5-я ступень:  ;
;
 ;
;
6-я ступень:  ;
;
4. Определить передаточное отношение механизма в целом как произведение передаточных отношений отдельных ступеней.
 ;
;
 .
.
5. Определить скорость вращения выходного вала
 ;
;
 (сек.-1).
(сек.-1).
|
из
5.00
|
Обсуждение в статье: Кинематика зубчатых механизмов с подвижными осями |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы