 |
Главная |


Глава 6. ДИСТАНЦИОННОЕ УПРАВЛЕНИЕ И ОСНОВЫ ТЕЛЕМЕХАНИКИ
|
из
5.00
|
6.1. Назначение систем дистанционного управления и телемеханики
Под дистанционным управлениемпонимают ручное управление на расстоянии регулирующими и запорными органами или отдельными механизмами, осуществляемое гидравлическим, пневматическим или электрическим способом. В СВВ наибольшее распространение имеет электрическое дистанционное управление. В этом случае электродвигатель или электромагнит монтируют на регулирующем органе, а аппарат управления электродвигателем располагают на некотором расстоянии от него в пункте, удобном для обслуживающего персонала. Дистанционное управление механизмами осуществляется на расстоянии от десятков до сотен метров. Так, например, включается электродвигатель насоса с помощью магнитного пускателя. С увеличением расстояния переходят к использованию средств телемеханики, позволяющих по малому числу линий связи передавать большое число команд.
Телемеханика— это область техники, охватывающая теорию и практику устройств передачи информации и управления на расстояние. В ряде случаев телемеханические системы дополняют системы автоматического управления и совместно решают общие задачи автоматизации технологических процессов.
Системы телемеханики выполняют три основные функции: телеизмерение, телеуправление и телесигнализацию.
Телеизмерениеосуществляется с помощью систем ближнего действия (на расстояниях до 15 км) и систем дальнего действия (на расстояниях до сотен км). В системах ближнего действия, основанных на методе интенсивности, контролируемая величина преобразуется в значение силы тока или напряжения, передаваемого по линии связи, а в системах дальнего действия — передается в виде импульсов постоянного тока или изменяющейся частоты переменного тока.
Телеуправлениеи телесигнализацияосуществляются многоканальными системами ближнего действия или системами дальнего действия с малым числом каналов связи. В этих системах используются одинаковые способы передачи сигналов и одни и те же устройства, при этом сигналы управления и информационные сигналы зашифровываются на диспетчерском пункте с помощью специальных шифраторов и поступают в передатчик, посылающий в линию связи импульсы электрического тока определенного вида (код). Эти импульсы на приемном пункте воспринимаются специальным устройством и расшифровываются дешифратором, передающим полученный сигнал в схему управления тем или иным механизмом.
В системах телеуправления и телесигнализации используются следующие качественные признаки импульсов тока: полярность, амплитуда, продолжительность импульса, частота переменного тока.
В СВВ системы телеизмерения применяют для передачи значений технологических параметров на диспетчерский пункт. К таким параметрам относятся: расходы подаваемой насосами жидкости; давление в основных точках сети, характеризующее ее состояние; уровень воды в резервуарах, определяющих запас воды и режим работы станций; сила тока в цепях приводных электродвигателей, характеризующая нагрузку насосов; напряжение в электрических сетях, определяющее режим работы электрооборудования, и др.
Системы телеуправления используют для пуска и останова на расстоянии (из диспетчерского пункта) насосных агрегатов, включения и отключения коммутационных устройств электросети, включения и отключения воздуходувок, дробилок и др. Возможность осуществления этих операций на расстоянии позволяет диспетчеру без помощи дежурного персонала быстро вводить в действие или выводить из работы соответствующие агрегаты как в условиях нормальной эксплуатации, так и при аварии с целью ее локализации.
Телесигнализация используется для автоматической передачи сигналов о состоянии насосных агрегатов, задвижек, фильтров, дробилок и других агрегатов сооружений. На мнемосхеме, находящейся на щите диспетчерского пункта, непрерывно указывается состояние оборудования агрегатов, а также изменение значений параметров. Это позволяет диспетчеру легко ориентироваться при осуществлении оперативных переключений, особенно во время аварий.
6.2. Методы и средства телеизмерения
Особенность телеизмерения заключается в том, что измеряемая величина до ее передачи преобразуется в другую величину, удобную для передачи без искажений на расстояние. На диспетчерском пункте происходит обратное преобразование поступившего сигнала в измеряемую величину. Поэтому отличие одного метода телеизмерения от другого состоит в сущности в способе преобразования сигналов при их передаче.
Для передачи сигналов на небольшие расстояния в системах ближнего действия применяется метод интенсивности, по которому измеряемая величина передается путем изменения интенсивности тока или напряжения в канале связи. Для снижения потерь энергии в линии передача сигналов производится при малых значениях силы тока и напряжения. Передачу целесообразнее вести на постоянном токе, поскольку при этом такие параметры линии, как индуктивность и емкость проводов, не сказываются
на уровне сигнала.
В системах дальнего действия применяют методы импульсной и частотной передачи сигнала, в которых измеряемая величина преобразуется в импульсы постоянного тока либо в переменный ток меняющейся частоты, в результате чего изменения сигнала, возникающие в канале связи, не вносят искажений в величину
измеряемого параметра.
Увеличения количества передаваемых сигналов электрического тока добиваются применением различных способов их модуляции (амплитудной, частотной, временной и числовой). При выборе конкретного способа модуляции учитывают сложность преобразования сигнала и условия его передачи на расстояние. Чаще других используют две схемы телеизмерения.
Первая из них — телеизмерительная схема интенсивности токаближнего действия с реостатным датчиком Д (рис. 77) основана на использовании перемещения ползунка ПИ-реостата Л измерительным прибором Я одновременно со стрелкой на угол оц,. Изменения тока в линии связи, пропорциональные измеряемой величине, фиксируются вторичным прибором ВП. Для уменьшения влияния изменения сопротивления линии связи включается балластное сопротивление R^, значительно превышающее сопротивление проводов. Поскольку для передвижения ползунка реостата необходимо большое усилие, данная схема чаще всего применяется при телеизмерении расходов, давления и уровня. Это связано
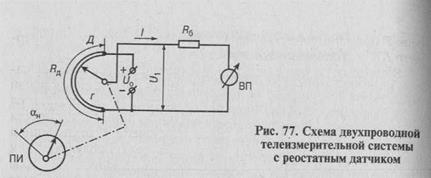
с тем, что измерительные приборы, контролирующие перечисленные параметры, развивают значительные вращающие моменты.
Вторая схема время-импульсного телеизмерения(рис. 78) дальнего действия основана на посыле сигналов в виде импульсов определенной продолжительности или на использовании пауз разной продолжительности между двумя импульсами. В этой схеме передающее устройство ПУ представляет собой синхронный двигатель 7, на вал 2 которого насажены два медных полукольца 3, изолированных от вала и друг от друга. К полукольцам прикасаются две металлические или графитовые щетки, одна из которых 4 неподвижна, а другая 5 имеет кинематическую связь с измерительным прибором ИЭ. К щеткам линии связи ЛС подключено

|
реле Р приемного устройства УП, использующего миллиамперметр ПП магнитоэлектрической системы.
В процессе работы синхронный двигатель непрерывно вращается с постоянной скоростью. Когда щетка 5 находится в одной плоскости со щеткой 4 (как показано на рис. 78), вращающиеся полукольца 3 не могут замкнуть цепь питания линии связи от сети с напряжением 111, т.е. линия связи обесточена. С отклонением измеряемого параметра щетка 5 перемещается по полукольцу 3 к щетке 4. В связи с этим в линию связи посылаются импульсы продолжительностью, пропорциональной степени перемещения щетки 5 или величине параметра.
Реле приемного устройства при замыкании своих контактов посылает к прибору импульсы напряжением U такой же продолжительности, как и импульсы в линии связи. Шкала прибора, измеряющего среднее значение импульсов тока, градуируется в единицах измеряемой величины. Сопротивление R приемного устройства ограничивает ток в цепи прибора, а конденсатор С выполняет роль фильтра.
6.3. Методы и схемы телеуправления и телесигнализации
Управление любыми протяженными объектами практически невозможно без контроля их состояния, в связи с чем функции телеуправления и телесигнализации в СВВ осуществляются общими средствами телемеханики. Принятые при этом схемы отличаются в основном методом избирания в приеме и расшифровке сигналов, которые передаются параллельно и последовательно во времени. Первый способ связан с качественным и комбинационным методами избирания, второй — с распределительным и комбинационно-распределительным.
В зависимости от методов избирания различают многопроводныеи малопроводные схемы,которые по виду раздельной передачи сигналов и устройству линий связи делят на три группы.
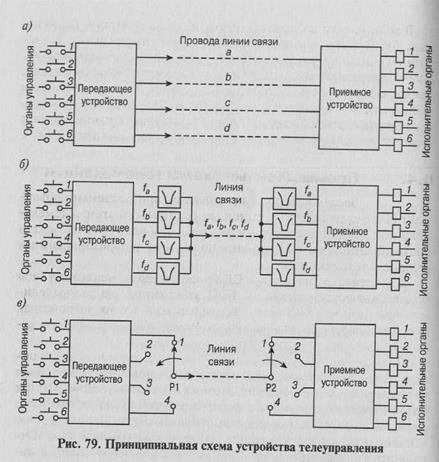
Многопроводные схемы с разделением сигналов (рис. 79, а) обычно применяют при сравнительно небольших расстояниях между диспетчерским пунктом и объектом управления. При наличии n-го количества самостоятельных проводов (не считая провод питания) по такой линии связи можно передать сигналы:
N=Кп, (6.1)
где К— число импульсных признаков; обычно К= 2-4.
|
Таким образом, в многопроводных схемах для каждого импульса имеется отдельный канал (провод), и поэтому все импульсы могут передаваться одновременно. Для разделения импульсов управления и сигнализации применяется амплитудный признак, в соответствии с которым ток импульса управления в несколько раз превышает ток импульса сигнализации.
В малопроводных схемах с частотным разделением сигналов (рис. 79, б) последние передаются по одной линии связи за счет использования импульсов разной частоты f ...fа. В передающей части этих систем имеется генератор синусоидальных колебаний разной частоты, а в приемной части сигналы разделяются с помощью полосовых фильтров. Для увеличения числа передаваемых сигналов часто применяют передачу каждого сигнала на двух частотах с соответствующей их комбинацией.
В малопроводных схемах с временным разделением сигналов (рис. 79, в) последние передаются по одной линии связи с поочередным посылом импульсов тока с помощью распределителей. В качестве распределителей Р1 и Р2 применяются переключатели, приводимые в действие электродвигателями, электромагнитные шаговые реле и катодные переключатели. Два синхронно работающих распределителя одновременно подключают линию связи к соответствующим передающему и приемному устройствам схемы.
6.4. Промышленные схемы телемеханики
Задачи контроля и управления протяженными объектами обычно решаются с помощью серийных систем телемеханики общепромышленного назначения. Для различных объектов промышленностью выпускается целый ряд унифицированных устройств телемеханики.
В практике эксплуатации СВВ хорошо зарекомендовали себя телемеханические устройства БТЦ, основанные на распределительном методе избирания. Распределитель в этих устройствах построен на феррит-транзисторных элементах, состоящих из магнитных деталей и полупроводниковых триодов.
Полярно-амплитудное разделение сигналов положено в основу телемеханических схем управления насосными станциями артезианского водоснабжения. Телемеханические устройства этих схем позволяют передавать с диспетчерского пункта на насосную станцию следующие команды телеуправления: «Пустить насос», «Остановить насос», «Включить контактный манометр» и «Отключить контактный манометр». На диспетчерский пункт с насосной станции передаются сообщения телесигнализации «Насос работает», «Насос не работает», «Произошла авария», «На станции нет электроэнергии», «На станции посторонние люди», а также сигналы двустороннего вызова телефонного разговора. С помощью электроконтактного манометра осуществляется телеизмерение давления в напорных водоводах и ряде точек водопроводной сети.
На насосной станции импульсы управления воспринимаются схемой автоматики, которая осуществляет пуск и останов насосов в заданной последовательности, защиту оборудования, включает резервное питание и резервный насос. Пуск и останов агрегата производятся автоматически по сигналу датчика или диспетчером с помощью телеуправления. Цепи автоматики и телемеханики электрически не связаны и питаются от разных источников тока.
За счет применения тока разной полярности, разной величины и передачи сигналов по двум каналам связи (по одной паре телефонных проводов и земле) схема позволяет передавать и принимать восемь основных и два неосновных сигнала.
В СВВ применяется также серийное время-импульсное устройство телемеханики типа УТБ, которое используют при различном расположении объектов (последовательном, радиальном) по отношению к диспетчерскому пункту.
Бесконтактная система с временным разделением сигналов типа ТМЭ позволяет обслуживать 5—40 объектов управления, 14—40 объектов сигнализации и 6—28 объектов измерения. Основными аппаратурными блоками этой системы являются распределители на магнитных элементах, которые поочередно синхронно и синфазно подключают к линии связи электрические схемы на диспетчерском пункте управления. Введенная в систему защита от исполнения ложных команд обеспечивает ее высокую надежность.
В последние годы разработаны комплекты унифицированных устройств телемеханики в малогабаритном блочно-модульном исполнении. Начался выпуск средств телемеханики на базе микропроцессоров, разработаны системы телеавтоматики с выводом оперативной информации на ЭВМ. Так, комплекс средств телеавтоматики типа КЭТ обеспечивает: телеизмерение, телеуправление и телесигнализацию с 48 контрольными пультами; дальность действия до 30 км.; вывод информации на телетайп и сопряжение с ЭВМ верхнего уровня.
|
из
5.00
|
Обсуждение в статье: Глава 6. ДИСТАНЦИОННОЕ УПРАВЛЕНИЕ И ОСНОВЫ ТЕЛЕМЕХАНИКИ |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы