 |
Главная |


ФУНКЦИОНАЛЬНАЯ И СТРУКТУРНАЯ СХЕМЫ СИСТЕМЫ
|
из
5.00
|
ТЕХНИЧЕСКОЕ ЗАДАНИЕ
1 Настоящее техническое задание распространяется на разработку и испытание подсистемы автоматического регулирования угла поворота вала электродвигателя.
2 Основанием для разработки является рабочий план курса «Проектирование систем автоматического управления».
3 Технические требования
3.1 Состав системы и требования к конструктивному устройству
3.1.1 Основные части и их назначение:
Датчики (2 шт.) – преобразование угла поворота в электрическое напряжение;
Усилитель напряжения (1 шт.) – формирование ошибки регулирования;
Усилитель мощности (1 шт.) – усиление мощности сигнала, поступающего на двигатель;
Электродвигатель (1 шт.) – исполнительное устройство.
3.1.2 Габариты не должны превосходить размеров 300х200х400 (мм).
3.1.3 Масса не должна превосходить 20 (кг).
3.2 Требуемые показатели качества и точности
Ошибка воспроизведения полиномиального сигнала |e¥(t)|  0.06;
0.06;
Ошибка воспроизведения гармонического сигнала |eS| 0.06;
Ошибка от помехи |eN| 0.5;
Минимальная частота помехи  = 310 (рад/c);
= 310 (рад/c);
Время регулирования tР 2 (с);
Перерегулирование системы s 15%.
3.3 Номинальный режим работы
Момент инерции нагрузки  = 0.5 (кг×м2);
= 0.5 (кг×м2);
Максимальная скорость вращения  (рад/с);
(рад/с);
Максимальное значения ускорения движения нагрузки  (рад/с2);
(рад/с2);
Максимальный статический момент сопротивления нагрузки  (Н×м); Требования к надежности
(Н×м); Требования к надежности
Средний срок безотказной работы 10000 часов.
Возможность устранения неполадок, заменой основных частей и их элементов.
Условия эксплуатации
3.5.1 допускаемые кратковременные воздействия климатических факторов
Рабочий диапазон температур 00 С < t < 400 C;
Максимальное атмосферное давление 900 (мм рт. ст.);
Относительная влажность – 80% при температуре окружающей среды 200 C;
Механические воздействия
Постоянная перегрузка не более 10g;
Переменные перегрузки не более 5g;
Частота вибрации 2 Гц.
Затраты на проектирование неограниченны. Источники финансирования не определены.
Порядок испытаний и ввода в действие
5.1 Провести проверку и контроль параметров
Осуществить контроль сопротивлений и электрической прочности изоляции токоведущих цепей и обмоток электродвигателя;
Осуществить контроль нагрева обмоток или других частей электродвигателя;
Осуществить оценку возникающих при работе машин шумов и вибраций, а также радиопомех.
Осуществить проверку точности отработки заданного угла поворота
Провести ряд испытаний с измерением угла поворота j;
Убедиться в соответствии угла поворота j и заданного угла jЗАД.
Министерство образования и науки Украины
Севастопольский Национальный Технический Университет
Кафедра Технической кибернетики
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
к курсовому проекту
по курсу «Проектирование систем автоматического управления»
«Проектирование системы автоматического регулирования угла поворота вала электродвигателя»
Выполнила: ст. гр. А – 61з
Брусинов С. Э.
Проверил:
Дубовик С.А.
Оценка ________________
Дата «____»___________
Подпись _______________
Севастополь
2009
СОДЕРЖАНИЕ
ВВЕДЕНИЕ
1 ФУНКЦИОНАЛЬНАЯ И СТРУКТУРНАЯ СХЕМЫ СИСТЕМЫ
2 ВЫБОР И РАСЧЕТ ИСПОЛНИТЕЛЬНОГО УСТРОЙСТВА
2.1 Выбор двигателя
2.2 Расчет параметров передаточной функции двигателя
3 РАСЧЕТ РЕГУЛЯТОРА
4 РАСЧЕТ КОРРЕКТИРУЮЩЕГО ЗВЕНА
4.1 Получение характеристик желаемой ЛАЧХ
4.2 Построение амплитудно-частотных характеристик
4.3 Нахождение передаточной функции регулятора
4.4 Проверка устойчивости и качеств переходного процесса
5 РЕАЛИЗАЦИЯ КОРРЕКТИРУЮЩЕГО УСТРОЙСТВА
ЗАКЛЮЧЕНИЕ
Список используемых источников
ВВЕДЕНИЕ
Системы автоматического регулирования применяются во многих областях современной техники: в авиационной и космической промышленности, для работы в подводных и морских средах, в наземной технике.
Синтез системы автоматического регулирования состоит в выборе структуры и параметров систем регулирования объектами, которые в соответствии с заданными техническими условиями обеспечивают наиболее рациональные характеристики по запасам устойчивости, показателям качества и точности. Сложности решения данной проблемы заключается в том, что при проектировании систем необходимо учитывать множество дополнительных факторов: надёжность функционирования, массу и габаритные размеры, стоимость, возможность работы при вибрации, в агрессивных средах, при значительных перепадах температуры и влажности.
Проектирование представляет собой процесс создания технической документации, опытных образцов и моделей объекта.
Существуют особенности САУ как объектов проектирования. В отличие от других объектов машиностроения и приборостроения, являющимися обычно отдельными устройствами, САУ представляет собой систему из устройств, работающих в режиме управления заданным объектом: объект управления (регулирования), регулятор, или управляющая часть, поддерживает требуемый режим работы объекта управления либо изменяет этот режим в соответствии с заданным законом или программой управления.
При этом большой вес приобретают такие проектные процедуры, как анализ устойчивости, качества и точности САУ, синтез регулятора, построение математических моделей объектов регулирования. При проектировании САУ существенное значение приобретает физическая разнородность и возмущающих воздействий.
Цели и критерии проектирования имеют исключительно важное значение, так как они определяют и направляют весь процесс проектирования. Срок проектирования устанавливается с учетом наискорейшего достижения цели создания САУ на мировом уровне.
В ходе выполнения курсовой работы нужно спроектировать систему автоматического регулирования угла поворота вала электродвигателя (ЭД). Объектом управления такой системы является вращающийся вал, нагруженный моментом  . Цель управления состоит в обеспечении угла
. Цель управления состоит в обеспечении угла  поворота вала ЭД, близкого к заданной величине
поворота вала ЭД, близкого к заданной величине  , которая может изменяться во времени. Для достижения этой цели необходимо спроектировать систему с обратной связью.
, которая может изменяться во времени. Для достижения этой цели необходимо спроектировать систему с обратной связью.
Оценки качества и точности проектируемой системы должны удовлетворять техническому заданию.
ФУНКЦИОНАЛЬНАЯ И СТРУКТУРНАЯ СХЕМЫ СИСТЕМЫ
Первый этап проектирования состоит в выборе элементов этой системы и формировании функциональной схемы.
В курсовом проекте угол поворота вала ЭД должен измеряться с помощью датчика (Д) одного из следующих типов:
потенциометрические;
индукционные (сельсины, вращающиеся трансформаторы, следящие трансформаторы магнесины);
емкостные;
фотоэлектрические.
Назначение этих датчиков состоит в преобразовании угла поворота вала в электрическое напряжение U. Усилитель напряжения (УН) суммирует этот сигнал с заданным  и формирует ошибку регулирования
и формирует ошибку регулирования  . Она усиливается по мощности с помощью усилителя УМ и подается на исполнительный двигатель. Соответствующая функциональная схема приведена на рисунке 1.1.
. Она усиливается по мощности с помощью усилителя УМ и подается на исполнительный двигатель. Соответствующая функциональная схема приведена на рисунке 1.1.
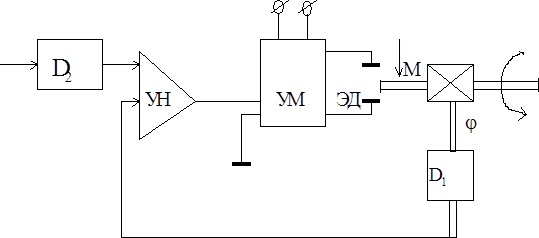
Рисунок 1.1 – Функциональная схема электродвигателя
Электродвигатель как четырехполюсник характеризуется двумя входными параметрами:  - напряжение в цепи якоря и
- напряжение в цепи якоря и  - ток якоря и двумя выходными: М - момент вращения, W- угловая скорость вала. Эти характеристики связывают два уравнения четырехполюсника
- ток якоря и двумя выходными: М - момент вращения, W- угловая скорость вала. Эти характеристики связывают два уравнения четырехполюсника
 (1.1)
(1.1)
где частные передаточные функции имеют вид
 (1.2)
(1.2)
Уравнения (1.1), (1.2) следуют из дифференциальных уравнений двигателя
 (1.3)
(1.3)
где  - индуктивность и сопротивление якорной цепи,
- индуктивность и сопротивление якорной цепи,
 - ток якоря,
- ток якоря,
J - момент инерции якоря и всех жестко соединенных с ним частей,
 - электромагнитный вращающий момент двигателя,
- электромагнитный вращающий момент двигателя,
M - момент сопротивления нагрузки, приведенной к валу двигателя.
Из приведенных уравнений следует структурная схема системы стабилизации, изображенная на рисунке 1.2, где обозначено
Д1, Д2 – датчики;
Ку – коэффициент усиления;
j - угол поворота вала.
Wp(s) – передаточная функция регулятора;
N e - высокочастотные шумы,
 (s) - передаточная функция двигателя по управлению от напряжения U до угловой скорости вращения якоря ,
(s) - передаточная функция двигателя по управлению от напряжения U до угловой скорости вращения якоря ,
 (s)- передаточная функция двигателя по возмущению от момента сопротивления на валу двигателя до угловой скорости вращения якоря .
(s)- передаточная функция двигателя по возмущению от момента сопротивления на валу двигателя до угловой скорости вращения якоря .

Рисунок 1.2 – Структурная схема системы стабилизации
 (1.4)
(1.4)
Параметры этих передаточных функций могут быть определены по характеристикам пускового момента  скорости холостого хода -
скорости холостого хода -  :
:
 (1.5)
(1.5)
Характеристики  и
и  приводятся в справочной литературе [1] или в технической документации.
приводятся в справочной литературе [1] или в технической документации.
Для обеспечения заданных максимальных значений скорости  и ускорения движения нагрузки
и ускорения движения нагрузки  двигатель на валу должен развивать скорость
двигатель на валу должен развивать скорость  и момент
и момент  , определяемые выражениями [2], [3], [4]
, определяемые выражениями [2], [3], [4]
 (1.6)
(1.6)
 , (1.7)
, (1.7)
где  и
и  - моменты инерции двигателя и редуктора;
- моменты инерции двигателя и редуктора;
 - момент инерции нагрузки;
- момент инерции нагрузки;
 -максимальный момент сопротивления нагрузки;
-максимальный момент сопротивления нагрузки;
 - передаточное число редуктора;
- передаточное число редуктора;
 - коэффициент полезного действия редуктора.
- коэффициент полезного действия редуктора.
|
из
5.00
|
Обсуждение в статье: ФУНКЦИОНАЛЬНАЯ И СТРУКТУРНАЯ СХЕМЫ СИСТЕМЫ |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы