 |
Главная |


Синхронные шаговые двигатели
|
из
5.00
|
Шаговыми двигателями называются синхронные двигатели, преобразующие команду, заданную в виде импульсов, в фиксированный угол поворота двигателя или в фиксированное положение подвижной части двигателя. Шаговый двигатель имеет не менее двух положений устойчивого равновесия ротора в пределах одного оборота.
В качестве шаговых применяют синхронные двигатели без обмотки возбуждения на роторе: с постоянными магнитами, реактивные и индукторные (с подмагничиванием). Для получения требуемых статических характеристик и динамических свойств их выполняют без пусковой обмотки, с ротором минимального диаметра и рассчитывают на большие электромагнитные нагрузки.
Шаговые двигатели целесообразно применять для привода механизмов, имеющих старт-стопное движение, или механизмов, с непрерывным движением, если управляющий сигнал задан в виде последовательности импульсов, например, лентопротяжных устройств для ввода и вывода информации, счетчиков, приводов станков с программным управлением и т. д.
Мощность выпускаемых шаговых двигателей лежит в диапазоне от единиц ватт до одного киловатта.
Напряжение питания обмоток управления шагового двигателя представляет собой последовательность однополярных или двуполярных прямоугольных импульсов, поступающих от электронного коммутатора. Результирующий угол поворота ротора соответствует числу переключений коммутатора, а частота вращения двигателя соответствует частоте переключений электронного коммутатора.
По конструктивным особенностям различаются шаговые двигатели активного типа (с постоянными магнитами), реактивного типа и индукторные.
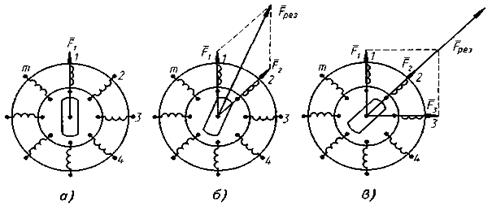
На рис. 5.7 изображена схема m-фазного шагового двигателя без обмотки возбуждения на роторе.
Если питать поочередно фазы 1, 2, 3, ..., m обмотки якоря рассматриваемого двигателя одно полярными импульсами напряжения, то ротор двигателя будет скачкообразно перемещаться в положения, при которых его ось совпадает с осями фаз 1, 2, 3 и т. д.
|
| Рис. 5.7. К принципу действия шагового двигателя |
 Ротор при этом будет иметь т устойчивых состояний, соответствующих направлению вектора МДС F обмотки якоря в данный момент времени; при этом шаг ротора равен 2π/m
Ротор при этом будет иметь т устойчивых состояний, соответствующих направлению вектора МДС F обмотки якоря в данный момент времени; при этом шаг ротора равен 2π/m
Для увеличения результирующей МДС якоря и синхронизирующего момента одновременно подают питание на две, три и большее количество фаз. Например, если одновременно подать напряжение на две фазы, то положение результирующего вектора МДС F и оси ротора совпадает с линией, проходящей между осями двух соседних фаз (рис. 5.7,6). При подаче питания одновременно на три соседние фазы ротор перемещается в положение, совпадающее с осью средней фазы (рис. 5.7,6). Если поочередно включать четное (две), или нечетное (одна, три) число фаз, то ротор двигателя будет иметь 2т устойчивых состояния и шаг двигателя будет равен π/m.
Управление двигателем, при котором фазы обмотки якоря включают поочередно равными группами по две, три и т. д., называют симметричным, поочередное включение неравных групп фаз — несимметричным.
Шаговые двигатели с постоянными магнитами имеют ротор в виде постоянного магнита (звездочки) литой или составной конструкции без полюсных наконечников. Статор имеет явновыраженные полюсы, на которых в полузакрытых пазах размещают катушки обмотки якоря. Обмотка статора может быть двух-, трех-, четырехфазной. В многополюсных машинах число пазов на полюс и фазу q = 1, т. е. обмотку выполняют сосредоточенной. Шаговые двигатели этого типа называют также магнитоэлектрическими.
|
В двигателе с двухфазной обмоткой якоря при последовательной подаче импульсов напряжения на катушки полюсов ось магнитного потока скачкообразно перемещается на 90° (рис. 5.8).
| Рис. 5.8. Последовательность перемещения ротора шагового двигателя |
В результате под действием синхронизирующего момента при каждом импульсе ротор поворачивается на 90°, т. е. делает шаг, равный 90°.
Возникновение синхронизирующего момента в шаговом двигателе при подаче питания на фазы обмотки якоря обусловлено теми же причинами, что и в синхронном двигателе обычного исполнения.
Каждому импульсу тока соответствует определенное положение ротора двигателя. Чтобы изменить направление вращения ротора, следует изменить полярность включения одной из фаз обмотки якоря, не меняя очередность их коммутации. Для уменьшения шага ротора шаговые двигатели выполняют многополюсными. При этом число полюсных выступов на роторе должно быть равно числу полюсов статора. Наиболее часто используют восьмиполюсные шаговые двигатели. Шаг двигателя представляет собой угол поворота ротора за один такт:
 ,(5.11)
,(5.11)
где k — число тактов в одном цикле; р — число пар полюсов. Частота вращения ротора двигателя зависит от частоты подачи импульсов:
 (5.12)
(5.12)
Диапазон изменения частоты при четырехтактной коммутации обычно составляет 0...500 Гц; максимальной частоте соответствует частота вращения до 3000 мин-1.
Чаще всего шаговые двигатели имеют четырехфазную обмотку, которая может управляться однополярными импульсами напряжения, что упрощает конструкцию электронного коммутатора. При подключении к коммутатору фазы такой обмотки соединяют в четырехлучевую звезду с выведенной общей точкой.
Реактивные шаговые двигатели имеют ротор из магнитно-мягкого материала. На статоре обычно располагают трехфазную сосредоточенную обмотку, фазы которой получают питание от электронного коммутатора. Реактивные шаговые двигатели называют также параметрическими.
Шаг реактивного двигателя можно уменьшить, если увеличить число выступов на роторе. На рис. 5.9 показаны три такта работы шагового двигателя с крестообразным ротором. При той же последовательности подачи импульсов, что и для двигателя, показанного на рис. 5.8, шаг этого двигателя составляет 15°.
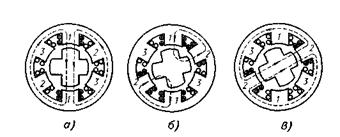
Рис. 5.9. Такты работы шагового реактивного двигателя
с крестообразным ротором
Дальнейшее уменьшение шага, т. е. повышение точности работы двигателя, можно обеспечить, увеличив число выступов на статоре и роторе, т. е. перейдя к схеме редукторного двигателя.
При малом шаге (1°...5°) применяют реактивный редукторный шаговый двигатель с гребенчатыми выступами на статоре. Выпускаемые отечественной промышленностью реактивные редукторные шаговые двигатели имеют на статоре шесть полюсных выступов с гребенчатой зубцовой зоной.
У активных шаговых двигателей есть существенный недостаток: они имеют крупный шаг, который может достигать десятков градусов.
Реактивные шаговые двигатели позволяют редуцировать частоту вращения ротора. В результате можно получить шаговые двигатели с угловым шагом, составляющим доли градуса. Отличительной особенностью реактивного редукторного двигателя является расположение зубцов на полюсах статора (рис. 5.10).
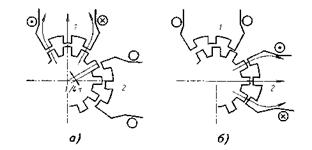
Рис. 5.10. Принцип действия реактивного редукторного
шагового двигателя:
а — при возбужденном полюсе /;
б — при возбужденном полюсе 2 (шаг 1/4т)
При большом числе зубцов ротора Zpего угол поворота значительно меньше угла поворота поля статора. Величина углового шага редукторного реактивного шагового двигателя определится выражением:
 .(5.13)
.(5.13)
Электромагнитный синхронизирующий момент реактивного двигателя обусловлен, как и в случае обычного синхронного двигателя, разной величиной магнитных сопротивлений по продольной и поперечной осям двигателя.
Основным недостатком шагового реактивного двигателя является отсутствие синхронизирующего момента при обесточенных обмотках статора.
Повышение степени редукции шаговых двигателей, как активного типа, так и реактивного, можно достичь применением двух, трех и многопакетных конструкций. Зубцы статора каждого пакета сдвинуты относительно друг друга на часть зубцового деления. Если число пакетов равно двум, то этот сдвиг равен 1/2 зубцового деления, если три, то — 1/3, и т. д. В то же время роторы-звездочки каждого из пакетов не имеют ' пространственного сдвига, т. е. оси их полюсов полностью совпадают.
Такая конструкция сложнее в изготовлении и дороже однопакетной, и, кроме того, требует сложного коммутатора.
Стремление совместить преимущества активного шагового двигателя (большой удельный синхронизирующий момент на единицу объема, наличие фиксирующего момента) и реактивного шагового двигателя (малая величина шага) привело к созданию гибридных индукторных шаговых двигателей. В настоящее время имеется большое число различных конструкций индукторных двигателей, которые отличаются числом фаз, размещением обмоток, способом фиксации ротора при обесточенном статоре и т. д.
Во всех конструкциях гибридных индукторных шаговых двигателей вращающий момент создается за счет взаимодействия магнитного поля, создаваемого обмотками статора и постоянного магнита в зубчатой структуре воздушного зазора. При этом синхронизирующий момент шагового индукторного двигателя по природе является реактивным и создается намагничивающей силой обмоток статора, а постоянный магнит, расположенный либо на статоре, либо на роторе, создает фиксирующий момент, удерживающий ротор двигателя в заданном положении при отсутствии тока в обмотках статора.
По сравнению с шаговым двигателем реактивного типа у индукторного шагового двигателя при одинаковой величине шага больше синхронизирующий момент, лучшие энергетические и динамические характеристики.
Линейные шаговые синхронные двигатели.При автоматизации производственных процессов весьма часто необходимо перемещать объекты в плоскости (например, в графопостроителях современных ЭВМ и т. д.). В этом случае приходится применять преобразователь вращательного движения в поступательное с помощью кинематического механизма.
Линейные шаговые двигатели преобразуют импульсную команду непосредственно в линейное перемещение. Это позволяет упростить кинематическую схему различных электроприводов (рис. 5.11).
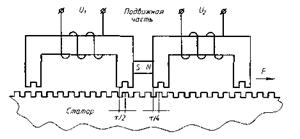
Рис. 5.11. Схема линейного шагового двигателя
Статор линейного шагового двигателя представляет собой плиту из магнитомягкого материала. Подмагничивание магнитопроводов производится постоянным магнитом. Зубцовые деления статора и подвижной части двигателя равны. Зубцовые деления в пределах одного магнитопровода ротора сдвинуты на половину зубцового деления τ/2. Зубцовые деления второго магнитопровода сдвинуты относительно зубцовых делений первого магнитопровода на четверть зубцового деления τ/4. Магнитное сопротивление потоку подмагничивания не зависит от положения подвижной части.
Принцип действия линейного шагового двигателя не отличается от принципа действия индукторного шагового двигателя. Разница лишь в том, что при взаимодействии потока обмоток управления с переменной составляющей потока подмагничивания создается не момент, а сила FС, которая перемещает подвижную часть таким образом, чтобы против зубцов данного магнитопровода находились зубцы статора, т. е. на четверть зубцового деления τ/4.
 (5.14)
(5.14)
где КТ — число тактов схемы управления.
Для перемещения объекта в плоскости по двум координатам применяются двухкоординатные линейные шаговые двигатели.
В линейных шаговых двигателях применяют магнито-воздушную подвеску. Ротор притягивается к статору силами магнитного притяжения полюсов ротора. Через специальные форсунки под ротор нагнетается сжатый воздух, что создает силу отталкивания ротора от статора. Таким образом, между статором и ротором создается воздушная подушка, и ротор подвешивается над статором с минимальным воздушным зазором. При этом обеспечивается минимальное сопротивление движению ротора и высокая точность позиционирования.
Шаговый двигатель работает устойчиво, если в процессе отработки угла при подаче на его обмотки управления серии импульсов не происходит потери ни одного шага. Это значит, что в процессе отработки каждого из шагов ротор двигателя занимает устойчивое равновесие по отношению к вектору результирующей магнитной индукции дискретно вращающегося магнитного поля статора.
Режим отработки единичных шагов соответствует частоте импульсов управления, подаваемых на обмотки шагового двигателя, при котором шаговый двигатель отрабатывает до прихода следующего импульса заданный угол вращения αш. В начале каждого шага угловая скорость вращения двигателя равна 0.
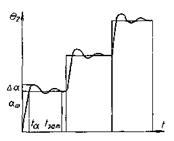
При этом возможны колебания угла Да поворота ротора двигателя относительно установившегося значения, которые обусловлены запасом кинетической энергии, накопленной ротором при отработке угла αш (рис. 5.12). По мере отработки управляющих импульсов растер угол поворота ротора Ɵ2. Кинетическая энергия ротора преобразуется в потери: механические, магнитные и электрические. Чем больше величина перечисленных потерь, тем быстрее заканчивается переходный процесс отработки единичного шага двигателем.
|
|
|
|
|
Рис. 5.12. Процесс отработки шагов  шаговым двигателем за время шага ta шаговым двигателем за время шага ta
|
В процессе пуска ротор может отставать от потока статора на шаг и более; в результате может быть расхождение между числом шагов ротора и потока статора.
Основными характеристиками шагового двигателя являются: шаг, предельная механическая характеристика и приемистость. Предельной механической характеристикой называют зависимость максимального синхронизирующего момента от частоты управляющих импульсов (рис. 5.13).
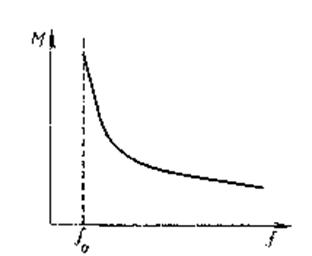
Рис. 5.12. Процесс отработки шагов  шаговым двигателем за время
шаговым двигателем за время 
При высоких частотах вращения (2000...3000 об/мин) применяют шаговые двигатели с постоянными магнитами, расположенными на роторе. Наличие активного ротора позволяет получить относительно большие моменты и обеспечить фиксацию ротора при обесточенных обмотках. При низких частотах вращения (до 1000 об/мин) и малом шаге применяют индукторные и реактивные двигатели с гребенчатыми выступами на полюсах статора.
Редукторные двигатели
Синхронные редукторные микродвигатели — это машины, частота вращения ротора которых зависит от числа зубцов ротора. Редукторные трех- и двухфазные индукторные машины широко применяют в качестве генераторов и в качестве двигателей.
Синхронная частота вращения поля двигателя:
 . (5.15)
. (5.15)
Синхронная частота вращения ротора:
 .(5.16)
.(5.16)
Таким образом отношение:
 (5.17)
(5.17)
Величину, kред называют коэффициентом редукции. Он показывает, во сколько раз частота вращения ротора меньше частоты вращения магнитного поля, поэтому индукторные двигатели часто называют редукторными.
Редукторные двигатели могут быть трех типов: с электромагнитным возбуждением (на статоре или роторе), с постоянными магнитами или без возбуждения (реактивные). В зависимости от расположения обмотки возбуждения или постоянных магнитов различают двигатели с осевым и радиальным возбуждением.
На рис. 5.14 изображено устройство редукторного реактивного двигателя. Двигатель состоит из статора 1 с трех- или двухфазной обмоткой, расположенной на полюсах 3 статора и ротора 4, имеющего зубцы. В редукторном реактивном двигателе число пазов больше или меньше числа пазов ротора, т. е. зубцовые деления статора и ротора различны. Принцип действия реактивного редукторного двигателя сводится к следующему. В исходный момент времени ось магнитного потока совпадает с осью полюсов статора, и ротор расположен так, что магнитное сопротивление для потока, замыкающегося по этой оси, является минимальным.
Рис. 5.15. Устройство редукторного реактивного двигателя
Когда ось вращающегося магнитного потока повернется и будет совпадать с осью соседних полюсов, на зубцы, расположенные под этими полюсами, будет действовать реактивный момент. При этом ротор повернется на 1/3 зубцового деления против направления вращения поля так, что зубцы на роторе встанут против зубцов на этих полюсах. При дальнейшем вращении магнитного поля будет, происходить и вращение ротора, но повороту поля на половину окружности якоря будет соответствовать поворот ротора всего на одно зубцовое деление. Таким образом, коэффициент редукции

Обычно 2р = 2 и частота вращения ротора:
 (5.18)
(5.18)
Пуск в ход редукторных двигателей осуществляется при помощи короткозамкнутой обмотки, расположенной на роторе. Если частота вращения низка, а ротор имеет малый момент инерции, то он может втягиваться в синхронизм непосредственно, без каких-либо пусковых устройств.
Мощность редукторных двигателей находится в пределах 1...40 Вт. КПД их составляет 20...40%.
Наряду с двигателями в системах следящего привода, в радиолокационных и гироскопических устройствах широко используются индукторные генераторыповышенной частоты, находящейся в пределах от 400 до 30000 Гц. В конструктивном отношении генераторы отличаются от двигателей тем, что имеют на статоре кроме обмотки переменного тока еще обмотку возбуждения, питаемую постоянным током. Роторы индукционных генераторов выполняют без обмоток с большим числом зубцов. Таким образом, в основе принципа работы индукционных генераторов лежит действие зубцовых гармоник. Индукторные генераторы имеют более низкий КПД, чем обычные синхронные машины, что объясняется значительным увеличением добавочных потерь в стали и обмотке якоря из-за высокой частоты перемагничивания.
|
из
5.00
|
Обсуждение в статье: Синхронные шаговые двигатели |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы