 |
Главная |


Системы координат. Картографические проекции. Картографические и координатные сетки. Разграфка и номенклатура карт.
|
из
5.00
|
Основная цель введения некоторой системы координат в геоинформатике - это описание положения объектов на поверхности Земли в некотором «естественном» виде.
Если мы хотим определить положение судна в океане и нам нужно проложить маршрут движения по карте, то вначале мы «естественно» должны определить широту и долготу положения судна в градусах с помощью специальных приборов. При этом мы используем географические координаты. Применение таких координат удобно с точки зрения их понимания и вычисления различными астрономическими методами, однако крайне неудобно для выполнения любых геометрических измерений и построений. Например, очень сложно определить кратчайшее расстояние между двумя пунктами на поверхности Земли, положения которых заданы в градусах.
Это связано с тем, что поверхность Земли не является плоскостью, а поэтому формулы вычисления расстояний и других геометрических измерений на реальной поверхности Земли крайне сложны.
В связи с тем, что физическая поверхность Земли имеет очень сложную форму, она в зависимости от решаемых задач аппроксимируется некоторой фигурой, достаточно просто описываемой математически, например сферой или эллипсоидом. Это позволяет разработать формулы для определения того же самого расстояния на поверхности сферы.
Однако если мы строим новый квартал в городе, то «естественно» предположить, что поверхность Земли в пределах застраиваемой территории является плоской, а потому все сложности сферической геометрии можно отбросить и использовать привычные для всех со школы формулы геометрии на плоскости. Именно поэтому проект внутриквартальной застройки «естественно» выполнить на топографическом плане, используя прямоугольные декартовы координаты в пространстве.
При этом важнейшим вопросом является выбор этой декартовой системы координат. «Естественно» предполагать, что ось Z этой системы координат должна быть направлена вверх, а другие оси - параллельно поверхности Земли в начале координат. Это нужно для того, чтобы можно было в полевых условиях измерять высоты на местности с помощью нивелира, а также определять вертикали с помощью обычного отвеса.
В то же время если мы строим большой протяжённый объект, например, дорогу, протянувшуюся на сотни или тысячи километров, то поверхность Земли на таких расстояниях будет существенно отличаться от плоскости. Отклонение поверхности Земли от касательной плоскости, в которой определена декартова система координат, составляет на расстоянии 1 км от точки касания 7,8 см, а на 10 км - уже 7,84 м! Поэтому проект строительства дороги будет разбит на участки, выполняемые в различных декартовых системах координат. Основной проблемой такого способа является стыковка участков проекта, выполненных в разных локальных системах координат. Таким образом, возникает необходимость выработки общего подхода, позволяющего легко и непротиворечиво получать локальные системы координат, взаимно увязывать их друг с другом, а также при необходимости переходить к географическим координатам.
Для этого надо построить некоторую модель поверхности всей Земли, а также определить формулы перехода от этой модели к локальным координатам и обратно. «Естественно» предполагать, что все локальные (местные) декартовы системы координат должны иметь: 1) начала координат, лежащие на модели поверхности Земли, 2) ось Z, направленную по нормали к модели поверхности. При таких предположениях, по крайней мере, измерение вертикали в локальной системе координат можно будет производить на местности с помощью обычного отвеса. Отсюда возникают следующие понятия.
Определение. Уровенной называется поверхность, ортогональная в каждой своей точке к векторам силы тяжести.
Определение. Геоидом называется уровенная поверхность, проходящая через некоторую точку начала отсчёта высот.
Однако геоид имеет крайне сложную форму и её практически невозможно математически точно описать. Поэтому в зависимости от решаемых задач форма геоида может аппроксимироваться сферой, эллипсоидом вращения, трёхосным эллипсоидом или, наиболее точно, квазuгеоuдамu.
Сложность формы геоида (как и любой другой уровенной поверхности) возникает из-за того, что Земля состоит из неравномерно распределённых масс различной плотности. Это приводит К тому, что сила тяжести на поверхности Земли в разных местах является различной. Кроме того, векторы силы тяжести имеют самые разные направления, не сходящиеся в центре масс Земли.
Определение. Общеземным называется эллипсоид вращения, плоскость экватора и центр которого совпадают с плоскостью экватора и центром масс Земли и который наилучшим образом аппроксимирует поверхность геоида.
Определение. Референц-эллuпсоuдом (референц-сферой) называется такой эллипсоид (сфера), который наилучшим образом аппроксимирует поверхность геоида на соответствующей территории Земли.
Определение. Квазuгеоuдом называется такая фигура, которая на различных участках поверхности Земли аппроксимируется различными местными референц-эллипсоидами. На территории морей и океанов поверхность квазигеоида совпадает с поверхностью геоида, а на суше она отклоняется от него в пределах двух метров.
Большинство референц-эллипсоидов являются эллипсоидами вращения, которые характеризуются длинами своих полуосей (а - расстояние от его центра до точек экватора и Ь - расстояние от центра до полюсов) и вытекающим из этих длин коэффициентом сжатия a=(а-b)/а (рис. 3.1). Вместо коэффициента сжатия эллипсоиды иногда характеризуются эксцентриситетом e=(1-(b/a)2)1/2.
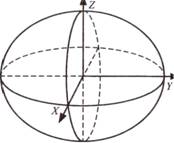
Рис. 3.1. Эллипсоид вращения
Кроме своих размеров, референц-эллипсоиды характеризуются положением центра в теле Земли и ориентацией вертикальной оси. Когда для работы на территории берётся не который местный референц-эллипсоид, то он выбирается так, чтобы максимально точно соответствовать поверхности геоида на этой территории (рис. 3.2). Именно поэтому данный референц-эллипсоид может очень сильно отличаться от поверхности геоида на других территориях.

