 |
Главная |


Примеры систем автоматического управления.
|
из
5.00
|
При реализации технологических процессов параметры, их характеризующие, должны изменяться по определенным законам (или быть постоянными). Необходимость изменения параметров в соответствии с заданным законом возникает в различных отраслях техники. На схемах (рис. 1.9.) функциональные элементы САУ обозначают прямоугольником с надписью, а сигналы, поступающие на эти элементы, — стрелками.
Параметры физических процессов, определяющие сигналы, содержат информацию. Например, с помощью электрических сигналов в телефонной связи передаются звуки, а на телевидении изображение. Параметры, содержащие информацию, называются информационными. Например, сигналом является электрическое напряжение, информационным параметром — амплитуда этого сигнала.
Аналоговым называется сигнал, информационные параметры которого могут принимать любые значения в заданном числовом интервале a...b (рис. 1.10).
Дискретным называется сигнал, информационные параметры которого принимают только дискретные значения.
|
|
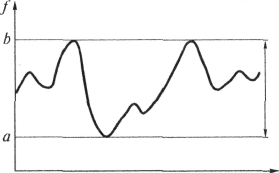
Рис. 1.9 Функциональный элемент САУ Рис. 1.10. Аналоговый сигнал f(t)
Функциональной схемой называется символическое изображение всех функциональных элементов технологического процесса и связей между ними, отражающее последовательность процессов в системе.
Большинство САУ построены по схеме, показанной на рис. 1.11.
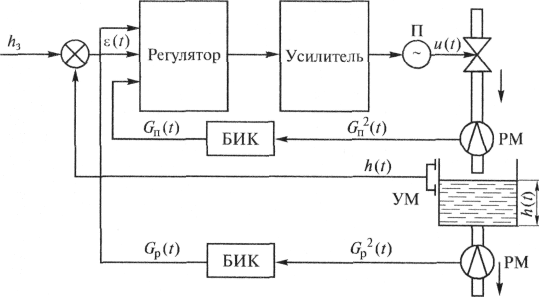
Рис. 1.11. Принципиальная схема системы автоматического регулирования уровня жидкости
Уровень жидкости h(t) зависит от разности двух величин — ее притока Gn и расхода Gp. Если (Gп > Gp,) уровень растет, и, наоборот, при (Gп < Gp) уровень уменьшается.
Приток (GП) можно изменять посредством регулирующего клапана (РК), который управляется электроприводом (П).
Сигнал, соответствующий действительному уровню h(t), измеряется уровнемером (УМ) и сравнивается с заданным уровнем hv
В зависимости от значения и знака сигнала рассогласования ε(t) регулятор посредством электропривода увеличивает (при ε > 0) или уменьшает (при ε < 0) приток жидкости Gn, поддерживая равенство между Сп и Gp при заданном уровне h3.
Изменение расхода Gp нарушает баланс в схеме, т.е. Gp является возмущающим сигналом.
Для повышения точности регулирования наряду с сигналом ε(t) используется сигнал Gn,который обеспечивает местную обратную связь, или так называемое комбинированное регулирование.
Выходной сигнал некоторых расходомеров (РМ) пропорционален квадрату расхода жидкости, поэтому цепи измерения их расходов содержат блоки извлечения корня (БИК).
Воспользовавшись стандартными обозначениями можно записать: y(t) = h, — сигнал на входе системы (заданное воздействие); x(t) = h(t) — сигнал на выходе системы (уровень жидкости); n(t) = Gp(t) — сигнал возмущения (расхода жидкости).
Функциональная схема САУ уровнем жидкости может быть представлена в виде, изображенном на рис. 1.12.
Мы рассмотрели замкнутые системы, в которых имеет место обратная связь, т.е. сравнение входного сигнала (эталона) с выходным (реальным значением регулируемой величины). Кроме того, существуют автоматические системы разомкнутого типа и комбинированные системы.
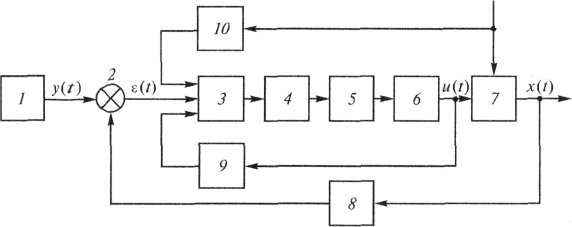
Рис. 1.12. Функциональная схема САУ уровнем жидкости:
1 — задающее устройство; 2 — сравнивающие устройство; 3 — регулятор;
4 — усилитель мощности; 5 — привод; 6 — регулирующий орган (клапан);
7 — объект управления; 8 — уровнеметр; 9, 10 — линейные расходомеры
В разомкнутых системах для выработки управляющего воздействия u(t) (сигнала с выхода регулятора) используется только информация о цели управления y(t), а действительное значение выходной управляемой переменной x(t) не контролируется.
В качестве примера рассмотрим разомкнутую систему автоматического управления числом оборотов электродвигателя постоянного тока, функциональная схема которой представлена на рис. 1.13.
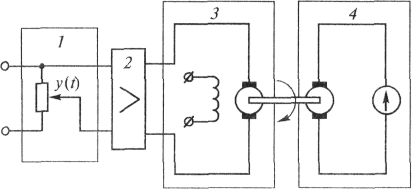
Рис. 1.13. Функциональная схема разомкнутой САУ числом оборотов
электродвигателя:
1 — потенциометр; 2 — усилитель; 3 — электродвигатель;
4 — тахогенератор со стрелочным прибором
При ручном разомкнутом управлении нужное число оборотов двигателя, пропорциональное напряжению на входе усилителя, задается оператором путем перемещения движка потенциометра 1. С выхода потенциометра сигнал поступает на усилитель 2, вызывая изменение тока в якоре электродвигателя и соответственно его угловой скорости, которая измеряется тахогенератором 4 со стрелочным прибором, но не используется для замыкания системы.
Вследствие старения, износа, неточности исполнения элементов и колебаний температуры градуировка системы (в которой каждому положению движка потенциометра должно соответствовать заданное число оборотов двигателя в установившемся режиме) нарушается, поэтому системы, работающие по разомкнутому циклу, часто не могут обеспечить высокое качество работы (высокую точность). Данную систему можно автоматизировать, при этом схема будет функционировать по замкнутому циклу, т.е. по принципу обратной связи и, следовательно, качество ее работы повысится. Функциональная схема такой замкнутой системы представлена на рис. 1.14.
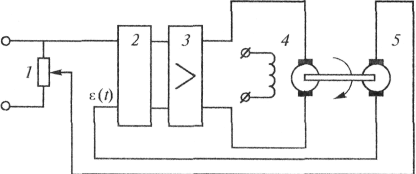
Рис. 1.14. Функциональная схема замкнутой САУ числом оборотов электродвигателя:
1 — потенциометр; 2 — регулятор; 3 — усилитель;
4 — электродвигатель; 5 — тахогенератор
В системе с замкнутым циклом в отличие от разомкнутой системы имеет место сравнение реального числа оборотов двигателя с требуемым. Сигнал рассогласования (ошибки) ε(t) поступает на регулятор 2 и усилитель 3, т.е. управляет системой. Выбор структуры и параметров регулятора 2 должен обеспечить высокую точность работы системы. Замкнутая система не требует точной градуировки: ее точность сохраняется и при «уходе» параметров от эталонных из-за старения элементов или по другим причинам.
В соответствии с определением кибернетики как науки об управлении, передаче и переработке информации САУ являются кибернетическими системами, т. е. для САУ характерны понятия, составляющие основу кибернетики: управление, информация, система. Элементы САУ связаны между собой информационными каналами и линиями управления.
Отметим важное свойство САУ: они обладают свойствами и выполняют функции, которые существенно отличаются от свойств и функций их отдельных элементов.
Отличительной чертой рассмотренных САУ является поступление на их входы так называемой обратной информации, необходимой для контроля (т. е. наличие обратной связи). Так как ОС замыкает канал управления, такое управление называют замкнутым.
При управлении с ОС значение управляющей переменной постоянно сопоставляется с ее заданным (эталонным) значением. Цель управления — сделать эти величины близкими, несмотря на различные помехи.
Контур управления — это система, состоящая из объекта управления и регулятора (управляющей системы, с помощью которой добиваются нужного качества управления).
К основным функциям контура управления относятся: измерение, сравнение и реагирование (выработка команды управления u(t) объектом), которые должны по возможности выполняться оптимально. В этом случае контур управления, несмотря на различные помехи, будет постоянно поддерживать управляемую переменную близкой к ее заданному значению.
|
из
5.00
|
Обсуждение в статье: Примеры систем автоматического управления. |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы