 |
Главная |


Разработка и расчет принципиальной схемы
|
из
5.00
|
В качестве элементной базы для реализации структурной схемы замкнутой скорректированной системы управления выбираем операционный усилитель типа К140УД7, с параметрами
Uпит = ±15, Iвх = 200 нА, Кос = 60 дБ, f = 0,8МГц, Uвых. max = 10.5 В,
Rвх = 0.4Мом, Ku = 5·104.
Основные звенья, которые используются в разработанной системе это: сумматор, усилительное звено, апериодическое звено и форсирующее звено.
Сумматор.
Внешний вид сумматора представлен на рисунке рис.4.
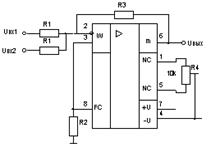
Рисунок 4 - Сумматор на основе операционного усилителя
Резисторы R1= R2 =R3 = R4 = 20 кОм.
Усилительное звено.
Данное звено усиливает входной сигнал до уровня, необходимого для срабатывания логический элементов.
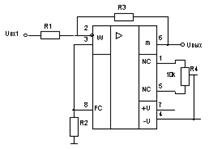
Рисунок 5 - Усилительное звено на основе операционного усилителя
Принимаем R1 = 20 кОм, тогда R2 будет равным
R3 = k*R1.
R2 = (R1*R3) / (R1+R3). (1.28)
Тогда для кр = 595,28, R3 = 20000* 595,28 = 12 МОм, R2 = 20 кОм;
Апериодическое звено.
Апериодическое звено первого порядка используемое в разрабатываемом устройстве приведено на Рис.6.
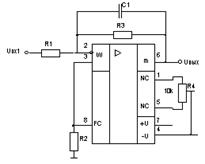
Рисунок 6 - Апериодическое звено на основе операционного усилителя
Постоянная времени апериодического звена равна
T= R*C, (1.29)
откуда прияв R1=R3= 20 кОм найдем
R2 = R1/2 =10 кОм, (1.30)
Сi = Ti/R1.
Для T2 = 0.1 c, С = 5 мкФ; Т1 = 44 с, С = 2.2 мФ;
Т3 = 0.025 с, С = 1,25 мкФ; Т2к = 0.021 с, С = 1.05 мкФ.
Форсирующее звено.
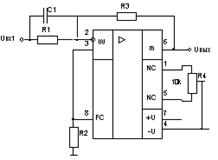
Рисунок 7 - Форсирующее звено на основе операционного усилителя
Задаемся R1 = R3 = 20 кОм, тогда
R2 = R1/2 = 10 кОм,
Сi = Ti/R1. (1.31)
Для Т1 = 44с, С = 2.2 мФ; Т2 = 0.1с, С = 5 мкФ;
Т1к = 0.25с, С = 12.5 мкФ; Т3 = 0.025с, С = 1.25 мкФ.
Принципиальная схема разработанного устройства приведена чертеже Э3.
Заключение
При построении системы автоматического управления использовалось несколько методов исследования объекта управления.
Метод пространства состояний позволил представить нестационарный объект управления схемой в пространстве состояний, определить вектор состояния, вектор изменения, динамическую матрицу параметров и провести исследование объекта при различных возмущающих и управляющих воздействиях, а также определить область управляемости при фиксированных возмущающих воздействиях.
Метод квазистационарности был применен для нахождения передаточной функции квазистационарного объекта и построения желаемой логарифмической амплитудно-частотной характеристики скорректированной системы по показателям качества переходного процесса, а также нахождения передаточной функции, схемы и параметров корректирующего звена.
В результате нами была разработана система автоматического управления нестационарным динамическим объектом, которая имеет достаточный запас как по фазе, так и по амплитуде.
Список литературы
1. Барковский В.В. и др. Методы синтеза систем управления. - М.: Машиностроение, 1969.
2. Володченко Г.С. Синтез адаптивной системы оптимального управления нестационарным объектом одного класса. - Республиканский науч.-тех. Сб. АСУ и приб. Автоматики. Вып.50 - Высшая школа, 1978.
3. Воронов А.А. и др. Теория автоматического управления. - М.: Высш. шк., 1977.
4. Солодов А.В., Петров Ф.С. Линейные автоматические системы с переменными параметрами. - М.: Наука, 1971.
|
из
5.00
|
Обсуждение в статье: Разработка и расчет принципиальной схемы |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы