 |
Главная |


КОНСТРУКТИВНЫЕ ОСОБЕННОСТИ ОСНОВНЫХ УЗЛОВ УКЛАДОЧНОГО ОБОРУДОВАНИЯ
|
из
5.00
|
Структурная схема машин для укладки штучных грузов в ящики, гофрокороба и тару-оборудование аналогична рассмотренной выше структурной схеме пакетоформирующих машин, поскольку включает те же операции. Следовательно, и исполнительные механизмы укладочных машин имеют незначительные конструктивные отличия от выполняющих аналогичные операции исполнительных механизмов ПФМ.
Рассмотрим конструктивное исполнение основных узлов пакетоформирующих машин.
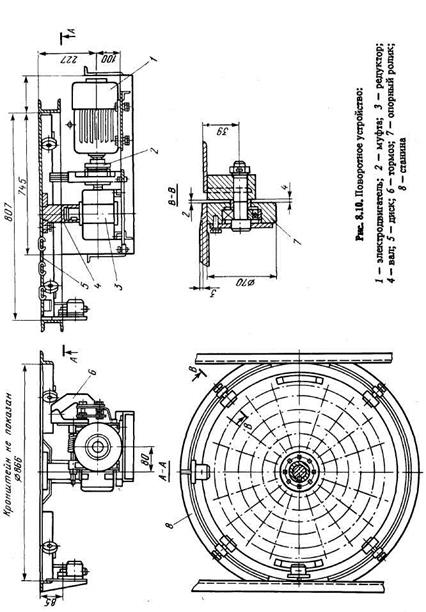
На рис. 8.10 изображено поворотное устройство, предназначенное для поворота укладываемого в пакет груза (мешка, ящика и т. п.) на угол 90о в горизонтальной плоскости, которое представляет собой диск 5, опирающийся по контуру на опорные ролики 7, закрепленные на неподвижной станине 8. Поворот диска осуществляется от электродвигателя 1 через червячный редуктор 3, соединяемый с валом электродвигателя посредством муфты 2, совмещенной с тормозным шкивом. Выходной конец вала редуктора соединен с поворотным диском 5 посредством специального полого вала 4, жестко закрепленного на диске. Точность остановки поворотного устройства в необходимом положении обеспечивается тормозом 6.
Перемещение штабелируемых грузов в прямолинейном направлении при формировании слоя осуществляется различного рода толкателями и сталкивающими устройствами.
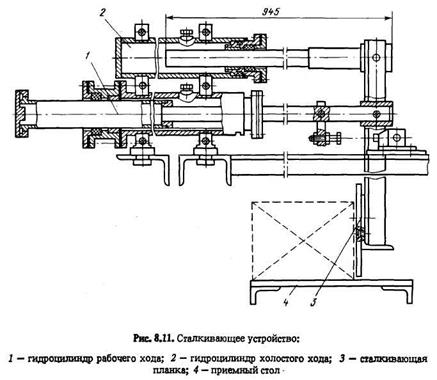
Сталкивающее устройство (рис. 8.11) состоит из приемного стола 4 и сталкивателя. Служит для накопления рядов и последовательногр перемещения их на тележку в процессе образования слоя.
Сталкиватель состоит из сдвоенных плунжерных гидроцилиндров 1 и 2 одностороннего действия, соединенных друг с другом стал кивающей планкой 3, осуществляющей возвратно-поступательное движение. Рабочий ход обеспечивается гидроцилиндром 1, холостой -гидроцилиндром 2.
Одним из основных узлов ПФМ и укладочных автоматов является подъемно-опускное устройство, которое может быть выполнено в различном конструктивном исполнении.
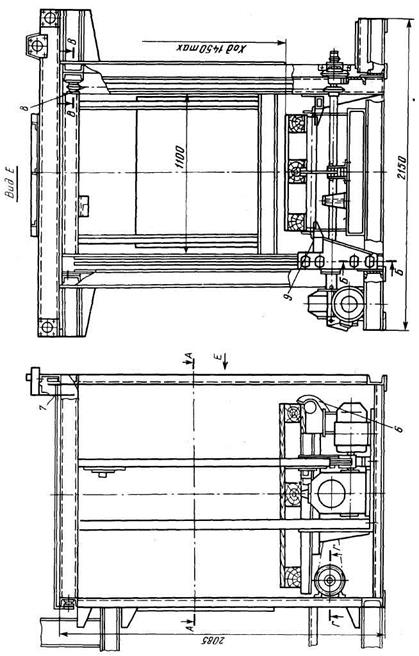
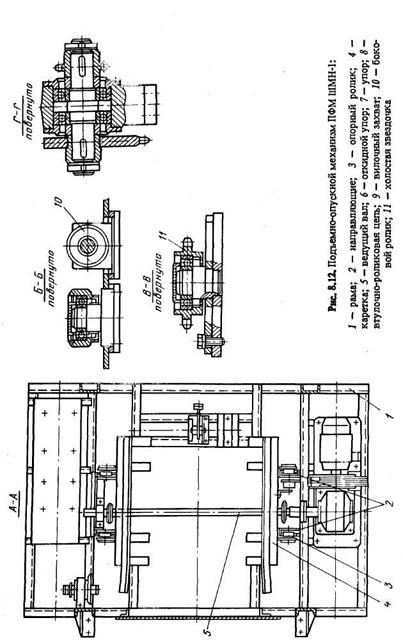
На рис. 8.12 показан подъемно-опускной механизм пакетоформирующей машины ШМН-1, выполненный в механическом варианте. Узлы подъемно-опускного механизма смонтированы на раме 1. В вертикальных направляющих 2 на опорных 3 и боковых 10 роликах перемещаются две каретки 4 с вилочными захватами 9. Каретки подвешены к двум втулочно-роликовым цепям 8, огибающим ведущие звездочки вала 5 и холостые звездочки 11. Привод механизма осуществляется от электродвигателя через червячный редуктор, выходной вал которого соединен зубчатой муфтой с ведущим валом 5. Положение поддона на захватах кареток фиксируется направляющими уголками и специаль-
ным откидным упором 6. На верхней части рамы установлен упор 7, служащий для уплотнения верхнего слоя пакетируемых мешков. На раме установлен также регулятор высоты пакета.
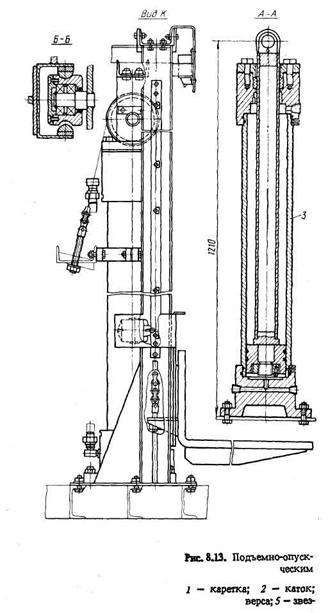
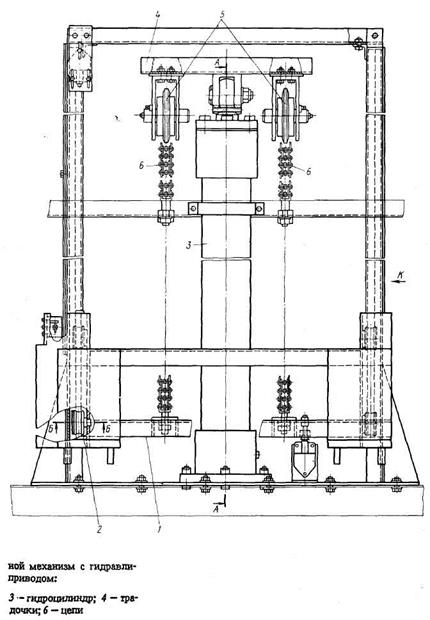
На рис. 8.13 изображен подъемно-опускной механизм с гидравлическим приводом. Он служит для приема порожнего поддона или ТО, подачи его в крайнее верхнее положение, шагового перемещения пакета вниз по мере укладки в него слоев груза и установки готового пакета на выводящий конвейер. Каретка 1 гидроподъемника на четырех катках 2 перемещается по двум вертикальным направляющим. Привод осуществляется от гидроцилиндра 3, на штоке которого укреплена траверса 4 с двумя звездочками 5. Звездочки огибаются цепями 6, один конец которых прикреплен к неподвижной раме, другой - к грузоподъемной каретке 1.
Сформированные пакеты и заполненные ящики, гофрокороба или тара-оборудование выводятся из ПФМ или укладочных автоматов с помощью обычных цепных и пластинчатых конвейеров или приводных рольгангов, имеющих обычное конструктивное исполнение. Установка грузов на выводные конвейеры осуществляется подъемно-опускным устройством в нижнем его положении.
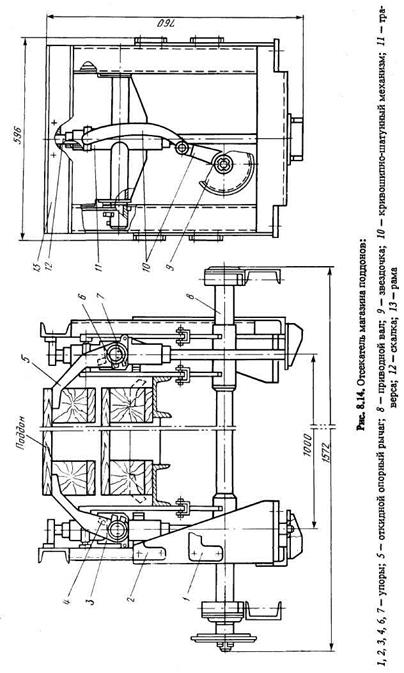
Для обеспечения ритмичной и непрерывной работы ПФМ обычно снабжаются магазином порожних поддонов, который представляет собой шахту, вмещающую одну или несколько стопок поддонов, устанавливаемых на специальные упоры. При выводе из машины сформированного пакета из магазина поддонов на грузозахватное устройство подъемно-опускного механизма автоматически обеспечивается подача порожнего поддона. При этом происходит отсечка поддона, находящегося снизу, помещенной в магазин стопки с помощью специального отсекателя. Одна из конструкций таких отсе-кателей показана на рис. 8.14.
Отсекатель смонтирован на раме магазина поддонов и состоит из двух стоек. Каждая стойка представляет собой раму 13 с жестко закрепленной скалкой 12. По скалке перемещается траверса 11 с откидными рычагами 5. Привод траверсы состоит из кривошипно-шатунного механизма 10, приводного вала 8 и звездочки 9, которая получает вращение от ведущего вала подъемно-опускного механизма. На каждой раме установлены неподвижные упоры 1 и 2. Поворот рычагов 5 ограничивается упором 3 траверсы и упором 4 рычага. На ступице рычага приварены упоры 7 и б.
При повороте приводного вала вся стопка поддонов опускается вниз до установки на конвейер. При этом рычаги 5 выходят из-под поддона и при дальнейшем вращении вала вводятся под второй снизу поддон и приподнимают всю стопку, оставляя нижний поддон на подающем конвейере.
КРАНЫ-ШТАБЕЛЕРЫ
Краны-штабелеры являются основным средством механизации работ на складах тарно-штучных грузов. Краны-штабелеры по конструкции разделяют на мостовые и стеллажные. Мостовые краны-штабелеры бывают в подвесном и опорном исполнении.
Применение кранов-штабелеров в складах при обслуживании напольными погрузчиками позволяет сократить ширину проходов с 2,5...3 м для мостовых кранов-штабелеров, управляемых с пола, до 1,5 м, для мостовых кранов-штабелеров, управляемых из кабины, -до 2,0 м. Для стеллажных кранов-штабелеров ширину проходов обычно принимают 1,0...1,3 м. Это позволяет увеличить полезную площадь складов.
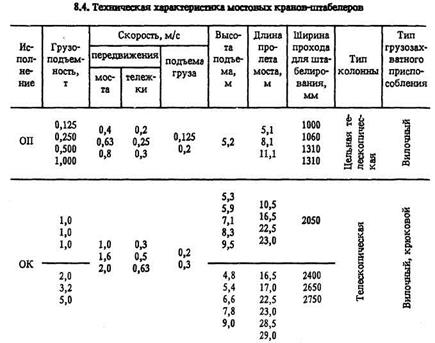
Грузоподъемность кранов-штабелеров, выпускаемых нашей промышленностью, - 0,125-12,5 т при длине пролета до 30 м. При высоте складов до 6,0 м обычно используют мостовые краны-штабелеры, управляемые с пола (ОП); при высоте до 9,0 м можно использовать краны, управляемые из кабины (ОК); при больших высотах складов рекомендуется использовать стеллажные краны-штабелеры.
Предельные значения ускорений и замедлений в периоды неустановившихся процессов движения для механизмов подъема кранов-штабелеров принимают не более 0,5 м/с2, а для механизмов передвижения крана при высоте подъема до 6 м - не более 0,8 м/с2; при большей высоте подъема не более 0,4 м/с2.
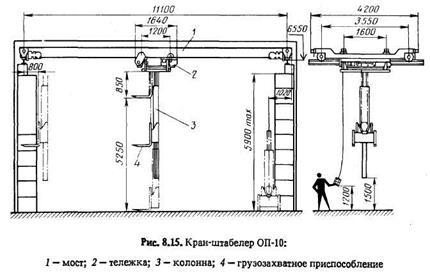
Основным узлом мостового крана-штабелера является мост, состоящий из двух главных балок, по которым перемещается тележка с установленными на ней поворотным кругом с платформой, колонной и электрической лебедкой (механизмом подъема). Колонна, представляющая собой две вертикальные направляющие, предназначена для установки на ней и обеспечения вертикального перемещения грузоподъемной каретки с грузозахватным приспособлением.
Мост крана-штабелера по конструкции не отличается от моста обычного мостового крана. Главные балки его выполнены из двутавровых профилей или сварными - коробчатого сечения.
Тележки кранои-штабелеров, как и краны, по способу установки на мосту бывают подвесными (на штабелерах грузоподъемностью до 1,0 т) и опорными.
Для кранов-штабелеров и тележек в подвесном исполнении используют механизмы передвижения от электрических талей. Механизмы передвижения, как правило, имеют двухскоростной привод. В соответствии с ГОСТ 16553 мостовые краны-штабелеры по конструктивному исполнению делятся на три типа: мостовой опорный, управляемый с пола (ОП); мостовой опорный, управляемый из кабины (ОК); мостовой опорный, управляемый из кабины для длинномерных грузов (ОКД).
В отдельных случаях целесообразно применять краны-штабелеры с телескопической колонной, например при работе на участке погрузки автотранспорта или в зоне комплектации. 325
Техническая характеристика мостовых кранов-штабелеров, применяемых на складах современных предприятий, приведена в табл. 8.4.
На рис. 8.15 показан кран-штабелер ОП-1,0.
Если мосты мостовых кранов-штабелеров, как было сказано выше, практически не отличаются от мостов обыкновенных мостовых кранов, то тележки имеют существенные отличия. Это обусловлено прежде всего наличием поворотной платформы, на которой установлен механизм подъема. Механизм поворота может быть установлен как на поворотной платформе, так и на раме, т. е. неподвижной части тележки. Одним из основных требований, предъявляемых к конструкции тележек кранов-штабелеров, является минимальная высота, так как она в значительной степени определяет общую конструктивную высоту крана. По типу поворотного устройства тележки бывают двух конструктивных типов: оборудованные опорно-поворотными кругами и с вращением колонны на подшипниках.
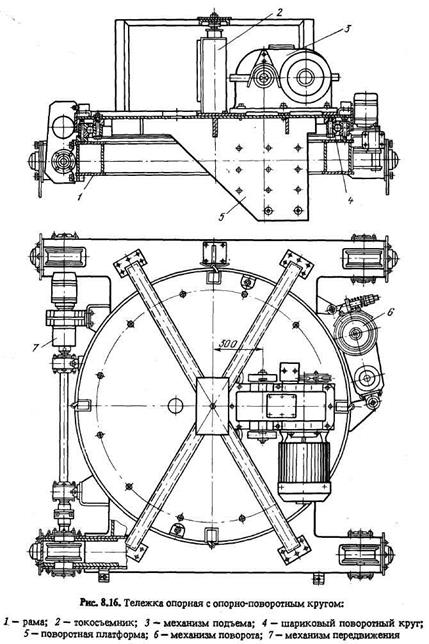
На рис. 8.16 показана тележка с опорно-поворотным кругом. Для крепления колонны к нижней части вращающейся платформы приварены специальные косынки. Механизм поворота 6 в данном случае состоит из электродвигателя, тормоза, трехступенчатого редуктора и
приводного обрезиненного колеса. Он установлен на шарнире и с помощью пружины обрезиненное колесо прижимается к ободу вращающейся платформы.
Тележка передвигается по рельсам, уложенным на балки моста, с помощью специального механизма 7.
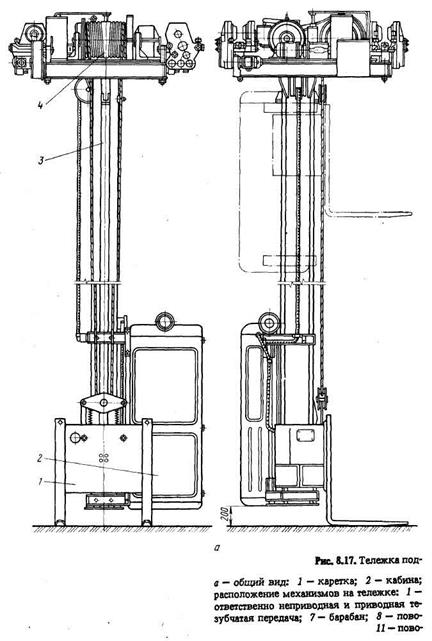
На рис. 8.17 показана тележка крана-штабелера грузоподъемностью 1 т подвесного типа. На тележке (рис. 8.17, с) укреплена колонна 3 в комплексе с кареткой 1 и кабиной 2.
Подъем грузоприемной каретки осуществляется с помощью двух ветвей одного каната, огибающего уравнительный блок, установленный на каретке. Канатный барабан механизма подъема 4 имеет две нарезки для наматывания каната.
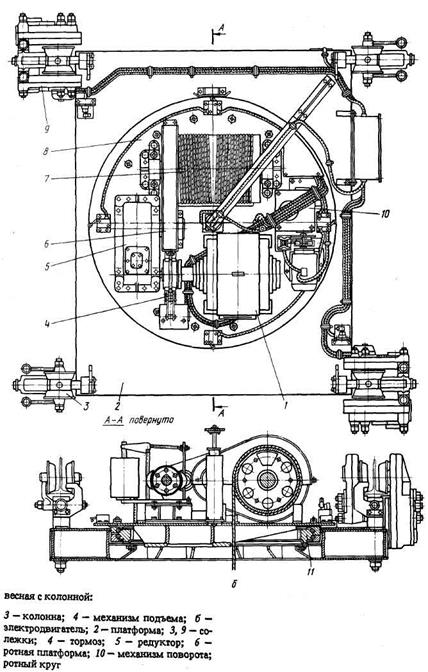
Тележка (рис. 8.17, б) представляет собой плоскую четырехугольную сварную платформу 2 с круглым проемом в центре, оборудованную кольцевым кронштейном для крепления опорно-поворотного круга. По углам рамы тележки крепятся две неприводных 3 и две приводных 9 монорельсовых тележки.
Поворотный круг 11 с внутренним зубчатым венцом несет на себе поворотную платформу 8, на которой установлен механизм подъема, состоящий из электродвигателя 1, тормоза 4, редуктора 5, открытой зубчатой передачи 6 и барабана 7.
На поворотной платформе установлен механизм поворота 10, состоящий из электродвигателя, колодочного тормоза специальной конструкции и червячного редуктора, на выходном конце тихоходного вертикального вала которого установлена шестерня, входящая в зацепление с зубчатым венцом опорно-поворотного круга. В центре поворотной платформы установлен кольцевой токосъемник.
Принципиальная схема телескопической колонны мостового крана-штабелера с запасовкой канатов показана на рис. 8.18.
Работа механизма подъема в совокупности с телескопической колонной осуществляется следующим образом. При наматывании каната 6 на барабан механизма подъема 7 каретка 1 с грузом и закрепленными на ней блоками 8 и 9 поднимается вверх. При этом посредством каната 4, закрепленного на неподвижной секции 5 колонны и огибающего блок 9 на каретке, и блока 2 на подвижной секции 3 колонны, перемещается вверх и подвижная секция. Причем скорость передвижения подвижной секции в два раза меньше скорости перемещения каретки.
Расчет кранов-штабелеров мостового типа аналогичен расчету обычных мостовых кранов с учетом некоторых особенностей.
Так, при расчете механизма подъема кроме массы поднимаемого груза GГ необходимо учитывать массу каретки Скар и массу подвижной секции колонны Gкол.
Максимальное натяжение каната при подъеме груза

где ап— число полиспастов механизма подъема; для кранов-штабелеров обычно ап=2; ηбл -КПД блока; принимают nбл=0,97...0,99; тп— кратность полиспаста.
При расчетах величину GГ обычно задают, величины же Gкap и Gкол следует задавать в зависимости от величины GГ. Ориентировочно Gкap=(O,O5...O,1)GГ;

Определив 5mах, рассчитывают разрушающую нагрузку

По Sразр выбирают канат, выписывают его марку и диаметр dк, после чего определяют размеры канатного барабана

Для кранов-штабелеров обычно применяют лебедки, имеющие канатные барабаны с двойной (правой и левой) нарезкой. Длина таких барабанов (м)

где H — высота подъема груза, м; tK — шаг канавок нарезки барабана, tK = dK + (2...3) мм; l1 — промежуток в середине барабана между нарезками правого и левого направлений. Значение l1 принимается исходя из конструктивных соображений.

Статическая мощность электродвигателя (кВт)

где vк—скорость наматывания каната, м/с:
vк = vгmп,
здесь ηо общий КПД привода; можно принять η0 = 0,75...0,8.
По потребной статической мощности выбирают электродвигатель и рассчитывают для выбранного электродвигателя время разгона (с)

где Тпк -пусковой момент выбранного по каталогу электродвигателя, Н • м; Тс — статический момент на валу электродвигателя, необходимый для преодоления грузового момента на барабане, Н * м:
δ— коэффициент приведения маховых моментов вращающихся масс привода к валу электродвигателя; δ = 1,1...1,15; (GD 2)э — маховый момент ротора электродвигателя, кг*м2.
Рассчитанная таким образом величина t'p дает возможность определить среднее ускорение при пуске и сравнить его с допускаемым:
Максимальное время разгона не должно превышать 3...5 с. Если а > [а], то необходимо заменить электродвигатель на меньший по мощности.
Величину передаточного числа и определяют, исходя из соотношения

где nб — частота вращения барабана, об/мин:

По передаточному числу и и потребной мощности привода с учетом режима работы выбирают редуктор.
Выбор тормоза для механизма подъема осуществляют по тормозному моменту

где КT — коэффициент запаса торможения, который по правилам Госгортехнадзора принимается для легкого режима -1,5; среднего - 1,75; тяжелого — 2,0; весьма тяжелого — 2,5; Тт.с— статический тормозной момент, Н * м:
Для выбранного по тормозному моменту тормоза рассчитывают время торможения (с)

где Tтк -тормозной момент, создаваемый выбранным тормозом, значения которого берут из каталогов, Н * м.
По действительному времени торможения tТ определяют среднее значение ускорения в период торможения и сравнивают его с допускаемым. Если действительные ускорения превышают допускаемые, тормоза регулируют на снижение создаваемого тормозного момента.
Расчет механизма поворота сводится к определению момента сопротивления вращению поворотной части крана Тв.т , который обусловлен моментом сил трения WТ , приложенным к телам качения относительно оси вращения. Для кранов с поворотным кругом

где DK — диаметр поворотного круга или кругового рельса, размер которого определяется конструктивно, так как на поворотной площадке поворотного круга необходимо разместить механизм подъема, а иногда и механизм поворота, м;

здесь GП.К — масса поворотной части крана; в предварительных расчетах можно принять Gп.к = (2...3)GГ, кг; w' — коэффициент сопротивления в элементах, обеспечивающих поворот (катки, шаровые опоры и т. д.); при использовании шариковых или роликовых поворотных кругов w' = 0,015—0,02; катков на осях, перемещающихся по круговому рельсу:

где к — коэффициент трения качения катка по рельсу; к = 0,5...0,6 мм; f — коэффициент трения скольжения в цапфах катков; для подшипников скольжения f = 0,08...0,1, для подшипников качения f = 0,015...0,02; kр — коэффициент, учитывающий трение реборд, кp = 2,0...2,5; Dx.к — диаметр ходовых опорных катков, как правило, принимают Dх.к = 80...150мм; d — диаметр цапф катков, мм; значение d определяют, исходя из принятого значения Dх.к и соотношения Dх.к /d = 4...б.
Зная величину момента сопротивления повороту Tв.т (Н * м), можно определить потребную мощность электродвигателя для привода механизма

где nк— частота вращения колонны крана; обычно принимают nк= 2...5 об/мин; ηП — КПД привода, для механизмов поворота ηп= 0,5...0,7.
Из каталога по потребной мощности выбирают электродвигатель и определяют общее передаточное число привода
uобщ= nэ/ nк
В механизмах поворота мостовых кранов-штабелеров привод, как правило, представляет собой сочетание редуктора и открытой передачи. Причем передаточное число открытой передачи, связывающей кинематически выходной вал редуктора с поворотным кругом, обычно находится в интервале 6...15, что позволяет обеспечить большое общее передаточное число привода.
Частоту вращения колонны мостовых кранов-штабелеров пК , управляемых из кабины, принимают не выше 4 об/мин, а управляемых с пола - не выше 2,5 об/мин.
Выбранный по статической мощности электродвигатель обычно проверяют по пусковому моменту

где (GD2)э — маховый момент выбранного электродвигателя, кг *м2; пэ — частота вращения вала электродвигателя, об/мин; LГ — расстояние от центра вращения до центра тяжести груза, м; (ΣGD2) — суммарный маховый момент поворотной части крана (каретки и колонны с поворотным кругом), кг • м2; tp — время разгона, с.
Для механизма поворота время разгона tp и торможения tТ

где β - рекомендуемый угол поворота груза за время разгона (торможения); для кранов-штабелеров β =π/9.
Соотношение Тп /Тн не должно превышать паспортного значения для выбранного двигателя. В данном случае Тн = 9550Рэл/nэл (Н • м) -номинальный момент электродвигателя.
Тормоз для механизма поворота выбирают по тормозному моменту (Н*м)

Механизмы передвижения кранов-штабелеров как мостовых, так и стеллажных по конструкции аналогичны механизмам передвижения обычных мостовых кранов.
Для расчета механизма передвижения задаются скоростью передвижения (см. табл. 8.4) крана или тележки, ориентировочно определяют массу перемещаемого агрегата (крана или тележки) Gn.a, массу груза, длину пролета, а также режим работы. Особенностью расчета кранов-штабелеров является то, что они предназначены для работы внутри складов и ветровой нагрузке не подвергаются.
В начале расчета в зависимости от нагрузки N выбирают тип и диаметр ходовых колес Dх.к.
Для крана
где CK ,GT ,GГ — масса соответственно крана, тележки и груза, кг; LK — пролег крана, м; l — нерабочая часть пролета крана, м.
Для тележки можно принять равномерное распределение нагрузки на колеса, т. е.
Сопротивление передвижению тележки или крана

где w' — коэффициент сопротивления передвижению:

где к — коэффициент трения качения колес по рельсам, η = 0,5...0,б мм; k — коэффициент трения в цапфах, f = 0,08...0,1 для подшипников скольжения и f = 0,015...0,02 для подшипников качения; kp — коэффициент, учитывающий трение реборд о направляющие рельсы, для тележек кр = 2,0..2,5, для кранов kp = 1,2...1,5; в расчетах можно принять для тележек DX.K /d = 4...6, для кранов DX.K /d = 6...8; Gn.a — масса перемещаемого агрегата.
При известной скорости передвижения vп потребная статическая мощность электродвигателя ( кВт)

где η- КПД передаточного механизма; η = 0,8...0,9.
Для выбранного по потребной мощности электродвигателя рассчитывают время разгона (с)

где T'п — пусковой момент выбранного электродвигателя, Н • м; Tс — статический момент сопротивления, приведенный к валу электродвигателя, Н * м:

здесь и = пэ /пхк ; nх.к = 60vп /пDх.к; (GD2)Э - маховый момент выбранного электродвигателя, кг • м2.
Зная величину tр, рассчитывают действительное ускорение а = v / tр и сравнивают его с допускаемым (amax), рассчитанным с учетом того, что буксование в момент начала движения (при пуске электродвигателя) отсутствует:


где nпр — число приводных колес; т — общее число колес.
Если а > [аmах], то необходимо взять меньший по мощности электродвигатель.
Динамические нагрузки, возникающие в период торможения механизма передвижения, обусловлены необходимостью поглощения кинетической энергии механизма, причем статический момент Tс.т, создаваемый сопротивлением трения WT ходовой части тележки (или крана), помогает торможению, а сопротивление от уклона Wy препятствует ему. Исходя из этого, тормозной момент (Н • м)

где tT — время торможения, с.
Минимальная его величина определяется исходя из максимально допустимого ускорения, рассчитываемого при условии отсутствия юза при торможении:

где n3 — число затормаживаемых колес; т — общее число колес; kcц — коэффициент сцепления колес с рельсами; принимают ксц = 0,15; <φсц — коэффициент запаса сцепления, при работе без ветровой нагрузки φсц = 1,2.
максимальное время торможения не должно превышать 3...5 с. По величине тормозного момента Тт выбирают тормоз.
Стеллажные краны-штабелеры в отличие от мостовых перемещаются только по одному межстеллажному проходу. Для того чтобы
обеспечить обслуживание нескольких проходов между стеллажами одним краном-штабелером, необходимо иметь дополнительные транс-бордерные устройства для перемещения крана-штабелера из одного прохода в другой.
Современный стеллажный кран-штабелер выполнен виде нижней ходовой балки, оборудованной двумя опорными колесами, к которой крепят одну или две колонны, имеющие сверху горизонтально расположенные направляющие ролики. При установке двух колонн верхние их концы соединяют горизонтальной балкой. Колонна служит направляющей для перемещения грузоприемной каретки, несущей телескопический захват и кабину.
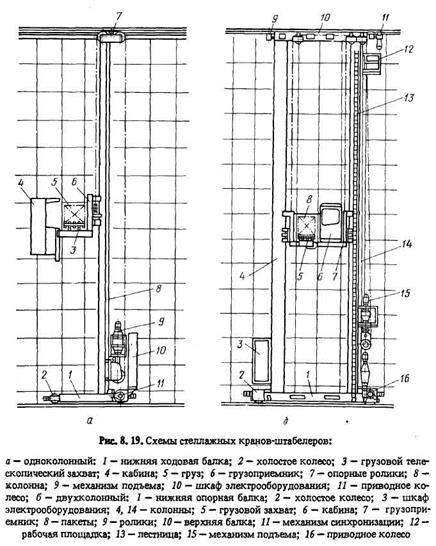
На рис. 8.19, а показан одноколонный стеллажный кран-штабелер. Нижняя балка 1 опирается на приводное 11 и холостое 2 колеса, к балке прикреплена колонна 8, на верхней части которой установлены опорные горизонтальные ролики 7.
По колонне с помощью механизм4 подъема 9 и канатной тяги перемещается грузоприемник 6 с грузовым телескопическим захватом 3 для груза 5 и кабиной 4. Кран снабжен шкафом электрооборудования 10.
Двухколонные стеллажные краны-штабелеры (рис. 8.19, б) применяют при больших высотах складов и значительной грузоподъемности. Кран-штабелер имеет нижнюю опорную балку 1, которая опирается на приводное 16 и холостое 2 колеса. К опорной балке крепятся две колонны 4 и 14, верхние концы которых соединены продольной верхней балкой 10. На последней установлены две пары горизонталь-, ных опорных роликов 9 и механизм синхронизации 11. Между колоннами с помощью механизма подъема 15 перемещается грузоприемник 7, на котором установлены выдвижные телескопические захваты 5, служащие для установки пакетов 8 в ячейки стеллажей, и кабина 6. Для регулирования верхних роликов и механизма синхронизации 11 предусмотрена рабочая площадка 12, вход на которую возможен по лестнице 13. На одной из колонн крепится шкаф электрооборудования 3. Конструкция механизмов подъема и передвижения стеллажных кранов-штабелеров практически ничем не отличается от аналогичных механизмов других грузоподъемных машин. Методики их расчета также идентичны.
Для стеллажных кранов-штабелеров применяют выдвижные вилочные или телескопические грузовые захваты. Вилочные захваты укреплены на выдвижной каретке, передвигающейся по направляющей траверсе. Последняя может поворачиваться на 180° в горизонтальной плоскости с целью обеспечения обслуживания двух стеллажей, расположенных по обе стороны межстеллажного прохода.
Телескопические захваты (рис. 8.20) обычно состоят из трех секций: неподвижной и двух подвижных - промежуточной и грузоне-сущей, которая служит опорной площадкой для установки груза. Грузонесущая секция при помощи опорных роликов перемещается по направляющим промежуточной секции, которая, в свою очередь, опирается роликами на направляющие неподвижной секции и передвигается по ним. Обе подвижные секции выдвигаются одновременно в одном направлении посредством привода примерно наполовину своей длины. Причем скорость выдвижения грузовой секции в два раза больше скорости выдвижения промежуточной секции. Захват может выдвигаться в двух направлениях. Привод захватов в данном случае осуществляется от электродвигателя через редуктор к при водному валу захвата. При включении привода посредством шестерни приводного вала движение сообщается зубчатым рейкам, жестко закрепленным на промежуточной секции.
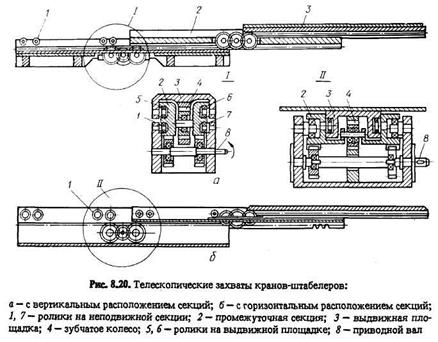
Движущаяся вместе с промежуточной секцией и закрепленная на ней шестерня входит в зацепление с неподвижной зубчатой рейкой и, получая при этом вращение, приводит в движение с удвоенной скоростью зубчатую рейку, жестко закрепленную на грузовой секции захвата.
Поступательное движение секциям захватов может сообщаться кроме указанного способа с помощью цепных и винтовых передач. Так, применяют захваты, в которых движение промежуточной секции передается реечным механизмом, а движение грузовой выдвижной секции осуществляется цепью, один конец которой закреплен неподвижно на неподвижной секции, другой же - на грузовой выдвижной секции.
На промежуточной секции укреплен подвижный блок, который огибает цепь. Такая конструкция позволяет выдвижной секции развить вдвое большую скорость перемещения по сравнению с промежуточной. Для обеспечения движения в обе стороны устанавливают две цепи: одну для привода вправо, другую - влево. Иногда вместо реечного привода промежуточной секции применяют винтовой.
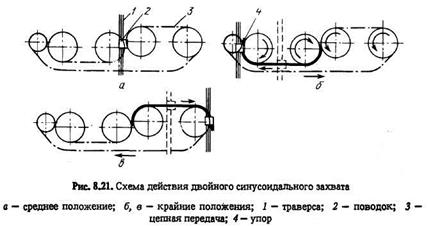
Заслуживает внимания конструкция двойного синусоидального захвата (рис. 8.21), применяемого фирмой "Demag" в новых стеллажных кранах-штабелерах.
Захват приводится в действие от электродвигателя через червячный редуктор. При этом с помощью приводной звездочки, получающей вращение от тихоходного вала редуктора, в движение приводится втулочно-роликовая цепь, замкнутая в горизонтальной плоскости. С помощью специального пальца, прикрепленного к цепи и входящего в зацепление со специальным поводком, подвижно посаженным на поперечную шлицевую траверсу, жестко прикрепленную к промежуточной секции, обеспечивается перемещение последней в ту или иную сторону. Причем в начале и конце хода скорость перемещения изменяется плавно, по синусоидальному закону. Это позволяет обеспечить большие скорости перемещения захвата, что способствует увеличению производительности.
Расчет захвата сводится к определению потребной мощности Рпотр для перемещения захвата с грузом в крайнем, наиболее неблагоприятном положении, а также следует произвести кинематический и прочностной расчет элементов и деталей захвата. Схема сил, действующих на элементы захвата в выдвинутом крайнем положении, показана на рис. 8.22.
Потребная мощность для перемещения груза захватом
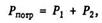
где Р1 — потребная мощность для перемещения грузовой секции, кВт (с грузом):

КПД привода в данном случае ввиду незначительных скоростей выдвижения и сложности передаточных механизмов следует принять равным 0,5...0,6.
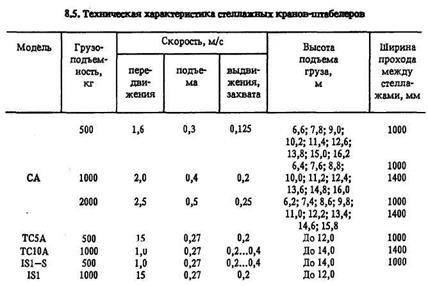
В соответствии с ГОСТ 16553 стеллажные краны-штабелеры по конструктивному исполнению разделяются на три типа: стеллажный автоматический опорный СА (складской робот), стеллажный автоматический для длинномерных грузов опорный САД; стеллажный комплектовочный опорный СК. Техническая характеристика стеллажных кранов-штабелеров приведена в табл. 8.5.
ЛИФТЫ
Лифт - это установка для подъема груза с грузонесущим устройством, которая выполнена в виде кабины или платформы, движущейся в жестких направляющих. Лифты широко применяются на складах для вертикального перемещения тарно-штучных грузов. Наибольшее распространение получили электрические лифты общего назначения грузоподъемностью 500...3200 кг, грузонесущим органом которых является кабина.
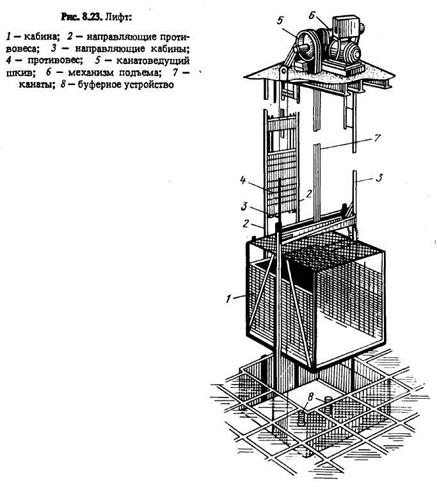
На рис. 8.23 представлена схема лифта, который состоит из кабины 1, подвешенной на канатах 7, огибающих канатоведущий шкив 5 механизма подъема 6 и противовеса 4, подвешенного к этим же канатам с противоположной стороны. Кабина перемещается вдоль направляющих 3, а противовес - вдоль направляющих 2. С целью снижения динамических нагрузок кабина в нижнем положении опускается на буферное устройство 8.
К подвешенным узлам лифтов относятся кабина лифта, противовес и канаты. Основным из подвешенных узлов является кабина, которая состоит из каркаса с ловителями и купе.
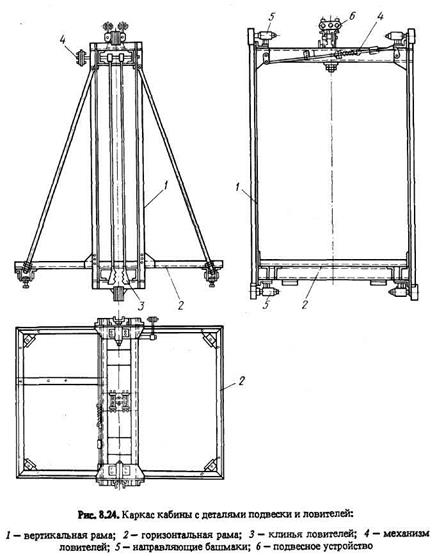
На рис. 8.24 представлен каркас кабины с деталями подвески и ловителями. Основная металлическая несущая часть каркаса выполнена в виде двух металлических рам: металлической вертикальной 1 и горизонтальной 2 рамы. Вертикальная рама состоит из нижней и верхней балочных конструкций, каждая из двух швеллеров. Верхняя и нижняя балочные конструкции соединены между собой на концах
двумя стояками с каждой стороны, образуя таким образом замкнутую вертикальную раму.
Горизонтальная рама 2 представляет собой опорную конструкцию, изготовленную из уголковой стали, в которую вставляется пол купе кабины. Рама опирается непосредственно на нижнюю балочную конструкцию вертикальной рамы и прикрепляется к ней. По концам нижней и верхней балочных конструкций закреплены направляющие башмаки 5 кабины, скользящие по направляющим.
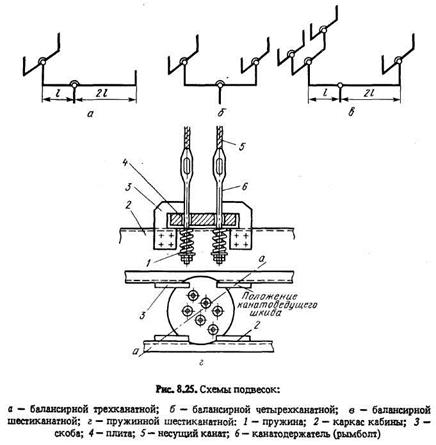
Между балками верхней балочной конструкции располагаются рычаги ловителей 4. От рычагов этого механизма к концам нижней балочной конструкции спускаются на стальных тягах клинья 3 ловителей. Каркас подвешивается на канатах за верхнюю балочную конструкцию с помощью подвесного устройства 6, прикрепляемого к середине верхней балочной конструкции каркаса. Подвешивание обычно производится с помощью специальных балансирных подвесок, схемы которых показаны на рис. 8.25, а-в.
На рис. 8.25, г показана пружинная шестиканатная подвеска, которая представляет собой устройство, в котором каждый канат крепится к подпружиненному рымболту, а нарезанная часть каждого болта пропускается через отверстие в опорной площадке каркаса
кабины или противовеса, проходит через спиральную пружину и за шайбой крепится гайкой и контргайкой.
Непременной составной частью лифтов являются ловители, которые располагаются на каркасе кабины. Они предназначены для удержания кабины (или противовеса) в направляющих при движении кабины вниз в случаях:
обрыва или ослабления одного или одновременно нескольких или всех канатов. В этом случае ловители приводятся в действие от механической связи несущих канатов с механизмом ловителей;
увеличения скорости движения кабины или противовеса выше предельной. В этом случае ловители приводятся в действие от ограничителя скорости.
Для уравновешивания массы кабины и части массы полезного груза с целью уменьшения мощности электродвигателя применяют противовесы, которые бывают прямого и полиспастного подвешивания.
Массу противовеса (кг) обычно принимают равной

Наиболее распространенный тип приводной станции грузового лифта с канатоведущим шкивом приведен на рис. 8.26.
Движущиеся элементы лифта, т. е. кабина и противовес вместе с направляющими, а также часть электрооборудования управления размещаются в специальном изолированном помещении, называемом шахтой.
Основными параметрами лифта являются: номинальная грузоподъемность G, скорость движения кабины v и высота подъема Н.
Номинальной грузоподъемностью лифта называется масса полезного груза, для перемещения которого он рассчитан. При этом масса кабины и жестко укрепленных на ней элементов не учитывается.
Транспортная способность лифта характеризуется производительностью лифта, которая определяется его основными параметрами. Для грузовых лифтов, применяемых для транспортных операций при производстве ПРТС-работ, производительность (т/ч):
