 |
Главная |


Часть 1. Расчет ПИД-реулятора по заданной LAX и параметрам
|
из
5.00
|
По вопросам к выполнению расчета и тренировки на tr_PID писать сюда: http://vk.com/airnave
График взят из тренажера tr_PID (в конце этого документа есть пояснения для тренировки расчета в tr_PID, для того, чтоб сверить правильность рассчитанных коэффициентов и написанной программы. Т.е для тренировки сначала выполняйте tr_PID, а потом этот расчет)




Ограничение подъема усиления дифференциальной составляющей h = 10
Перерегулирование = 5%
Исходя из заданной величины перерегулирования из таблицы выбираем ke
| Перерег., % | |||||
| ke | 0.35 | 0.4 | 0.5 | 0.6 | 0.75 |
ke = 0.5
Находим общий коэффициент усиления К0
Для этого на графике находим частоту среза wc. В нашем примере wc = 2. Все наклонные, которые расположились ниже wc, в расчетК0не берем!
К0 вычисляется как произведение отношений большей частоты к меньшей в степени модуля наклона меду ними (от wc и все, что выше, справа налево)
В нашем примере только одна частота выше wc, значит всего один множитель, значит К0 будет равно частоты среза и предыдущей частоты: 
где 2 – это wc, 0.5 – частота первого излома, 4 – это наклон между точками частот излома, между 0.5 и 2. Все остальные наклоны и частоты излома, которые находятся ниже wc = 2 (на графике ниже пунктирной линии уровня 100) откидываем и в расчет не берем.
Если бы wc была больше 8, допустим wc = 9. Выходит, что выше уровня частоты среза (линии 100) лежали бы уже 2 точки излома (0.5 и 8) с теми же наклонами. Значит формула расчета К0 имела бы вид:  Т.е. фактически мы бы двигались от wc и выше (справа налево), каждый раз деля большую частоту на меньшую в степени модуля наклона между ними.
Т.е. фактически мы бы двигались от wc и выше (справа налево), каждый раз деля большую частоту на меньшую в степени модуля наклона между ними.
Дальше расставляем частоты w1, w2… wn исходя из заданного графика:
w1, w2… wn расставляются строго по увеличению значения частот. Для данного графика w1=w2=w3=w4=0.5, т.к. обьект изменил свой наклон в частоте излома 0.5 с 0 до -4, т.е. изменение равно 4, значит в этой точке 4 частоты (w1,w2,w3,w4). wc исходя из графика осталась такой же =2. На частоте излома 8 наклон объекта изменился с -4 до -5, т.е. изменение рано 1, значит тут отмечачем одну частоту w5 = 8














Рассчитываем W(s) по формуле

Т.к. на частоте 0.5 наклон изменяется на 4, то w1=w2=w3=w4=0.5. Формула имеет вид:


Вычисляем суммарную некомпенсируемую инерционность Tsum:

Первая, самая маленькая частота (w1) в расчете Tsum никогда не учитывается!, вторая (w2) умножается на h , остальные (w4, w5 … wn) используются все как есть.

Теперь находим желаемую wcj частоту среза:

Находим коэффициент интегральный

Находим передаточная функция (zpk-форма) ПИД-регулятора. В расчете участвуют только частоты w1 и w2, все остальные(w3,w4…wn)всегда отбрасываются!


Так же запишем еще раз W(s), рассчитанную выше:

Составление программы:
Цветом обозначены значения, которые мы брали из формул, рассчитанных выше. Очень важно не перепутать большие и малые буквы, следить внимательно за обозначениями и синтаксисом: не путать и не терять точки, запятые, точки с запятыми и пробелы.
Программу лучше написать отдельно в новом документе MS Word или в txt файле, потом скопировать все целиком и ввести в рабочее окно matlab и нажать в конце, если понадобится клавишу Enter или запустить выполнение. Подключать рабочий каталог trenag не обязательно. На разных версиях matlab бывают разные глюки, иногда перед Step(W) нужно еще раз писать figure
В записи W1=tf([1],[2 1]) и в последующих W2 … Wn, так же как и Wp=zpk([-0.5 -0.5],[0 -5],0.009) в квадратных скобках между значениями стоят пробелы.
В записи Wp=zpk([-0.5 -0.5],[0 -5],0.009)коэфф. уже со знаком «-», т.е. всегда отрицательны!
В примере из-за того, что в формуле W(s) в знаменателе первый множитель (2S+1)^4, т.е. в степени 4, так как частоты W1=W2=W3=W4 равны между собой, поэтому в программе, для удобства, они одинаково записаны 4 раза. У вас эти множители могут быть различными и их количество может тоже отличатся.
Программа для нашего примера:
Прописываем путь к папке trenag
addpath c:\trenag
W1=tf([1],[2 1])
W2=tf([1],[2 1])
W3=tf([1],[2 1])
W4=tf([1],[2 1])
W5=tf([1],[0.125 1])
Ws=256*W1*W2*W3*W4*W5
Wp=zpk([-0.5 -0.5],[0 -5],0.009)
W=feedback(Wp*Ws,1)
figure; step(W)
figure; margin(Ws*Wp)
aLAX(Ws)
khar_sysz3(W)[DA1]
После ее выполнения появятся 3 графика[DA2] :


Пояснения к графикам:
 Горб над единичной пунктирной линией означает наше перерегулирование в 5% (при ke=0.5), которое мы задавали в исходных данных. При перерегулирование в 0% (ke=0.35) график плавно стремиться к единичному уровню (пунктирная линия). Чем выше перерегулирование, тем выше ke и выше горб. Снизу в Time(sec) указана длительность процесса. Вхождение – время до первого пересечения с единичным уровнем.
Горб над единичной пунктирной линией означает наше перерегулирование в 5% (при ke=0.5), которое мы задавали в исходных данных. При перерегулирование в 0% (ke=0.35) график плавно стремиться к единичному уровню (пунктирная линия). Чем выше перерегулирование, тем выше ke и выше горб. Снизу в Time(sec) указана длительность процесса. Вхождение – время до первого пересечения с единичным уровнем.

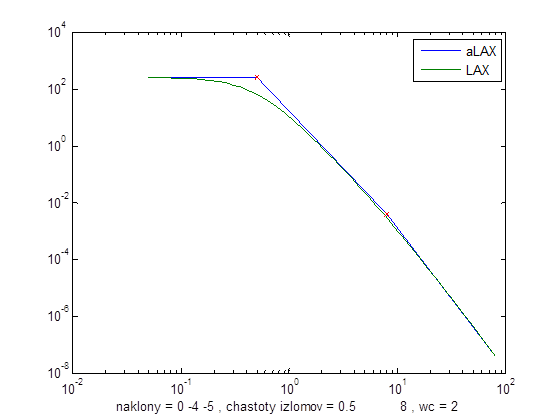
Восстановленная ЛАХ объекта из исходных данных[DA3]
Команда aLAX(Ws)

Наклоны 0 -4 -5, частоты изломов 0.5 , 8, частота среза 2 равны исходным данным.
Часть 2. tr_PID
|
из
5.00
|
Обсуждение в статье: Часть 1. Расчет ПИД-реулятора по заданной LAX и параметрам |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы