 |
Главная |


Проектирование САУ ЭП с заданными показателями качества
|
из
5.00
|
Главное требование к САУ ЭП - обеспечение заданных статических и динамических характеристик, при которых работа ЭП удовлетворяет требования техпроцесса. Основное требование к системе управления - обеспечение допустимого значения ошибки управления e(t) = х(t)-y(t) в установившихся и переходных режимах, что определяется статическими и динамическими характеристиками САУ ЭП.
Статическая характеристика замкнутой СУЭП - зависимость регулируемой переменной от основного возмущающего воздействия f1 при постоянном задающем воздействии X и при отсутствии других возмущающих воздействий. Статическая характеристика может иметь несколько участков разной формы, каждый из которых соответствует определенным структурам и параметрам системы (рис. 6).
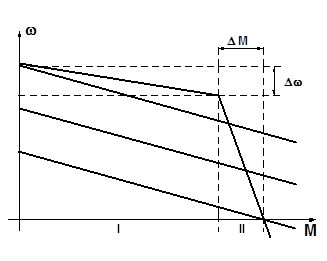
Рис. 6
I- участок стабилизации скорости, CУ с отрицательной обратной связью по скорости.
II- участок стабилизации момента, СУ с О.О.С. по моменту сопротивления.
Данная статическая характеристика имеет два участка I и II, каждому из которых соответствует определенная структура СУЭП.
Статизм системы определяет точность работы системы в установившемся режиме.
 , где
, где
 - статизм, обусловленный задающим воздействием,
- статизм, обусловленный задающим воздействием,
 - статизм, обусловленный возмущающим воздействием,
- статизм, обусловленный возмущающим воздействием,
X- заданное значение установившейся регулируемой величины,
Y1- установившееся значение регулируемой величины, соответствующее возмущающему воздействию f1,
Yо- установившееся значение регулируемой величины при f1=0.
Определим, как зависит величина Sx и Sf от параметра К - коэффициент передачи системы.
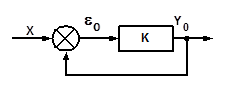
Рис.7
f1 = 0; eо = Х-Yo; 


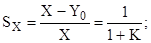
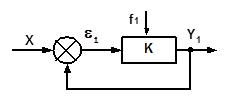
Рис. 8
f1 ¹ 0; e1 = X- Y1 ; 

учитывая, что Y01 = Y1 + Y1Р, определим:

тогда:
 где
где
Рис. 9
DY1- падение значения регулируемой переменной в замкнутой системе под действием возмущения f1 (Рис. 9);
DY1Р- падение регулируемой переменой в разомкнутой системе при действии f1;
Yo- значение регулируемой переменной при f1=0 по характеристике замкнутой системы;
Y01- значение регулируемой переменной при f1=0 по характеристике разомкнутой системы, проходящей через точку (Y1;f1) характеристики.
Следовательно: величины Sx и Sf обратно пропорциональны величине К, а Sf, кроме этого, зависит от величины задания Х, т.е. максимален на нижнем диапазоне регулирования при Х=Хmin.
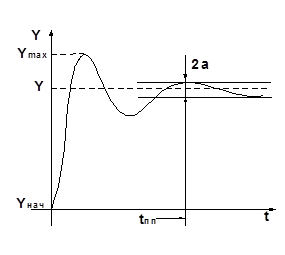
Рис. 10
Динамическая характеристика замкнутой СУЭП отражает поведение системы в переходном процессе (п/п) пуска, торможения, регулирования скорости, наброса и сброса нагрузки, т.е. при изменении задающего или возмущающего воздействия. При исследовании системы применяют воздействие в виде скачка: x(t) = X |(t) и f1(t) = F1|(t), где |(t)- единичная ступенчатая функция.
Прямые показатели качества:
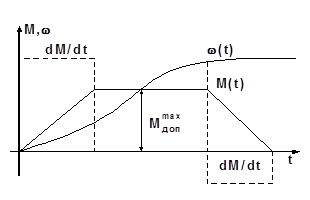
Рис 11
Быстродействие- продолжительность п/п, т.е. длительность tп/п до условно установившегося значения регулируемой переменной, когда ее отклонение не превышает a (3 ¸ 5% от установившегося значения) т.е.
(Y(t)- Y)/(Y- Yнач) £ a.
От быстродействия зависят: динамическая ошибка в системе стабилизации при набросе нагрузки, точность в системах следящих и программного управления. Быстродействие системы ограничивается перегрузочной способностью двигателя, di/dt, допустимым ускорением механизма.