Рис. 3.2. Аппроксимация поверхности Земли референц-эллипсоидами
Среди множества имеющихся в мире референц-эллипсоидов в России наиболее часто используется эллипсоид Красовского (а = 6378245; Ь = 6356863,0188; а = 1: 298,3), начальный пункт в Пулково, превышение геоида над референц-эллипсоидом в начальном пункте равно нулю, а измерение высот делается в Балтийской системе высот, ведущей отсчёт от нуля Кронштадтского футштока. Эта система координат называется СК-42, так как она была разработана в 1942 г., а с 1946 г. была введена в эксплуатацию на территории СССР. Тем не менее, на Дальнем Востоке иногда используется другая система высот от уровня Охотского моря.
В России с 1 июля 2002 г. обязательным к применению является система координат СК-95 (на основе эллипсоида Красовского, но несколько смещенного и повернутого относительно СК-42) для всех геодезических и картографических работ, а для геодезического обеспечения орбитальных полетов - ПЗ-90 (Параметры Земли 1990 г.), имеющая параметры а = 6378136; Ь = 6356751; а = 1 : 298,25279401.
Тем не менее в последнее время в России все чаше стал также применяться международный референц-эллипсоид WGS-84 (а = 6378137; Ь = 6356752; а = 1 : 298,25284078). Это связано с тем, что в системе этого референц-эллипсоида выдают координаты приёмники американской системы глобального позиционирования GPS, которая всё шире применяется в практике геодезических работ.
В математической картографии используются пространственные прямоугольные, криволинейные, плоские прямоугольные и полярные системы координат.
Самой простой является пространственная прямоугольная геоцентрическая система координат, начало которой совмещено с центром Земли, ось Z направлена на Северный полюс Земли, ось Х - на точку пересечения Гринвичского меридиана с экватором, а ось У - на восток от Гринвича (рис. 3.3). В качестве точки Северного полюса обычно используют условный земной полюс (международное' условное начало), которая вместе с центром масс Земли определяет некоторое фиксированное среднее положение оси вращения Земли. Это связано в основном с прецессией - астрономическим явлением, заключающимся в том, что ось вращения Земли со временем перемещается в теле Земли и относительно звезд.
В то же время на практике обычно используются различные квазигеоцентрические системы координат, центр которых и угол наклона осей несколько иные. Именно поэтому имеются специальные формулы для пересчёта координат из одной системы координат в другую:

где xo,Yo,zo - координаты начала координат второй системы в первой; М - масштабный коэффициент; ɛx,ɛу,ɛz - разворот осей на малые углы.
Ориентация используемого референц-эллипсоида характеризуется смещением от центра масс Земли и отклонением его оси относительно оси вращения Земли.
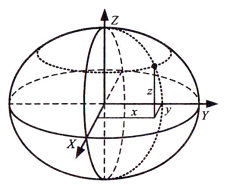
Рис. 3.3. Геоцентрическая система координат
Однако более привычной является географическая (геодезическая) система координат, когда координаты точки на поверхности эллипсоида определяются широтой φ и долготой λ, измеряемыми в градусах от экватора и от Гринвичского меридиана соответственно (рис. 3.4). Координаты любой точки в пространстве складываются из широты и долготы её проекции по нормали на эллипсоид и высоты Н точки относительно эллипсоида.
В связи с тем, что широта и долгота точки на местности зачастую определяются с помощью астрономических наблюдений, географические координаты также иногда называются астрономическими.

Рис. 3.4. Географическая (геодезическая) система координат
Использование вышеприведённых геоцентрической и географической систем координат не всегда удобно. Так, при работе на не60льших участках земной поверхности чаше применяется топоцентрическая (горизонтная) система координат, которая является обычной прямоугольной пространственной системой координат и характеризуется некоторой начальной точкой Qo (φ0, λ0, H0), задаваемой в географической системе координат (H0- это высота точки Qo над уровнем референц-эллипсоида). Ось Z топоцентрической системы координат совпадает с нормалью к поверхности эллипсоида, проходящей через Qo, ось х лежит в плоскости меридиана и направлена на Северный полюс, а ось Y направлена на восток (рис. 3.5).

Рис. 3.5. Топоцентрическая (горизонтальная) система координат
Кроме вышеупомянутых, также широко используется полярная сфероидическая (сферическая) система координат. В этой системе отсчёт ведётся от точки нового полюса Qo (φ0, λ0), задаваемого в географической системе координат (рис. 3.6). Положение любой точки С на поверхности эллипсоида задаётся двумя углами a и z. Угол а (азимут) измеряется между нормальными плоскостями в точке полюса, одна из которых проходит через старые полюса эллипсоида, а другая - через точку С. Угол z определяется как СО' Qo, где точка О' является точкой пересечения вертикальной оси референц-эллипсоида с нормалью к эллипсоиду, проведённой через точку нового полюса. Слово «полярная» в названии данной системы координат призвано подчеркнуть, что координаты а и z можно представлять себе как полярные угол и радиус соответственно, только на поверхности эллипсоида, а не на плоскости.

Рис. 3.6. Полярная сфероидическая (сферическая) система координат
Отметим, что в математической картографии иногда также используется «почти обычная» полярная система координат - так называемая полярная геодезическая система координат. В этой системе отсчёт, так же как и в предыдущем случае, ведётся от точки нового полюса Qo (φ0, λ0), задаваемого в географической системе координат (рис. 3.7). Положение любой точки C на поверхности эллипсоида задаётся длиной геодезической линии s от Qo до с и азимутом а - углом между нормальными плоскостями в точке полюса, одна из которых проходит через старые полюса эллипсоида, а другая - через точку С (геодезической линией между двумя заданными точками на некоторой поверхности называется кратчайшая линия, связывающая эти две точки на данной поверхности).

Рис. 3.7. Полярная геодезическая система координат
Все вышеприведённые системы координат предназначены для задания «абсолютных координат», то есть координат, не зависящих от положения никаких объектов в пространстве.
В противовес абсолютным часто используются различные относительные координаты, в которых отсчёт ведётся от некоторых заметных объектов на местности.
Относительные системы координат бывают двух основных видов:
1. Относительная полюсная система координат. В этих координатах отсчёт ведётся от полюсов - некоторых известных точек на местности, заданных либо в абсолютной системе координат, либо в описательном виде. Положение любой другой точки на местности может задаваться как азимут и расстояние от некоторого полюса либо как расстояния от двух полюсов.
С помощью таких координат очень часто задаётся положение объектов подземных инженерных коммуникаций (колодцев, труб, кабелей) на картах местности, например в терминах «4 метра на север от угла дома» или «в 5 метрах от угла дома и на расстоянии 6 метров от стены трансформаторной подстанции) (рис. 3.8).

Рис. 3.8. Задание положения инженерных коммуникаций с помощью относительной полюсной системы координат
Эта система координат позволяет задать положение объектов на плане, а также в пространстве, добавляя в описание координат смещение по высоте искомой точки от плановой («2 метра под землей») или от базовой точки («3 метра ниже отметки на стене дома»).
2. Относительная линеаризованная (пикетажная) система координат. В этой системе за основу берётся некоторая базовая кривая, положение которой задано в абсолютной системе координат. Кроме того, на этой кривой выбирается некоторая базовая точка B (обычно это начало кривой). Положение любой иной точки е на базовой кривой считается как кратчайшее расстояние от этой точки до базовой точки вдоль базовой кривой. Такое расстояние часто называют пикетажным расстоянием или пикетажем. для определения положения любой точки P на плоскости, не лежащей на базовой прямой, нужно найти ближайшую точку е на базовой прямой. Положением точки P будет считаться пара величин («пикетаж + смещение», где «пикетаж» - это пикетаж точки е относительно В, а «смещение» - это расстояние от P до С. Причём если точка Р располагается справа от кривой ВС, то смещение берётся со знаком плюс, иначе - со знаком минус (рис. 3.9).

Рис. 3.9. Задание положения объектов инженерного обустройства автомобильной дороги с помощью линеаризованной системы координат
|
из
5.00
|
Обсуждение в статье: Системы координат. Картографические проекции. Картографические и координатные сетки. Разграфка и номенклатура карт. |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы