 |
Главная |


Алгоритм аналогового регулирования «РАН»
|
из
5.00
|
Алгоритм используется при построении ПИД регулятора, имеющего аналоговый выход. Алгоритм, как правило, сочетается с пропорциональным исполнительным устройством либо используется в качестве ведущего в схеме каскадного регулирования.
Помимо формирования ПИД закона в алгоритме вычисляется сигнал рассогласования, этот сигнал фильтруется и вводится зона нечувствительности. Выходной сигнал алгоритма ограничивается по максимуму и минимуму. Алгоритм содержит узел настройки, позволяющий автоматизировать процесс настройки регулятора [6].
Функциональная схема алгоритма показана на рисунке 9.
Алгоритм содержит следующие звенья. Звено 3 суммирует два входных сигнала, при этом один из сигналов масштабируется звеном 1, фильтруется звеном 2 и инвертируется. Сигнал рассогласования на выходе этого звена (без учета фильтра) равен  где Км – масштабный коэффициент.
где Км – масштабный коэффициент.
Фильтр низких частот представляет инерционное звено первого порядка с передаточной функцией:
 , (1)
, (1)
где Тф – постоянная времени фильтра.
Элемент 4, реализующий функцию "зона нечувствительности", не пропускает на свой вход сигнал, значение которого находится внутри установленного значения зоны. Сигнал  формируется в соответствии с условием:
формируется в соответствии с условием:
 при
при 
 при
при  , (2)
, (2)
где  - заданное значение зоны нечувствительности.
- заданное значение зоны нечувствительности.
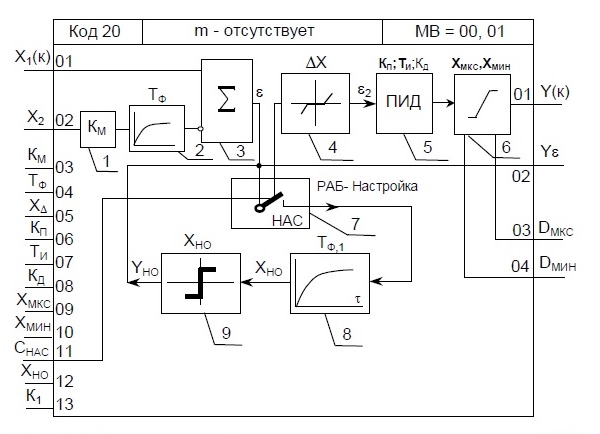
Рисунок 7- Структурная функциональная схема РАН
Звено 5 - ПИД, выполняет пропорционально - интегрально- дифференциальное преобразование сигнала и имеет передаточную функцию:
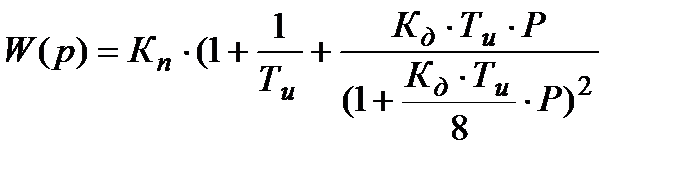 , (3)
, (3)
где Kп - коэффициент пропорциональности,
Ти - постоянная времени интегрирования
Кд - коэффициент дифференцирования, равный Кд=Тд/Ти (при Кд-Ти>819 значение Тд=∞).
Алгоритм РАН может использоваться в качестве ПД - или П - регулятора . В ПД -регуляторе устанавливается Ти=∞. Если этот параметр установлен оператором вручную в режиме программирования, то интегральная ячейка аннулируется и при переходе в режим работы алгоритм формирует передаточную функцию:
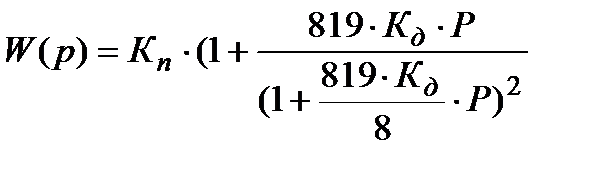 (4) .
(4) .