Перерегулирование  - отклонение величины max превышения регулируемого параметра над установившемся значением к величине приращения ее установившейся величины. Обычно tдоп. £ 18 ¸ 30%, иногда tдоп.= 0 (привода подачи станков).
- отклонение величины max превышения регулируемого параметра над установившемся значением к величине приращения ее установившейся величины. Обычно tдоп. £ 18 ¸ 30%, иногда tдоп.= 0 (привода подачи станков).
Число колебаний регулируемой величины за время tп/п- определяет демпфирование колебаний в системе. Обычно число колебаний не более трех для избежания резонанса в ЭП.
Для систем, работающих в режиме пуска торможения, оптимальным по быстродействию будет трапецеидальный график изменения крутящего момента ЭД (при Мс = 0). Время переходного процесса будет минимально, если п/п будет происходить при :
Мmax = Мmaxдоп;
dМ/dt = мах доп., соответствует eдоп. (рис. );
Мmaxдоп и eдоп (допустимое ускорение) определяются перегрузочной способностью двигателя, механизма передачи, технологическими характеристиками.
Формирование требуемых переходных процессов производится за счет линейных законов изменения или формирования сложных зависимостей задания Х(t) для нескольких контуров регулирования.
Проектирование СУЭП с заданными показателями качества невозможно без анализа и исследования модели САУЭП. Моделью может быть реальное техническое устройство и абстрактное математическое описание, т.е. различают моделирование физическое и математическое. В основу физического моделирования положено изучение процессов на моделях одной физической природы с оригиналом. Математическое моделирование основано на тождественности дифференциальных уравнений, описывающих процессы в оригинале и функциональные зависимости между выходными величинами на модели. Математическое моделирование позволяет прогнозировать динамические характеристики реальной системы при свойственных ей внешних воздействиях, определить показатели качества системы и их соответствие заданию. Математическое моделирование реализуют на ЭВМ. Машинное моделирование наиболее широко применяется в форме структурного моделирования.
Математическая модель при структурном моделировании представляет собой систему дифференциальных уравнений, каждое из которых представляет элементы САУЭП: преобразователь, якорную цепь двигателя и его механическую часть, регуляторы, цепи обратных связей и другое. Составлять математическую модель удобно на основании структурной схемы для исследования динамики СУЭП. При составлении дифференциального уравнении, описывающего звено ЭП, учитываются его статические и динамические характеристики: коэффициент передачи звена, постоянные времени.
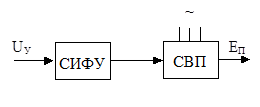
Рис. 12
Тиристорный преобразователь в динамике представляет сложное нелинейное звено, что связано с его неполной управляемостью. Частота управления ограничена
wк = mwo/2,
где
wо = 2pfс; fс = 50 Гц; m- число фаз. (рис. 12).
СИФУ - система импульсно-фазового управления тиристорами;
СВП - собственно вентильный преобразователь.
При безинерционном СИФУ передаточная функция ТП,
Wтп=Dе(Р)/DUу(Р)=Кпе-tр- импульсное звено чистого запаздывания; где
t- среднестатическое запаздывание: t=1/Рпfc;
Рп- число пульсаций за период;
fс- частота сети.
Импульсное звено чистого запаздывания аппроксимируется апериодическим звеном:
где 
Если на входе СИФУ находится фильтр (апериодическое звено) для уменьшения помех с постоянной времени Тф, передаточная функция ТП примет вид: 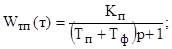
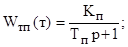
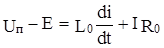
Дифференциальное уравнение, описывающее зависимость между Еп и Uу ТП:
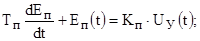
Кп- статический коэффициент передачи ТП. В зависимости от вида опорного напряжения СИФУ Кп может быть постоянной или переменной величиной. (рис. 13).
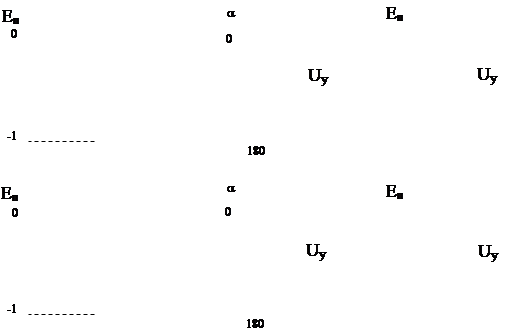
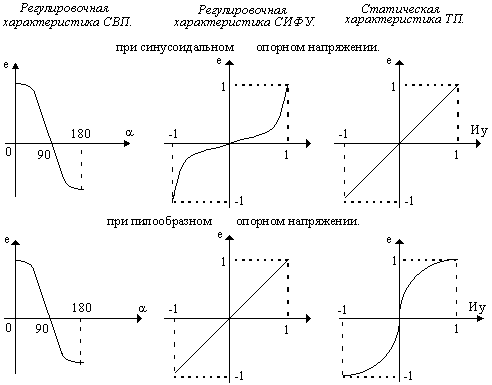
Рис. 13
При синусоидальном опорном напряжении статическая характеристика ТП линейная, т.е. Кп = const. При пилообразном опорном напряжении статическая характеристика нелинейна. Такой ТП моделировать сложнее. Внутренне сопротивление и индуктивность силовой цепи ТП учитываются в эквивалентных параметрах якорной цепи двигателя, питаемого от ТП.
В оптимизированных замкнутых системах Тп принимают за некомпенсированную постоянную времени Тm=Тп=(3¸20) мс.
Генератор постоянного тока
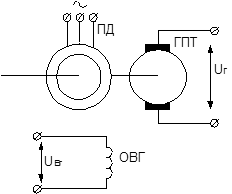
ПД-приводной двигатель;
ГПТ-генератор постоянного тока;
ОВГ-обмотка возбуждения генератора;
Uг-напряжение на зажимах генератора;
Uвг-напряжение ОВГ.
Передаточная функция, описывающая генератор постоянного тока:
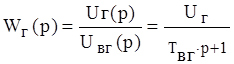 ,
,
где Uг - коэффициент усиления генератора: 
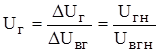 ;
;
Uгн-номинальное напряжение;
Tвг - постоянная времени ОВГ,
 ;
;
Rвг,Lвг - сопротивление и индуктивность ОВГ.
В случае использования генераторов с несколькими обмотками его постоянная времени:
Tвгi - постоянная времени i-ой обмотки.
Аналогично рассматриваются параметры других звеньев СУЭП.
Cтруктурное представление ЭП постоянного тока. Передаточные функции по управляющему и возмущающему воздействию.
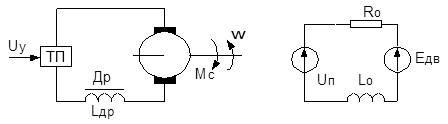
Рис. 14
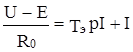
Считая, что ТП-безинерционный элемент  , система уравнений, описывающая ЭП имеет вид:
, система уравнений, описывающая ЭП имеет вид:
 ,
,
 .
.
Коэффициенты передачи по ЭДС и моменту в системе СИ одинаковы, поэтому будем их обозначать как –КФ
 ,
,  .
.
Запишем уравнения в операторной форме
 ,
,
 ,
,
где  .
.
Выразим из 1-го уравнения ток ,а из 2-го -скорость, разделим 1-е уравнение на  и обозначим:
и обозначим:
 ,
,  ,
,
тогда
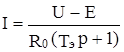 ,
,
 .
.
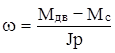
Получим передаточные функции между напряжением и током и между моментом и скоростью.
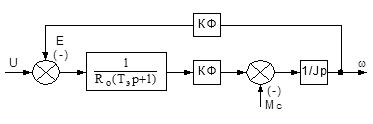
Рис. 15
Рассмотрим передаточную функцию всей системы по управляющему воздействию

 =
=  .
.
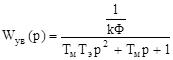 ,
,
 - коэффициент передачи ЭП по управляющему воздействию .
- коэффициент передачи ЭП по управляющему воздействию .
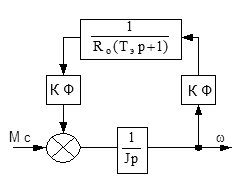
Рис. 16
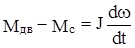
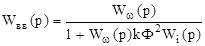
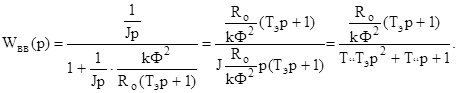
Рассмотрим передаточную функцию по возмущающему воздействию
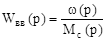
при Uп = 0
Характер переходного процесса по управляющему воздействию определяется корнями характеристического уравнения
ТмТэp2+Tмp+1=0.
- корни уравнения будут вещественными отрицательными при Тм<4Tэ- апериодический характер ПП;
- корни комплексные сопряженные при  -колебательный характер ПП.
-колебательный характер ПП.
Числитель передаточной функции по возмущающему воздействию представляет собой параллельно включенное дифференциально-пропорциональное звено. Наличие дифференциальной составляющей повышает динамичность ПП.
С учетом Wув(p) и Wвв(p) структурная схема ЭП может быть представлена в виде
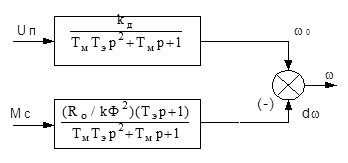
Рис. 17
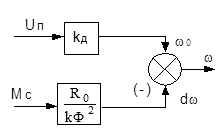
Рис. 18
Или в статике при р=0
т.е. 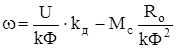 . уравнение механической характеристики.
. уравнение механической характеристики.
Методы исследования устойчивости.
Создание замкнутых систем требует решения следующих задач:
1.Определение факта динамической и запаса устойчивости.
2.Синтез корректирующих устройств, т.е. придание систем заданных динамических показателей.
Алгебраические методы.
Введение ОС изменяет структуру системы, оказывая влияние на ее устойчивость и характер переходного процесса по сравнению с разомкнутой системой.
Передаточная функция разомкнутой системы в общем виде может быть представлена

Динамические характеристики замкнутой системы зависят от порядка характеристического полинома Р(р) .
Например, для инерционного звена охваченного отрицательной обратной связью увеличивается свободный член в полиноме знаменателя
 ,
,  .
.
Для звена охваченного положительной обратной связью
 .
.
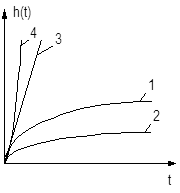
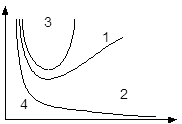
Рис. 19
C увеличением kc уменьшается коэффициент усиления замкнутой системы.
Кривая 1 пройдет ниже-2.
В зависимости от kkc возможны три случая :
1. kkc<1.Передаточная функция соответствует апериодическому звену.
2. kkc=1. Передаточная функция соответствует интегрирующему звену
 - прямая 3.
- прямая 3.
3. kkc>1. Корень уравнения положительный. Система неустойчива-4.
Разомкнутая САУ с характеристическим полиномом 2-го порядка соответствует колебательному звену. Передаточная функция замкнутой системы также колебательное звено. Корни уравнения:
 ;
;  .
.
-разомкнутая
 ;
;
-замкнутая
 .
.
Из условия для разомкнутой системы получим
 ,
,
для замкнутой
 ,
,
с ростом kkc увеличивается склонность к колебательному процессу.
Однако при любых kkc замкнутая система остается устойчивой, т.к. у обоих корней вещественная часть отрицательная.
Этот метод анализа называется корневым методом.
Критерий Гурвица.
Согласно критерию замкнутая система устойчива если
 ,
,  .
.
Этот критерий позволяет определить факт устойчивости: главный определитель и его диагональные миноры должны быть >0.
3. В системах высоких порядков, при большой Тос могут возникнуть колебания. Это можно исследовать по диаграмме Вышнеградского.
Из характеристического уравнения 3-го порядка определим координаты M,N.
p3+b1p2+b2p+b3=0
 ;
; 
1-монотонный процесс
2-сходящийся колебательный
3-монотонный колебательный
4-неустойчивая область
Частотные методы.
1.Найквиста - позволяет судить об устойчивости замкнутой системы по АФХ разомкнутой. Соответственно передаточная функция разомкнутой системы заменяется p ® jwи строится АФХ на комплексной плоскости. Если АФХ не охватывает точку (-1; j) то замкнутая система устойчива.
2.Михайлова – определяет устойчивость замкнутой системы. Система устойчива, если при увеличении w от Æ до ¥ конец вектора на комплексной плоскости опишет кривую, которая начинается на (+)-й части вещественной оси и последовательно обойдет против часовой стрелки n-квадратов, где n – порядок характеристического уравнения.
3.Метод вещественно-частотной характеристики и ЛАЧХ.
Методы графические и графо-аналитические (методы Башарина и Суворова), методы цифрового и аналового моделирования.
|
из
5.00
|
Обсуждение в статье: Проектирование САУ ЭП с заданными показателями качества |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы