Достоинством структурной реализации является отсутствие избыточности элементов и функций, что обеспечивает простоту и достаточно высокую надежность схемы. Однако эта простота приводит одновременно к малой гибкости (способности к перестройке) системы управления.
В качестве логической схемы, реализующей полученные выше структурные формулы системы управления, можно использовать и микропроцессор. Микропроцессор оперирует с машинным словом в виде двоичного числа (кода) определенной разрядности. Значение двоичного разряда числа представляется при этом электрическим напряжением высокого (1) и низкого (0) уровня. Наиболее распространенные микропроцессоры имеют длину машинного слова в восемь бит (1 байт). Будем рассматривать входные сигналы системы управления X1, Х2, Х3, Х4, Х5 как некоторый двоичный код и припишем логические значения этих сигналов битам машинного слова (В- обозначение бита):
| Бит машинного слова
| В7
| В6
| В5
| В4
| В3
| В2
| В1
| В0
|
| Содержание бита
| 0
|
| 0
| Х5
| Х4
| Х3
| Х2
| Х1
|
Аналогично в виде двоичного кода можно представить и выходные сигналы системы управления:
| Бит машинного слова
| В7
| В6
| В5
| В4
| В3
| В2
| В1
| В0
|
| Содержание бита
| 0
|
| 0
| 0
| 0
| 0
| У2
| У1
|
| КР-02068982-220301-2012-15-ПЗ
|
Запись единицы в бите означает активный уровень соответствующего входного или выходного сигнала, запись нуля – отсутствие активного уровня сигнала. Двоичный код входных сигналов будем хранить в регистре ввода микропроцессора, а двоичный код выходных сигналов - в регистре вывода.
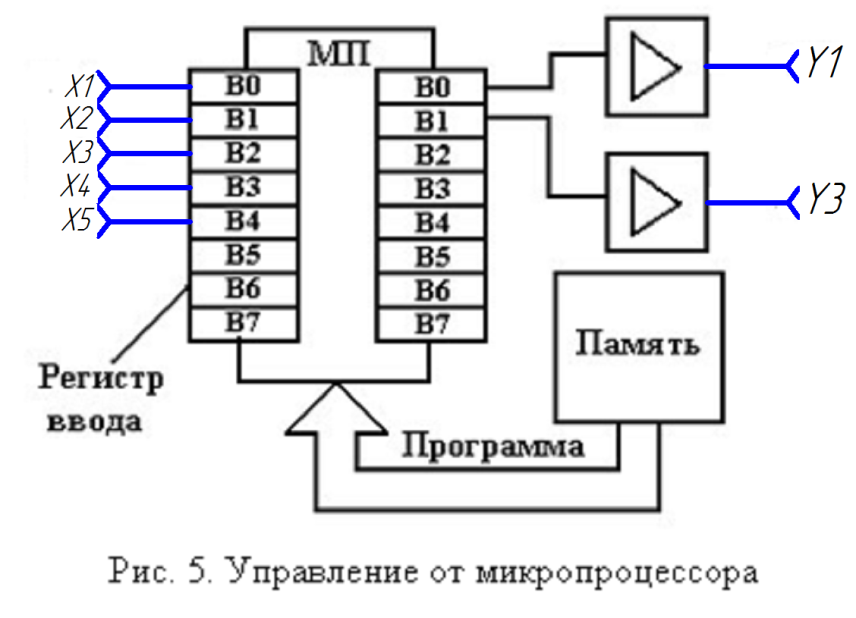
Структуру системы управления с микропроцессором можно представить в виде, показанном на рис. 5.
Усилители выходных сигналов использованы для согласования слаботочных логических выходов микропроцессора с мощной нагрузкой (электромагниты управления распределителей). В памяти микропроцессора хранится программа, которая позволяет ему реализовать логические формулы, описывающие управление роботом.
| КР-02068982-220301-2012-15-ПЗ
|
Система управления на основе комплекта К580 строится по модульному принципу, который обеспечивает подключение к единой магистрали модулей ЦП (центрального процессора), ЗУ (запоминающего устройства) и УВВ (устройства ввода-вывода).
Система управления состоит из:
1. Микропроцессора КР580ВМ80 (DD3), являющегося аналогом микропроцессора i8080 фирмы Intel.
2. Тактового генератора К580ГФ24 (DD1), предназначен для синхронизации микропроцессорной системы и вырабатывает тактовые импульсы частотой 2 МГцдля синхронизации МП, а также других схем (в последнем случае используются тактовые импульсы ТТЛ уровней). Одновременно эта микросхема обеспечивает формирование некоторых управляющих сигналов (например, сигнал сброса R).
3. Системного контроллера КР580ВК28 (DD2), предназначенного для фиксации слова-состояния МП, выработки системных управляющих сигналов, буферизации шины данных МП и управления направлением передачи по шине данных.
4. Микросхемы постоянной памяти ПЗУ К155РЕ21 (DD4) для хранения управляющей программы.
5. Микросхемы оперативной памяти ОЗУ К565РУ5 (DD5) для хранения данных, используемых при работе управляющей программы.
6. Программируемого контроллера порта ввода-вывода К580ВВ55, работающего в режиме 0 (как 4 порта ввода-вывода), причем используемый порт С(3:0) является портом ввода, к которому подсоединены преобразованные схемой (см. рис. 2) сигналы X1…X5, а порт С(7:4) является портом вывода, к которому подключены усилители сигналов Y1 и Y2 для управления электропневмоклапанами ЗП и ЗР.
| КР-02068982-220301-2012-15-ПЗ
|
Управление портами ввода-вывода осуществляется путем записи в регистр управления контроллера порта ввода-вывода КР580ВВ55 следующего управляющего слова:
| D7
| D6
| D5
| D4
| D3
| D2
| D1
| D0
|
|
|
|
|
|
| любое
| любое
| любое
|
|
| Режим 0
| Напр.
А
| Напр.
С (7,4)
| Режим
В
| Напр.
В
| Напр.
С(0,3)
|
где сигнал «0» означает вывод, сигнал «1» – ввод.
Составим алгоритм управления приводом робота для
микр
| КР-02068982-220301-2012-15-ПЗ
|
опроцессорной системы:
Рис.6 Алгоритм управления приводом робота
Для реализации управления рассматриваемым циклом движений робота схема алгоритма работы микропроцессора показана на рис. 6.
Микропроцессор обращается к регистру ввода и осуществляет ввод двоичного кода Х состояния датчиков обратной связи (блок 1). Затем в блоках 2 и 3 вычисляется значение логических функций М и L , соответствующих функциям У1 и У2; при этом В1 - содержимое соответствующего бита машинного слова.
Значения вычисленных логических функций проверяются в блоках 4 и 7, и если они равны единице, то в соответствующий бит регистра вывода также записывается единица, если же функции равны нулю, то в биты регистра вывода также записываются нули. Это обеспечит наличие на выходах системы управления управляющих сигналов, определяющих выполнение текущего элемента цикла движений робота. Задержка времени (блок 10), которая реализуется в виде подпрограммы работы микропроцессора, введена для получения требуемой периодичности опроса датчиков. Поскольку микропроцессор работает с тактовой частотой около 2 МГц, то без этой задержки ввод и вывод информации происходил бы излишне часто.
| КР-02068982-220301-2012-15-ПЗ
КУМЕНТУ
|
Вывод:В данной работы я спроектировал систему управления приводом промышленного робота и разработал электрическую принципиальную схему:
1. цифровой СУ на элементах жесткой логики серии К555,
2. микропроцессорной СУ на основе восьмиразрядной МикроЭВМ с микропроцессорным контроллером КР580ВМ80 (аналог микропроцессора i8080 фирмы Intel)
3. Построил принципиальную схему управления приводом робота.
| КР-02068982-220301-2012-15-ПЗ
|
Заключение.
На основе рассмотренного алгоритма составляется конкретная программа, которая записывается в память процессора и организует его работу. При изменении цикла движений робота программа изменяется и система управления реализует новый алгоритм управления без каких-либо структурных изменений.
По сравнению с описанной выше структурной реализацией логической схемы управления, реализация на микропроцессоре обладает значительной избыточностью. Так, например, набор команд микропроцессора составляет несколько десятков команд, а используется только часть из них, лишь частично используется машинное слово и т.д. Это допустимо в том случае, когда стоимость системы управления с микропроцессором соизмерима со стоимостью специализированных логических структур системы управления, что обеспечивается при современном массовом производстве микропроцессоров в виде сверхбольших интегральных микросхем (СБИС) сравнительно невысокой стоимости.
Достоинством микропроцессорной системы управления является ее гибкость, универсальность и высокая степень унификации, которая выступает уже не на уровне элементной базы логической структуры, а на уровне системы управления в целом.
| КР-02068982-220301-2012-15-ПЗ
|