При этом если КД ≤1 постоянная времени дифференцирования ТД=819-КД (с, мин или час в зависимости от выбранного диапазона и масштаба времени ), если КД>1‚ то ТД=∞. Если используется автонастройка и в процессе автонастройки устанавливается ТИ=∞‚ то также формируется передаточная функция, но интегральная ячейка сохраняется, а сигнал этой ячейки замораживается и добавляется к выходу ПД звена как постоянное смешение. Для получения П - регулятора следует установить Ти=∞ и Кд=0. Свойства интегральной ячейки при этом остаются такими же, как в ПД - регуляторе. Ограничитель 6 ограничивает выходной сигнал алгоритма по максимуму и минимуму. Уровни ограничения устанавливаются коэффициентами Хмакс и Хмин . Помимо двух сигнальных входов X1 и X2 алгоритм имеет 8 настроечных входов, которые задают параметры настройки алгоритма [6].
Алгоритм содержит узел настройки, состоящий из переключателя режима 7 "работа - настройка", нуль-органа 9 и дополнительного фильтра 8 с постоянной времени Тф,1 . Свойства нуль-органа описываются выражением:
 при
при  , (10)
, (10)
 при
при  ,
,
где YНО – сигнал на выходе нуль-органа.
При дискретном сигнале на входе Снас=1 алгоритм переходит в режим настройки и в замкнутом контуре регулирования устанавливаются автоколебания. Параметры этих колебаний (амплитуда и период ), которые контролируются на выходе Y  , используются для определения параметров настройки регулятора. Для перехода в режим работы устанавливается сигнал Снас=0.
, используются для определения параметров настройки регулятора. Для перехода в режим работы устанавливается сигнал Снас=0.
Алгоритм имеет 4 выхода. Выход Y - основной выход алгоритма. На выходе Y формируется отфильтрованный сигнал рассогласования. Два дискретных выхода Dмкс и Dмин фиксируют момент наступления ограничения выходного сигнала Y. Алгоритм будет правильно работать, только если Хмкс>Хмин. Наименование входов - выходов алгоритма РАН приведено в таблице 8.
Алгоритм относится к группе следящих. Команда отключения вместе со значением начального условия Y0 поступает на каскадный выход Y алгоритма. В режиме отключения работа алгоритма изменяется следующим образом:
1) на выходе интегральной ячейки ПИД звена устанавливается значение Yи=Y0·Кп - 2‚ где
2 -определяется выражением;
2) Д- составляющая обнуляется;
3) при выполнении необходимых условий входной сумматор переходит в режим обратного счета ‚ при этом на каскадном входе Х1(К) формируется команда отключения и устанавливается значение начальных условий X0=Kм-X2. Эти сигналы передаются предвключенному алгоритму.
В режим запрета алгоритм переходит в двух случаях:
1) по собственной инициативе, когда выходной сигнал ПИД вышел за установленные пороги ограничения;
2) если команда запрета поступает извне на каскадный выход Y.
B любом случае в режиме запрета выполняются следующие операции:
1) блокируется изменение И - составляющей ПИД - звена в запрещенном направлении;
2) при выполнении необходимых условий на каскадном входе X1 формируется команда запрета, которая передается предвключенному алгоритму.
В остальном работа алгоритма в режиме запрета не изменяется. При работе в отключенном режиме сигнал Y0 пришедший на выход алгоритма в процедуре обратного счета может выйти за пороги ограничения. Ограничитель не препятствует этому, но после перехода в стандартный режим изменение выходного сигнала возможно лишь в направлении, приближающим выходной сигнал к установленным порогам ограничения. Если выходной сигнал изменяется именно в этом направлении, команда запрета не формируется. В противном случае формируется команда запрета, которая через вход Х1 транспортируется предвключенному алгоритму. После того, как выходной сигнал выйдет из области ограничения и вернется на линейный участок, выходной сигнал вновь может изменяться в обоих направлениях [6].
Таблица 6 – Входы-выходы алгоритма РАН(20)
| Входы - выходы | Назначение входа - выхода алгоритма | ||
| № | Обозн. | Вид | |
| X1 | Вход | Немасштабируемый вход (каскадный) | |
| Х2 | Масштабируемый вход | ||
| Км | Масштабный коэффициент | ||
| Тф | Постоянная времени фильтрации | ||
| Хд | Зона нечувствительности | ||
| Кп | Коэффициент пропорциональности | ||
| Ти | Постоянная времени интегрирования | ||
| Кд | Коэффициент дифференцирования | ||
| Хмкс | Уровень ограничения по максимуму | ||
| Хмин | Уровень ограничения по минимуму | ||
| Снас | Команда перехода в режим настройки | ||
| Хно | Уровень сигнала на выходе нуль - органа | ||
| К1 | Коэффициент, устанавливаемый в зависимости от свойств объекта | ||
| У | Выход | Основной сигнал алгоритма (каскадный) | |
| Ye | Сигнал рассогласования |
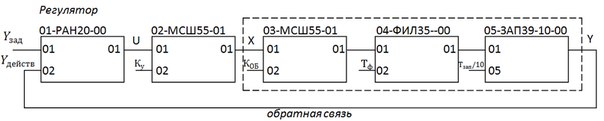
Рисунок 8 – Схема конфигураций алгоритмов с самовыравниванием и транспортным запаздыванием
Для построения переходного процесса, составляются таблицы 7, 8 и 9.
Таблица 7 – Состав конфигурации
| Номер алгоритма | Код алгоритма | Название алгоритма | Модификатор | Масштаб времени |
| РАН | - | |||
| МСШ | - | |||
| МСШ | - | |||
| ФИЛ | - | |||
| ЗАП | ||||
Таблица 8 – Конфигурирование алгоблоков
| Номер алгоблока приемника | Номер входа алгоблока приемника | “инверсия” | Номер алгоблока источника | Номер выхода алгоблока источника |
| т.п. | ||||
| т.п. | ||||
| т.п. | ||||
| т.п. | ||||
| т.п. |
Таблицы 9 – Настройка алгоритмов
| Номер алгоритма | Название алгоритма | Номер настройки входа | Название параметра настройки | Численное значение |
| РАН | Xз | 50%, 60% | ||
| МСШ | Км | |||
| МСШ | Коб | |||
| ФИЛ | Тоб | |||
| ЗАП | 
| 0,8 | ||
| РАН | Ти | 19,4 | ||
| РАН | Кд | 0,41 | ||
| РАН | Хмах | |||
| РАН | Хmin | |||
| РАН | Кп | 3,328 |
Значения коэффициента пропорциональности КП, ТИ - постоянной времени интегрировании и КД - коэффициента дифференцирования рассчитываются по формулам:
 (5)
(5)
 , (6)
, (6)
 . (7)
. (7)
Качество работы САУ является одной из важнейших её характеристик. Для оценки уровня качества работы системы, в ТАУ введены количественные оценки качества. Получить общую оценку качества в виде функциональной зависимости от множества структурных, технических эксплуатационных характеристик системы достаточно сложно. Поэтому о качестве САУ судят в первую очередь по запасу устойчивости и виду переходного процесса в системе. Под устойчивостью САУ подразумевается её свойство возвращаться в исходное состояние после вывода ее из этого состояния (или останавливаться в одном из состояний) после прекращения влияния задающего или возмущающего воздействий. Иначе говоря, затухание переходных процессов в системе является необходимым требованием качественной системы, но не достаточным условием практической пригодности [6].
К автоматическим системам регулирования предъявляются требования не только устойчивости процессов регулирования во всем диапазоне нагрузок на объект. Для работоспособности системы не менее необходимо, чтобы процесс автоматического регулирования осуществлялся при обеспечении определенных качественных показателей. Такими показателями являются: статическая ошибка регулирования ео; время регулирования tp2; время первого достижения заданного значения tp1; перерегулирование Ϭ; степень затухания колебаний ψ [6].
В промышленных САУ оценки показателей качества переходных процессов обычно определяют по экспериментальной траектории переходного процесса регулирования при возмущении по заданию.
Статическая ошибка регулирования – отклонение регулируемой величины от заданного значения по окончании переходного процесса.
Динамическая ошибка регулирования характеризуется максимальным отклонением выходной величины в переходном режиме от нового установившегося значения.
По полученным данным составляется таблица 10 и строится график представленный на рисунке 9.
Таблица 10- Экспериментальные данные при изменении задания
| t, c | Y(t) | t, c | Y(t) | t, c | Y(t) | t, c | Y(t) | t, c | Y(t) |
| 48,91 | 59,85 | 62,28 | 59,19 | 59,83 | |||||
| 48,95 | 60,62 | 61,96 | 59,14 | 59,91 | |||||
| 49,24 | 61,43 | 61,71 | 59,11 | 59,98 | |||||
| 49,74 | 62,01 | 61,4 | 59,11 | 60,04 | |||||
| 50,5 | 62,46 | 60,98 | 59,13 | 60,11 | |||||
| 51,4 | 62,8 | 60,66 | 59,17 | 60,16 | |||||
| 52,41 | 63,04 | 60,42 | 59,24 | 60,2 | |||||
| 53,46 | 63,12 | 60,19 | 59,31 | 60,22 | |||||
| 54,69 | 63,15 | 59,92 | 59,41 | 60,25 | |||||
| 55,96 | 63,14 | 59,71 | 59,49 | 60,26 | |||||
| 57,09 | 63,2 | 59,52 | 59,58 | 60,26 | |||||
| 57,97 | 62,84 | 59,38 | 59,66 | 60,26 | |||||
| 58,88 | 62,6 | 59,27 | 59,75 | 60,26 |
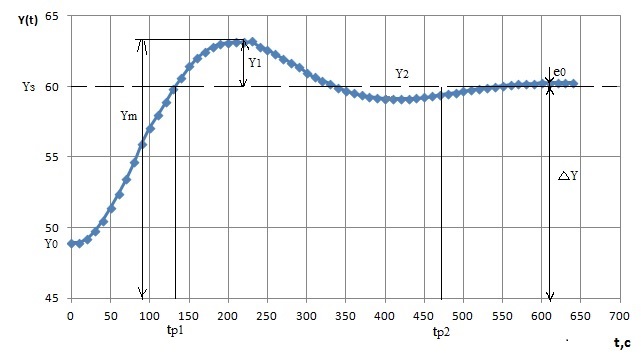
Рисунок 9 - Переходный процесс при изменении задания
По графику, представленному на рисунке 9, определяем показатели качества:
Yз =60 – заданное значение, tp2=450 c, Ym=63,2,
ео=0,04, tp1=130 c, Y0=48,91,
Y1=3,2, Y2=0, ∆Y=Y∞=60,4.
Степень затухания колебаний:
 . (8)
. (8)
Показатель перерегулирования:
 . (9)
. (9)
Таблица 11- Экспериментальные данные при изменении возмущения
| t, c | Y(t) | t, c | Y(t) | t, c | Y(t) | t, c | Y(t) | t, c | Y(t) |
| 59,13 | 58,48 | 59,65 | |||||||
| 58,06 | 58,95 | 60,88 | 59,66 | ||||||
| 57,16 | 59,35 | 60,76 | 59,69 | ||||||
| 56,54 | 59,77 | 60,63 | 59,7 | ||||||
| 56,12 | 60,08 | 60,51 | 59,74 | ||||||
| 55,78 | 60,42 | 60,38 | 59,76 | ||||||
| 55,61 | 60,64 | 60,25 | 59,8 | ||||||
| 55,55 | 60,85 | 60,14 | 59,85 | ||||||
| 55,6 | 61,02 | 60,02 | 59,88 | ||||||
| 72,12 | 55,77 | 61,16 | 59,93 | 59,92 | |||||
| 68,06 | 56,01 | 61,24 | 59,85 | 59,94 | |||||
| 66,05 | 56,35 | 61,27 | 59,76 | 59,98 | |||||
| 64,63 | 56,79 | 61,26 | 59,69 | ||||||
| 62,91 | 57,21 | 61,24 | 59,66 | 60,05 | |||||
| 61,62 | 57,64 | 61,18 | 59,64 | 60,05 | |||||
| 60,46 | 58,1 | 61,09 | 59,64 | 60,05 |
Для получения переходного процесса при возмущении со стороны нагрузки в режиме «программирование» в процедуре «Н.УСЛ» (начальные условия), изменили значение выхода интегратора на 20 % и получили следующий переходный процесс, представленный на рисунке 10.
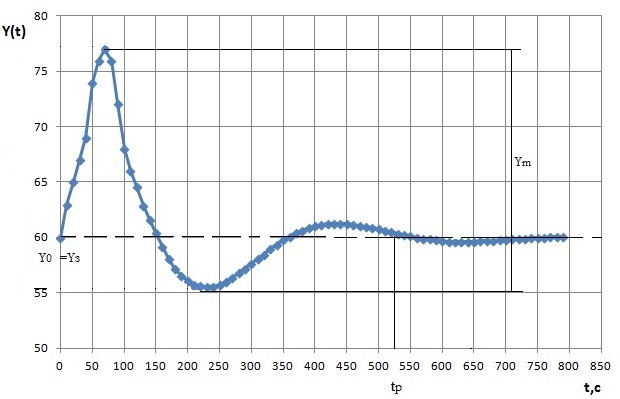
Рисунок 10- Переходный процесс при изменении возмущения
По графику, представленному на рисунке 10, определяем показатели качества:
Yз = Y0= 60 – заданное значение;
tp=530 c;
Ym=21,45.
|
из
5.00
|
Обсуждение в статье: Алгоритм аналогового регулирования «РАН» |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы