 |
Главная |


МЕТОД КАСАТЕЛЬНОЙ АППРОКСИМАЦИИ
|
из
5.00
|
Министерство образования и науки
Российской Федерации
Московский государственный университет тонких
Химических технологий им. М.В. Ломоносова
Кафедра
Автоматики, электроники и электротехники
Им. А.В. Нетушила
В.И. Божко, И.П. Титова
ЗАДАЧИ ПО ТЕОРИИ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Линеаризация уравнений движения нелинейной динамической системы
Учебное пособие
Москва 2014
ББК 32.965.9я73
УДК 62-50:66.012-52+681.513.5(075.8)
Рецензент: д.т.н., профессор А.С. Таран
Б-76 В.И. Божко, И.П. Титова
Задачи по теории автоматического управления.
Часть 1. Линеаризация уравнений движения нелинейной динамической системы
Учебное пособие.
М., МИТХТ им. М.В. Ломоносова, 2014 – 40 с.: ил.
Пособие разработано на основании рекомендаций государственных образовательных стандартов и утверждено библиотечно-издательской комиссией МИТХТ им. М.В. Ломоносова в качестве учебного пособия, поз. № 125/13.
Данное учебное пособие является дополнением к существующим учебникам по теории автоматического управления и автоматизации технологических процессов, и отражает читаемый курс лекций для студентов очной формы обучения по дисциплине «Системы управления технологическими процессами». В нем рассматриваются теоретические основы и примеры решения задач, предлагаемые на семинарских занятиях дисциплины.
Настоящее пособие может быть использовано студентами при подготовке к рубежным контрольным мероприятиям и к экзамену по данному курсу.
© МИТХТ им. М.В. Ломоносова, 2014
СОДЕРЖАНИЕ
стр.
| 1. | Линеаризация вблизи рабочей точки. Метод касательной аппроксимации ……………………………. | |
| 2. | Примеры решения задач …………………………… | |
| 3. | Задачи ……………………………………………….. | |
| Литература ………………………………………….. |
ЛИНЕАРИЗАЦИЯ ВБЛИЗИ РАБОЧЕЙ ТОЧКИ
МЕТОД КАСАТЕЛЬНОЙ АППРОКСИМАЦИИ
Математические модели химико-технологических процессов и систем (ХТП и ХТС) с сосредоточенными параметрами, полученные на основе физической природы моделируемого процесса, обычно являются нелинейными динамическими моделями, общая форма записи которых в физических переменных «вход-выход» имеет вид
 (1.1)
(1.1)
где  – l-мерный вектор выходных переменных процесса;
– l-мерный вектор выходных переменных процесса;  – m-мерный вектор управляющих воздействий;
– m-мерный вектор управляющих воздействий;  – k-мерный вектор возмущающих воздействий;
– k-мерный вектор возмущающих воздействий;  – векторные функции, описывающие взаимосвязь выходных и входных параметров процесса;
– векторные функции, описывающие взаимосвязь выходных и входных параметров процесса;  – символическое обозначение производной – алгебраизированный оператор дифференцирования; t – время. При этом предполагается существование соответствующих производных от y(t), u(t), r(t) по t и kL>kG, kL>kN, где через kL, kG, kN обозначены порядки старших производных от р в соответствующих функциях
– символическое обозначение производной – алгебраизированный оператор дифференцирования; t – время. При этом предполагается существование соответствующих производных от y(t), u(t), r(t) по t и kL>kG, kL>kN, где через kL, kG, kN обозначены порядки старших производных от р в соответствующих функциях  .
.
Далее будут рассматриваться детерминированные системы, т. е. системы в которых определенным значениям выходных переменных соответствуют определенные значения входных переменных. В этом случае векторы управляющих  и возмущающих
и возмущающих  воздействий являются также детерминированными.
воздействий являются также детерминированными.
Методы изучения нелинейных систем достаточно сложны и трудоемки, так как нет общей теории нелинейных систем и каждое исследование нелинейной системы требует специальных подходов. Решить аналитически нелинейные уравнения выше первого порядка довольно трудно. В связи с этим и достаточно малыми отклонениям от заданного режима, обычно стационарного, проводится переход от нелинейных моделей к линейным путем их линеаризации.
К линейным моделям систем применим принцип суперпозиции, который неприменим к нелинейным системам. Все это обуславливает переход к линеаризованным системам.
Простейшим методом изучения нелинейных систем (1.1) является линеаризация, суть которой состоит в замене нелинейной системы эквивалентной линейной системой в заданной рабочей точке функционирования и её окрестности с точностью до первого порядка малости по аргументам векторных функций [1]. При этом предполагается, что в исследуемом динамическом процессе переменные  изменяются так, что их отклонения
изменяются так, что их отклонения  от значений в точке линеаризации
от значений в точке линеаризации  остаются все время достаточно малыми.
остаются все время достаточно малыми.
Представленный ниже метод линеаризации нелинейных динамических систем был разработан и доказан в начале двадцатого века математиком и механиком академиком Петербургской академии наук А.М. Ляпуновым. С математической стороны этот вопрос сводится к исследованию решений систем обыкновенных дифференциальных уравнений. До работ Ляпунова при исследовании устойчивости систем проводилась линеаризация математических моделей путем отбрасывания всех нелинейных членов уравнений без анализа последствий такой линеаризации. Тогда как переход к исследованию линеаризованной модели со значительно отличными от исходной параметрами модели может привести к потере робастности системы, т.е. снижению запаса устойчивости до значения меньшего, чем заданный для исходной нелинейной системы. Работы Ляпунова содержат целый ряд фундаментальных результатов в теории обыкновенных дифференциальных уравнений как линейных, так и нелинейных.
Под изучением линейной или линеаризованной системы будем понимать:
1. Изучение динамических свойств и характеристик различных типов звеньев систем различной природы и конструкции.
2. Формирование функциональных и структурных схем систем автоматического управления (САУ).
3. Построение динамических характеристик исследуемой системы.
4. Определение ошибок и показателей точности замкнутых систем.
5. Исследование устойчивости замкнутых систем.
6. Оценки качественных показателей процессов управления.
7. Определение чувствительности систем к изменению её внешних и внутренних параметров.
8. Изучение различных видов корректирующих устройств, вводимых в системы для повышения точности и улучшения динамических качеств.
9. Создание частотных, корневых и других методов синтеза корректирующих устройств и различных методов оптимизации систем по показателям качества.
10. Разработку методов анализа и синтеза сложных многомерных и комбинированных САУ.
Динамика функционирования системы в рабочей точке в соответствии с (1.1) имеет вид
 (1.2)
(1.2)
где  ,
,  ,
,  – значения выходов, управлений, возмущений и их производных в рабочей точке соответственно. Если рабочая точка соответствует установившемуся режиму ХТП, то все производные по t равны нулю.
– значения выходов, управлений, возмущений и их производных в рабочей точке соответственно. Если рабочая точка соответствует установившемуся режиму ХТП, то все производные по t равны нулю.
Для упрощения записи введем обозначения:
 и
и
 . (1.3)
. (1.3)
Тогда уравнение (1.2) запишется в виде  .
.
В случае, когда функции  являются аналитическими (т. е. непрерывными и бесконечно дифференцируемыми) в рабочей точке или её окрестности, то они могут быть разложены в ряд Тейлора по степеням малых отклонений переменных
являются аналитическими (т. е. непрерывными и бесконечно дифференцируемыми) в рабочей точке или её окрестности, то они могут быть разложены в ряд Тейлора по степеням малых отклонений переменных 



 , (1.4)
, (1.4)


 ,
,  ,
,
(1.5)
где
 ,
,  ,
,  ;
;  ,
,  ,
,  - отклонения выходных
- отклонения выходных  и входных
и входных  ,
,  величин от их значений
величин от их значений  ,
,  ,
,  в рабочей точке. Если рабочей точкой является стационарный режим, то величины , , соответствуют некоторым постоянным значениям
в рабочей точке. Если рабочей точкой является стационарный режим, то величины , , соответствуют некоторым постоянным значениям  ,
,  ,
,  , что и будет предполагаться в дальнейшем;
, что и будет предполагаться в дальнейшем;
Fi, Фi - i-е компоненты векторных функций соответственно; частные производные, обозначенные верхним индексом 0, берутся в рабочей точке.
Следовательно, для уравнения (1.1) получаем
 . ,
. ,
(1.6)
Из выражения (1.6) вычитаем выражение (1.2) и отбрасываем члены ряда выше первого порядка малости  ,
, 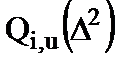 ,
,  , получаем:
, получаем:

 .
.
, (1.7)
Линеаризованные уравнения (1.7) в матричной форме имеют вид

 .
.
(1.8)
где выражения в скобках (...)0 представляют собой матрицы Якоби J или якобианы.
В общем случае матрица Якоби J для векторной функции  размерности
размерности  от аргумента z размерности
от аргумента z размерности  определяется следующим выражением [1]:
определяется следующим выражением [1]:
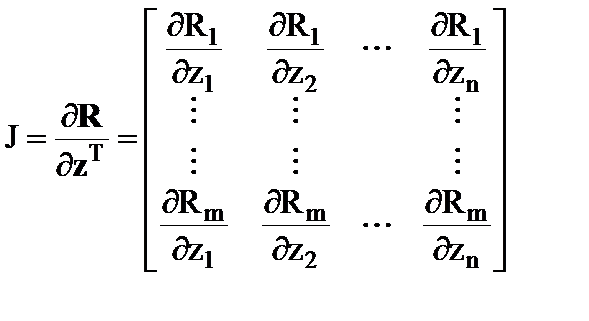 . (1.9)
. (1.9)
Элемент  представляет собой частную производную i-го уравнения по j-му аргументу (параметру). Соответственно i-я строка якобиана – частные производные i-го уравнения (i-я компонента векторной функции ) по всем переменным z.
представляет собой частную производную i-го уравнения по j-му аргументу (параметру). Соответственно i-я строка якобиана – частные производные i-го уравнения (i-я компонента векторной функции ) по всем переменным z.
Якобианы J в уравнении (1.8) являются матрицами с постоянными элементами, если рабочая точка характеризует установившийся режим ХТП и с переменными элементами, если рабочая точка характеризует неустановившийся режим ХТП.
Уравнения (1.8) записаны в отклонениях, однако они могут быть записаны и в относительных отклонениях. Далее под обозначениями  ,
,  и
и  будем понимать величины в отклонениях или в относительных отклонениях (применительно к конкретной задаче)- согласен.
будем понимать величины в отклонениях или в относительных отклонениях (применительно к конкретной задаче)- согласен.
Введем обозначения:
 ,
,  ,
,
 . (1.10)
. (1.10)
В результате математическая модель линеаризованной непрерывной многосвязной системы в физических переменных «вход-выход» может быть представлена векторным дифференциальным уравнением вида [2]:
 . (1.11)
. (1.11)
Если переменные ,  ,
,  и их производные по времени обозначить через новые переменные
и их производные по времени обозначить через новые переменные  , то геометрически линеаризация означает, что гиперповерхность (1.1) заменяется гиперплоскостью (1.11), касательной к данной гиперповерхности в рабочей точке. Поэтому линеаризацию вблизи рабочей точки называют также касательной аппроксимацией (разложением в ряд Тейлора). Для случая одной выходной переменной и одной входной переменной заданная кривая заменяется линией, касательной к данной кривой в рабочей точке.
, то геометрически линеаризация означает, что гиперповерхность (1.1) заменяется гиперплоскостью (1.11), касательной к данной гиперповерхности в рабочей точке. Поэтому линеаризацию вблизи рабочей точки называют также касательной аппроксимацией (разложением в ряд Тейлора). Для случая одной выходной переменной и одной входной переменной заданная кривая заменяется линией, касательной к данной кривой в рабочей точке.
Помимо касательной аппроксимации также существует аппроксимация по методу наименьших квадратов. При небольшой нелинейности оба метода приводят почти к одинаковым результатам. Второй метод применим при несколько больших отклонениях  выходных величин от рабочей точки
выходных величин от рабочей точки  , однако его значительно сложнее использовать по сравнению с первым методом.
, однако его значительно сложнее использовать по сравнению с первым методом.
В эту же группу методов линеаризации относятся алгебраическая линеаризация, линеаризация характеристических кривых и первый тестовый метод Ляпунова.
|
из
5.00
|
Обсуждение в статье: МЕТОД КАСАТЕЛЬНОЙ АППРОКСИМАЦИИ |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы