 |
Главная |


III. Апериодическое звено первого порядка
|
из
5.00
|

 , где
, где  - параметры звена
- параметры звена
Для получения передаточной функции используем преобразование Лапласа и разделим все уравнение на  , в результате получим:
, в результате получим:

Вводим замену переменных:
 , где Т – постоянная времени звена
, где Т – постоянная времени звена
 , где К – коэффициент усиления
, где К – коэффициент усиления
Получаем:


3Т – длительность процесса
3. Весовая характеристика
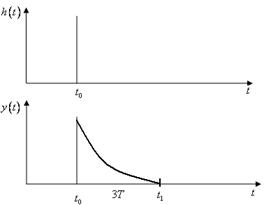
,
Весовая характеристика показывает, что апериодическое звено первого порядка обладает инерционностью. Данная характеристика показывает чувствительность звена при единичном импульсном воздействии.
4.Амплитудно-частотная характеристика


При 

При частотах близким к нулевым, максимальное значение амплитуды не превышает значения К.
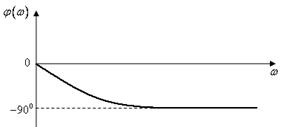
5. Фазо-частотная характеристика

6. Комплексная характеристика


Точка пересечения годографа и единичной окружности является характеристической точкой и вектор, проведенный из центра в эту точку, определяет запас устойчивости по фазе входного сигнала  , а расстояние от крайней левой точки годографа до точки
, а расстояние от крайней левой точки годографа до точки  называется h и определяет запас устойчивости по амплитуде входного сигнала.
называется h и определяет запас устойчивости по амплитуде входного сигнала.
Другими словами годограф комплексной характеристики показывает границу устойчивости работы звена.
16.11.2006 Лекция 9
§ 2.11 Реально-интегрирующее звено, как математическая модель движения судна.
Основываясь на втором законе Ньютона, в общем виде движение подвижного объекта, оснащенного неким движителем, может быть описано формулой:
 , где I – момент инерции создаваемый движителем,
, где I – момент инерции создаваемый движителем,  - угловая скорость, L - сумма моментов сил, действующих на корпус судна в результате перекладки пера руля и внешних факторов. С другой стороны,
- угловая скорость, L - сумма моментов сил, действующих на корпус судна в результате перекладки пера руля и внешних факторов. С другой стороны,  , здесь
, здесь  - гидродинамические коэффициенты, зависящие от самой конструкции корпуса судна, шага винта, обрастания и т.д. , и представляют собой сложные эмпирические зависимости, которые рассчитываются при испытаниях головной модели в серии.
- гидродинамические коэффициенты, зависящие от самой конструкции корпуса судна, шага винта, обрастания и т.д. , и представляют собой сложные эмпирические зависимости, которые рассчитываются при испытаниях головной модели в серии.
 - угол перекладки пера руля
- угол перекладки пера руля
 - скорость изменения положения ДП судна относительно вертикальной оси
- скорость изменения положения ДП судна относительно вертикальной оси
 - суммарный момент сил внешних факторов, действующих на судно.
- суммарный момент сил внешних факторов, действующих на судно.
 |

Учитывая, что  , получаем
, получаем
Используем преобразование Лапласа и разделим все уравнения на  , в результате получим:
, в результате получим:

Обозначим :
 - постоянная времени судна, описывает инерционные характеристики судна.
- постоянная времени судна, описывает инерционные характеристики судна.
 - коэффициент усиления по управлению. Описывает эффективность воздействия пера руля.
- коэффициент усиления по управлению. Описывает эффективность воздействия пера руля.
 - коэффициент усиления по внешнему воздействию.
- коэффициент усиления по внешнему воздействию.
Подставим в уравнение, получим:
 - основное уравнение для получения передаточной функции.
- основное уравнение для получения передаточной функции.
- Рассмотрим случай движения судна при
 и
и  (движение судна при нормальных условиях).
(движение судна при нормальных условиях).  - передаточная функция по управляющему воздействию.
- передаточная функция по управляющему воздействию. - Рассмотрим движение судна при
 и
и  (прямолинейное движение судна при воздействии внешних факторов)
(прямолинейное движение судна при воздействии внешних факторов)
 - передаточная функция по внешнему фактору.
- передаточная функция по внешнему фактору.

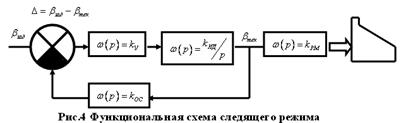
 , где
, где
 - усилительное звено
- усилительное звено
 - интегрирующее звено
- интегрирующее звено
 - апериодическое звено
- апериодическое звено

§ 2.12 Система автоматического удержания судна на заданном курсе.
Различают несколько режимов работы современного авторулевого:
- Ручное управление
- Полуавтоматическое (следящий режим)
- Автоматическое управление
1. Рассмотрим ручное управление
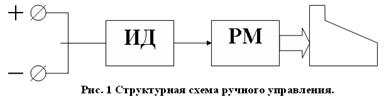
ИД – исполнительный двигатель
РМ – рулевая машина


Алгебра передаточных функций


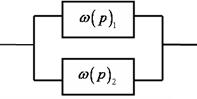

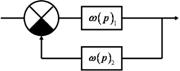

Знак в знаменателе определяется типом обратной связи. При положительной - «-», а при отрицательной – «+».
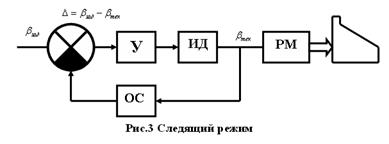

Быстродействие данного режима определяется коэффициентом обратной связи.


Коэффициент обратной связи (КОС) влияет на быстродействие системы в целом.
Качество регулирования определяется блоком коррекции:
- Интегратор учитывает (компенсирует) снос судна из-за действия ветра и течения.
- Тахогенератор влияет на перерегулирование
- Сельсин-трансформатор вырабатывает сигнал, пропорциональный углу поворота штурвала.
Таким образом качество переходного процесса определяется КОС, интегратором и тахогенератором.
21.11.2006 Лекция 10
На выходе блока коррекции сигнал представлен следующей формулой:

Для подстройки авторулевого к текущим условиям плавания необходимо использовать 3 коэффициента: 
§ 2.13 Адоптивные системы автоматического управления.
Данные системы характеризуются тем, что управляющий алгоритм автоматически, целенаправленно изменяется для достижения успешного или в каком-либо смысле оптимального управления.

Все адаптивные САУ делятся на 3 вида:
Самонастраивающаяся система – адаптация в данной системе осуществляется путем изменения параметров управляющих воздействий

1. Самоорганизующаяся система – система, в которой адаптация осуществляется путем изменения не только параметров  , но и структура управляющего устройства. (т.е. меняется алгоритм обработки результатов измерений).
, но и структура управляющего устройства. (т.е. меняется алгоритм обработки результатов измерений).
2. Самообучающаяся САУ – это САУ, в которой оптимальный режим работы объекта управления определяется при помощи управляющего устройства, алгоритм которого автоматически целенаправленно совершенствуется в процессе обучения, путем автопоиска. При этом при выборе решения, система автоматически запоминает все предыдущие состояния.
§ 2.14 Устойчивость САУ.
Устойчивость САУ – способность системы самостоятельно приходить к последующему установившемуся состоянию после приложения воздействия, которое её вывело из равновесия.
Определение, является ли система устойчивой при заданных параметрах, возможно различными методами, которые основываются на установлении факта отрицательности вещественных корней характеристического уравнения без нахождения их значения.
§ 2.15 Алгебраические критерии устойчивости Рауса и Гурвица.
Алгебраический критерий позволяет установить по результатам алгебраических действий над коэффициентами характеристического уравнения устойчива САУ или нет.
1873 год – Раус впервые предложил этот алгебраический критерий
1875 год – Гурвиц улучшил этот критерий, сократив его формулировку.
Определение критерия.
Вещественные части корней характеристического уравнения будут отрицательны, если все коэффициенты и диагональные миноры главного определителя будут положительны.
 , где n – порядок характеристического уравнения.
, где n – порядок характеристического уравнения.
Главный определить характеристического уравнения составляется так, что по главной диагонали выписываются коэффициенты уравнения, начиная с в возрастающем порядке до  . От каждого коэффициента главной диагонали по вертикали вверх выписываются коэффициенты с возрастающими, а вниз с убывающими индексами.
. От каждого коэффициента главной диагонали по вертикали вверх выписываются коэффициенты с возрастающими, а вниз с убывающими индексами.
Места в матрице с индексами больше n и меньше 0 заполняются нулями.
Рассмотрим САУ третьего порядка.

В общем виде имеем:

Составляем главный определитель:

Находим диагональный минор главного определителя:

Вывод: система устойчива.
23.11.2006
Частотный критерий Найквеста.
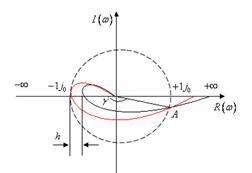 Система автоматического управления будет устойчива в том случае, если годограф передаточной функции не охватывает точку
Система автоматического управления будет устойчива в том случае, если годограф передаточной функции не охватывает точку  . В противном случае система не устойчива.
. В противном случае система не устойчива.

Если через точку с координатами провести окружность единичного радиуса с центром в точке  , то получим точку пересечения годографа передаточной функции с окружностью (точка А). Угол определяет запас устойчивости системы по фазе входного сигнала (
, то получим точку пересечения годографа передаточной функции с окружностью (точка А). Угол определяет запас устойчивости системы по фазе входного сигнала (  и
и  ) . Запас устойчивости по модулю амплитуды входного сигнала определяется отрезком h, который ограничивает устойчивость системы в целом.
) . Запас устойчивости по модулю амплитуды входного сигнала определяется отрезком h, который ограничивает устойчивость системы в целом.
Особенности критерия:
- Различают характеристики первого и второго рода
а) характеристика первого рода называется годограф пересекающий ось абсцисс справа от точки
 б)
б)
График устойчивой системы второго рода.

График неустойчивой системы.
В случае, если годограф передаточной функции проходит через точку , то система находится на грани устойчивости (консервативная система)
ГЛАВА 3
Надёжность ситемы автоматического управления.
§ 3.1 Основные понятия и определения.
Комплекс – это два или более изделия, не соединенные сборочными операциями, но предназначены для выполнения взаимосвязанных функций.
Система – это изделие состоящее из комплектующих частей, соединенных сборочными операциями и предназначенное для выполнения определенной функции.
Надежность – сложное свойство, включает в себя:
- безотказность – свойство системы непрерывно сохранять свою работоспособность в течение заданного времени.
- живучесть - свойство системы сохранять работоспособность полностью или частично в условиях неблагоприятных воздействий, непредусмотренных нормальными условиями эксплуатации.
- ремонтопригодность – свойство системы, заключающееся в приспособленности её к обнаружению отказов и восстановлению работоспособности путём замены или ремонта отказавших элементов.
- достоверность информации – т.е. в данном случае отказывает не аппаратура, а «информация».
Различают следующие виды надежности:
- аппаратурная надежность – обусловлена состоянием технических деталей.
- программная надёжность – обусловлена состоянием программного обеспечения.
- функциональная надёжность – обусловлена надёжностью выполнения отдельных функций возлагаемых на систему.
В основе понятия надёжности объекта лежит понятие «отказ системы».
Т.е. событие заключается в том, что объект либо полностью, либо частично теряет свойство работоспособности.
Количественные показатели надежности:
- вероятность безотказной работы системы в течение заданного времени

- среднее время безотказной работы

- интенсивность отказов

- эксплуатационные коэффициенты:
- коэффициент готовности 
- коэффициент вынужденного простоя 
- коэффициент расхода элементов 
5. Вероятность безопасной работы системы – случайная функция времени, в течение которого не возникает ни одного отказа.
6. Вероятность отказа – противоположная функция появляемости событий.
Функциональная надежность Навигационной аппаратуры определяется комплексом мер:
Одобренный проект Регистром на установку данного изделия на судно.
В проект включается: расположение антенн для решения вопроса о электромагнитной совместимости, расположение основного прибора для удобства использования, монтаж оборудования (крепление устройства, прокладка кабелей, прохождение водонепроницаемых переборок, подключение к источнику питания).

По требованиям SOLAS аккумуляторы должны обеспечивать работу оборудования ГМССБ в течении 6 часов.
Квалифицированная эксплуатация бортовой аппаратуры.
|
из
5.00
|
Обсуждение в статье: III. Апериодическое звено первого порядка |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы