 |
Главная |


I. Безинерционное (усилительное) звено
|
из
5.00
|
ГЛАВА 1
Основы автоматических измерений.
§ 1.1 Вероятностные и статистические характеристики воздействий и процессов.
Любые автоматические измерения могут быть описаны формулой вида:
 , где:
, где:
 - значение измеренного параметра
- значение измеренного параметра
 - истинное значение измеренного параметра
- истинное значение измеренного параметра
 - систематическая погрешность измерений
- систематическая погрешность измерений
 - случайная погрешность измерений
- случайная погрешность измерений
Основная задача любого измерителя свести погрешности измерений к min. Для снижения влияния случайных погрешностей используются соответствующие вероятностные алгоритмы обработки результатов измерений которые основываются на избыточном количестве измерений.
03.10.2006 Лекция 3
§ 1.2 Группы погрешностей.
Различают 3 группы погрешностей:
- методические погрешности – обусловленные неточностью исходных математических моделей, описывающих воздействия и процессы измерений.
- инструментальные погрешности - вызванные несовершенством измерительной аппаратуры. Причины – схемные и конструктивные недостатки устройств, недостаточная чувствительность приборов, погрешности регулировок и калибровок, а также зависимость показаний приборов от напряжений источников тока.
- третья группа обусловлена условиями, в которых проводятся измерения – тепловые и электромагнитные помехи (гроза), электромагнитная совместимость, тропосферная и ионосферная рефракция и т.д.
Чтобы учитывать случайные и систематические погрешности, необходимо знать:
- закон распределения случайных погрешностей измерений
- числовые количественные характеристики:
1. математическое ожидание
2. дисперсия
3. корреляция
4. автокорреляция
5. корреляционная функция
6. спектральная плотность погрешности измерений.
- тип измеряемого процесса:
1. стационарный
2. эргодический
Математическое ожидание - наивероятнейшее значение ожидаемой величины.
Дисперсия – отклонение значения случайной величины от математического ожидания
Корреляция – взаимная корреляция – поверхностная взаимосвязь между несколькими
случайными величинами
Автокорреляция – вероятностная взаимосвязь между несколькими значениями случайной величины
Корреляционная функция – показывает изменение вероятностной взаимосвязи между несколькими случайными величинами во времени
Спектральная плотность погрешности измерений – разброс дисперсии погрешности измерений по всему спектру частот.
Эргодический процесс – не стационарный процесс
Случайной функцией называется функция, которая при всех или некоторых значениях аргументов является случайной величиной.
В ТАУ (теория автоматизации управления) как правило используют случайные функции одного аргумента – времени.
§ 1.3 Обработка результатов измерений.
Получение алгоритма автоматической обработки результатов измерений возможно при решении следующих задач:
- определение теоретического закона распределения случайных погрешностей измерений
- проверка правдоподобия найденной теоретической закономерности опытным данным
- определение числовых характеристик (ожидание корреляция) случайных погрешностей измерений, оценка их точности и надежности.
Оценки полученные в результате статистической обработки результатов измерений должны обладать следующими качествами:
- несмещенность оценки
 , где х – значение случайной величины,
, где х – значение случайной величины,  - оценка значения случайной величины. Несмещенность оценки – равенство математического ожидания оценки измеряемому параметру
- оценка значения случайной величины. Несмещенность оценки – равенство математического ожидания оценки измеряемому параметру - эффективность оценки – т.е. должен быть обеспечен минимум среднего квадрата ошибки данной оценки
 , где
, где  - рассматриваемая оценка,
- рассматриваемая оценка,  - любая другая оценка, х – значение случайной величины
- любая другая оценка, х – значение случайной величины - Состоятельность оценки
 , т.е. сходимость по вероятности при
, т.е. сходимость по вероятности при  к оцениваемому параметру. Где
к оцениваемому параметру. Где  - любая на перёд заданная величина
- любая на перёд заданная величина
С учётом рассмотренных особенностей и требований, оценку значения случайной погрешности измерений (распределенных по нормальному закону) можно определить по следующей формуле:
1.  - статистическое математическое ожидание (среднее значение)
- статистическое математическое ожидание (среднее значение)
2.  - дисперсия
- дисперсия
3.  - автокорреляция (
- автокорреляция (  )
)
4.  - взаимная корреляция
- взаимная корреляция
§ 1.4 Метод компенсаций погрешности измерений. Фильтр Калмана.
Для снижения влияния погрешности измерений в измерительное устройство вводят математические модели динамики судна и математические модели случайных погрешностей измерений. Для большинства приложений в технике приходится иметь дело со стационарными случайными процессами. Закон распределения составляющих этих процессов может считаться нормальным, - спектральная плотность погрешности достаточно хорошо апроксимируется дробно-рациональной функцией.
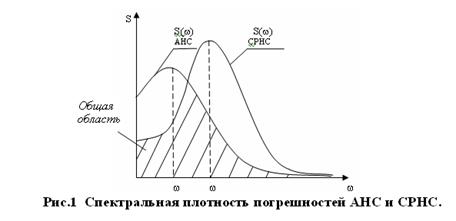
Характер погрешности измеренного параметра по различным системам различен. Повысить точность и надёжность ОМС можно за счёт совместного использования нескольких измерительных систем:
- автономная навигационная система
- спутниковая сетевая РНС
 - автономная система
- автономная система
 - СРНС
- СРНС
Погрешности СРНС имеют хорошую долговременную стабильность параметра на воздействие широкополосных помех.
Погрешности АНС обладают хорошей кратковременной стабильностью.
В связи с тем, что различные навигационные системы имеют различные частотные характеристики погрешностей то имеется возможность их разделения и выделения, т.е. фильтрация.
Рассмотрим в качестве примера схему компенсаций погрешностей измерений с помощью фильтра Калмана :


На выходе фильтра в результате фильтрации получаем  - не верно
- не верно
 !!!
!!!
В результате использования фильтра Калмана, результирующая погрешность алгоритма компенсации определяется только погрешностью работы фильтра Калмана.
Для повышения точности работы алгоритма компенсации, необходимо повышать точность математической модели погрешности измерений.
Особенности решения навигационной задачи с использованием вероятностных алгоритмов обработки результатов измерений.
Основное содержание заключается в определении координат и скоростей объекта являющихся основой их векторосостояния.
 - географическая система координат низкоскоростных объектов.
- географическая система координат низкоскоростных объектов.
 - для высокоскоростных объектов
- для высокоскоростных объектов
Для нахождения данных величин, используют алгоритмы, которые отличаются ходом вычислительного процесса. На практике используются итерационные алгоритмы. В основу метода статистического оценивания могут быть положены следующие критерии качества оптимизации:
- минимум дисперсии ошибок оценки вектора состояния
- минимум суммы модуля невязок
- максимум функций правдоподобия
- максимум плотности апостериорной вероятности
Уравнение измерений в вероятностном алгоритме может быть представлено в виде разностных матрично-векторных уравнений
 , где
, где
Х – вектор состояния
Ф – фундаментальная матрица (математическая модель движения объекта)
Г - матрица коэффициентов погрешностей измерений
Н – матрица коэффициентов проекций градиентов навигационных параметров
 - вектор шумов измерений
- вектор шумов измерений
W – вектор шумов системы (воздействие окружающей среды)
Z – вектор значений измерений
Первое уравнение системы описывает динамику движения объекта. Второе уравнение системы описывает динамику погрешностей измерений.
Окончательно, алгоритм фильтрации методом Калмана имеет вид:
 , где
, где
 - коэффициент усиления фильтра
- коэффициент усиления фильтра
 - ковариационная матрица погрешностей оценки навигационного сеанса
- ковариационная матрица погрешностей оценки навигационного сеанса
Собственное значение матрицы Р определяют полуоси эллипса погрешностей. А собственные вектора матрицы определяют направление этих полуосей. Таким образом с использованием фильтра Калмана имеется возможность на каждый конкретный момент времени определять эллипс погрешности навигационного сеанса. Имеется возможность автоматически подстраивать работу фильтра через его коэффициент усиления к текущим условиям плавания. Это дает возможность создания автоматических адоптивных систем управлением движения судна.
ГЛАВА 2
Теория автоматического управления.
§ 2.1 Общие понятия и определения.
Автоматическое управление – совокупность воздействий, направленных на осуществление функционирования объекта управления в соответствии с имеемой программой или целью управления и выполнения с помощью автоматических управляющих устройств.
Объект управления – устройства, агрегаты, отдельные механизмы (двигатели, генераторы), а также целые производственные комплексы (суда, самолеты и т.д.), которые осуществляют активное воздействие на окружающую среду.
Автоматическое управляющее устройство – специальное техническое устройство, осуществляющее целенаправленное воздействие на режим работы объектов управления посредством специальных входов объекта.
12.10.2006 Лекция 5
§ 2.2 Виды автоматического управления

ОУ – объект управления
x(t)- задающее воздействие
f(t)- возмущающее воздействие
y(t)- регулируемая величина
Рассмотрим основные виды автоматического управления:
1. Автоматическое управление с разомкнутой цепью воздействий (жесткое управление).
2. Автоматическое регулирование.
3. Автоматическая настройка
Рассмотрим жесткое управление

УУ- устройство управления.
U(t)- управляющее воздействие.
1. Первый вид управления характеризуется функциями управления, которые не ставятся в зависимость от действующего хода процесса управления и выполняется по разомкнутому циклу.
Из-за возмущающих воздействий f(t) действительное значение регулируемой величины y(t) отличается от желаемого и это отличие может быть достаточно велико.
2. Второй вид - автоматическое регулирование, характеризуется тем, что управляющее воздействие U(t) формируется с учетом действительного хода процесса с использованием устройств обратной связи.


3.Третий вид – автоматическая настройка, характеризуется функциями управления, которые автоматически приводят систему к наилучшему, в каком-либо смысле, режиму работы. Операция настройки заключается в непрерывном измерении параметров системы с целью получения оптимального режима.

 - параметр объекта управления (крен, дифферент)
- параметр объекта управления (крен, дифферент)
 -дополнительное устройство управления
-дополнительное устройство управления
вырабатывает дополнительное воздействие, которое подстраивает систему управления к текущим условиям плавания автоматически (т.е. без участия человека) Например: адоптивный авторулевой.
§2.3 Классификация систем автоматического управления.
1. Цель управления.
2. Характер информации об управляемом процессе или системе.
3. Способ управления.
4. Принцип формирования сигналов в системе.
5. Характер зависимости выходных сигналов от входных.

Все САУ по цели управления делятся на:
1. Системы для получения заданного закона изменения управляемой величиной.
2. Системы для получения оптимального показателя качества.
По характеру информации об управляемом процессе системы делятся на:
3. Системы с полной априорной информацией.
4. Системы с неполной априорной информацией.
По способу управления:
5. Разомкнутые системы.
6. Замкнутые системы.
По принципу формирования сигнала в системе:
7. Непрерывные системы.
8. Дискретные системы.


Точность цифровой информации зависит от дискрета времени, чем меньше Δt, тем точнее информация.
По характеру зависимости выходных от входных сигналов:
9. Линейные системы.
10. Нелинейные системы.
§2.4 Системы стабилизации
Предназначены для поддержания постоянства регулируемой величины, при этом задающее воздействие остается постоянное.
Для данной системы закон управления следующим
Xзад(t)= const
Yтек(t)= const
Рассмотрим систему автоматического поддержания заданной угловой скорости вращения вала двигателя, питаемого от электромагнитного усилителя настроенная по принципу регулирования по отклонению.

ОУ- обмотка управления электромагнитного усилителя
ЭМ- электромагнитный усилитель
Д- двигатель
Тх- тахометр
РМ- рабочий механизм
U0-питающее напряжение
E- ЭДС электромагнитного усилителя
ω- частота вращения вала двигателя
етх- ЭДС тахометра

§2.5Система программного управления
Система программного управления служит для измерения регулируемой величины во времени по определенному закону, который называется программа
Закон управления: xзад(t)=f(t)
Рассмотрим микропроцессорную систему автоматического поддержания заданной температуры в грузовом танке.
Логический «0» представлен напряжением в пределах от 0В до 0,5В.
Логическая «1» представлена напряжением в пределах от 4,5В до 5,5В.
1 байт:
1 байт – одна ячейка памяти
§2.6 Основные показатели работы САУ.

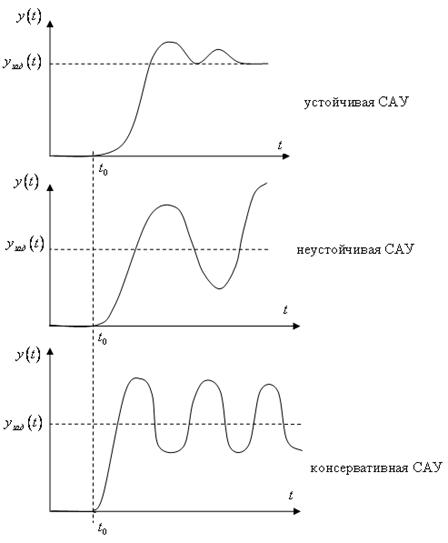
ПП – переходный процесс
Исходя из вида переходных процессов, все САУ делятся:
1 Устойчивые САУ- при изменении входных сигналов, регулируемая величина переходит в новое заданное состояние и поддерживается сколь угодно долго.
2 Неустойчивые САУ- вызывают изменение регулируемой величины во времени без ее стабилизации.
3 Консервативные СА- система находится на грани устойчивости.
В зависимости от заданного режима САУ должна обеспечивать требуемое количество работы в переходных режимах вызванных изменением задающего параметра x(t) или возмущающего f(t)
Качество регулирования оцениваются следующими основными показателями:

1 Величина перерегулирования- отношение а1 к а2 определяет величину перерегулирования
а1 > а2 – затухающий процесс (чем больше разница, тем больше коэффициент затухания).
а1 < а2 -расходящийся процесс, САУ неустойчивая.
а1 = а2 автоколебательный процесс, коэффициент затухания равен нулю.
02.11.2006 Лекция 7
2 Время переходного процесса tпп чем меньше этот промежуток, тем быстрее осуществляется реакция системы на изменение входных сигналов.
Длительность переходных процессов определяется зоной статической ошибки-

k-коэффициент усиления САУ
3 Быстродействие системы- определяется промежутком времени от начала действия входного сигнала до момента первого пересечения линии yуст , определяет чувствительность системы
4 Собственная частота колебаний системы

Т- постоянная времени судна
§2.7 Задачи линейной теории автоматического управления.
1 Изучение динамических свойств и характеристик различных звеньев автоматических систем любой физической природы
2 Формирование функциональных и структурных схем САУ
3 Построение динамических характеристик САУ
4 Определение показателей точности и ошибок САУ
5 Исследование устойчивости САУ
6 Оценка качественных показателей процесса управления
7 Изучение различных видов корректирующих устройств вводимых в САУ для повышения точности и улучшения динамических свойств.
§2.8 Математический аппарат исследования САУ.
Для исследования динамических свойств САУ используют следующие типовые сигналы:
1 Ступенчатый
2 Импульсный
3 Гармонический
4 Линейно- нарастающий
5 Прямоугольный.
Ступенчатый сигнал наиболее простой- функция времени, которая в момент времени  и достигает значения
и достигает значения  и далее остается постоянным
и далее остается постоянным


1(t)-единичная функция времени
Импульсный сигнал- предел прямоугольного импульса высотой h и длительностью Δt при  и
и 

Площадь импульса определяется  , при этом сигнал представляет собой производную от ступенчатого сигнала и описывается по формуле:
, при этом сигнал представляет собой производную от ступенчатого сигнала и описывается по формуле:

 - функция Дирана
- функция Дирана
Гармонический сигнал


Линейно-нарастающий


Прямоугольный импульс (то же что и ступенчатый, только заканчивается ).

Динамические характеристики отображают переходные процессы в системе при различных формах воздействия и определяются с использованием соответствующих сигналов:
1 Ступенчатый сигнал- для получения переходной характеристики
2 Импульсный сигнал - для получения весовой характеристики
3 Гармонический сигнал- при исследовании частотных свойств сигнала
4 Линейно-нарастающий – при исследовании динамики следящих систем
Прямоугольный сигнал – при построении комплексной характеристики САУ
§2.9 Уравнения динамики САУ и их решение.
Исследование переходных процессов САУ основывается на использовании дифференциальных уравнений при изучении динамических процессов САУ. При этом отвлекаются от конкретной физической природы процессов, а используют лишь их математическую модель.
В основе построения математической модели лежит ее структурная схема, состоящая из типовых математических звеньев.
В свою очередь каждое типовое динамическое звено описывается дифференциальными или операторными уравнениями, которые описывают физическую природу происходящих в них процессах.

Процесс дифференцирования Лаплас предложил заменить функцией  - оператор Лапласа, а процесс интегрирования на
- оператор Лапласа, а процесс интегрирования на  , получил:
, получил:

Одно конкретное устройство САУ (электродвигатель, реле, трансформатор) описывается одним дифференциальным уравнением.
Совокупность нескольких дифференциальных уравнений динамических звеньев представляет собой математическую модель всей системы и служит для получения общего характеристического уравнения системы в целом.
Аналитические методы расчета основаны на использовании классических или операторных методах:
1 Классическое вариационное исчисление
2 Принцип максимума Л.С.Понтрягина
3 Метод динамического программирования Р.Беллмана.
§2.10 Динамические звенья.
САУ любой сложности может быть представлена из совокупности типовых динамических звеньев.
Различат несколько десятков типовых динамических звеньев, основные из них следующие :
1 Без инерционное (усилительное) звено
2 Идеальное интегрирующее звено
3 Идеальное дифференцирующее звено
4 Апериодическое 1-го и 2-го порядка звено
5 Колебательное звено
6 Реальное интегрирующее звено
Каждое типовое динамическое звено описывается своими собственными характеристикам:
1 Передаточная функция звена

Показывает отношение операторного изображения выходной величины к операторному изображению входной величины
2 Переходная характеристика y(t)-показывает качество переходного процесса
3 Весовая функция h(t)-показывает реакцию звена на единичное импульсное воздействие.
4 Амплитудно-частотная характеристик А(ω)- показывает зависимость амплитуды выходного сигнала от частоты входного
5 Фазо-частотная характеристика φ(ω)- показывает зависимость фазы выходного сигнала от частоты входного.
6 Комплексная характеристика  - показывает границы и запас устойчивости работы звена.
- показывает границы и запас устойчивости работы звена.
Лекция 8
Существует несколько десятков типовых динамических звеньев. Рассмотрим характеристики типовых динамических звеньев:
I. Безинерционное (усилительное) звено

 , где
, где  - коэффициент усиления
- коэффициент усиления
- Передаточная функция звена

2. Переходная характеристика
Для исследования переходной характеристики используется ступенчатый сигнал.

3. Весовая характеристика

Весовая характеристика показывает отсутствие реакции на единичное импульсное воздействие (обладает нулевой инерционностью)
4. Амплитудно-частотная характеристика
Данное звено обладает нулевой инерционностью.

 , где
, где
 - действительная часть
- действительная часть
 - мнимая часть характеристики
- мнимая часть характеристики

Амплитудно-частотная характеристика показывает, что амплитуда выходного сигнала постоянна для всего диапазона частот и определяется коэффициентом усиления. Данное звено не вносит никаких изменений в форму сигнала.
5. Фазо-частотная характеристика


Фазо-частотная характеристика показывает что для выходного сигнала отсутствует фазовый сдвиг для всего диапазона частот.
6. Комплексная характеристика


Данное звено обладает неограниченным запасом устойчивости по амплитуде входного сигнала. Примеры безинерционного усилительного звена: выключатель, реле, трансформатор.
|
из
5.00
|
Обсуждение в статье: I. Безинерционное (усилительное) звено |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы