 |
Главная |


Математическая модель нестационарного динамического объекта
|
из
5.00
|
Введение
Информация об объекте управления может быть получена путем измерения соответствующих параметров. Однако не все параметры могут быть непосредственно измерены из-за отсутствия необходимых средств измерения или недопустимости этих параметров для контроля.
Это приводит к снижению качества управления, и особенно проявляется при управлении объектами, параметры которых являются функциями времени. Такие объекты принято называть нестационарными динамическими объектами.
Однако проблема построения информационно-управляющих систем нестационарных динамических объектов (НДО), а также проблема комплексной оценки анализа параметрического и фазового состояния объектов с неизвестными и переменными во времени динамическими характеристиками, и неполным вектором измерения фазовых координат, не нашли должного освещения в современной литературе. В тоже время целесообразность решения этих задач становиться очевидной.
Особое внимание в данной работе отводится анализу обоснования выбранных методов и критериев, принципа функционирования, оценки результатов и рекомендаций о возможных путях повышения систем автоматического управления.
По заданному нестационарному дифференциальному уравнению, которым описывается поведение объекта управления, находится параметрическая функция. Выбирается метод решения синтеза системы с учетом ограничений.
Методом квазистационарности находим передаточную функцию объекта и по заданным показателям качества переходного процесса строим желаемую ЛАЧХ скорректированной системы, а затем находим передаточную функцию, схему и параметры корректирующего устройства.
Синтез системы управления квазистационарным объектом
Математическая модель нестационарного динамического объекта
Для представления динамического процесса заданного системой дифференциальных уравнений в переменных состояния решим её относительно старшей производной:
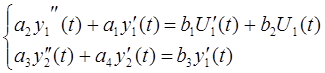 , (1.1)
, (1.1)
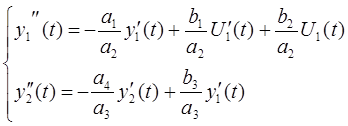 . (1.2)
. (1.2)
Полученная система дифференциальных уравнений (1.2) представляет собой структуру динамического процесса в переменных состояния
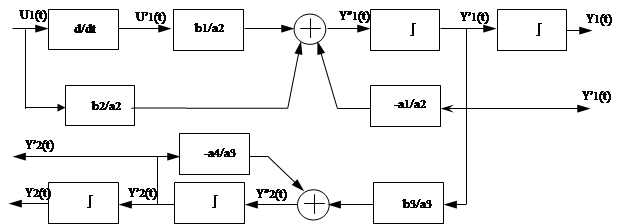
Анализ системы (1.2) показывает, что объект управления содержит: два сумматора складывающих все компоненты входящие в динамический процесс. На вход сумматоров подаётся составляющая входного возмущения, реакция объекта и составляющая производная от реакции объекта.
Схема динамического процесса в переменных состояния будет иметь вид.
Рисунок 1 - Схема динамического процесса в переменных состояния
|
из
5.00
|
Обсуждение в статье: Математическая модель нестационарного динамического объекта |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы