 |
Главная |


Программная система «МОМДИС» для отладки алгоритмов, моделирования и оптимизации ММС и исследования СТЭК
|
из
5.00
|
9.1.1. Общая характеристика ПС «МОМДИС»
Назначение: ПС «МОМДИС» позволяет проектировать в интерактивном режиме параметризованные программно-корректируемые законы управления сложных систем, функционирующих в условиях конфликта и неопределенности.
Принцип действия: ПС «МОМДИС» состоит из совокупности двух больших подсистем: подсистемы пользовательского интерфейса и математической подсистемы. Математическая подсистема состоит из необходимых для проектирования подсистем моделирования и оптимизации. Пользовательский интерфейс позволяет гибко управлять процессом проектирования и получать полную информацию в виде графиков и таблиц. После введения в ПС динамической модели сложной системы в виде набора коалиционных структур на множестве взаимодействующих объектов управления производится оптимизация управления многообъектной системой по вектору показателей. Подсистема оптимизации содержит ряд модулей, которые отдельно и в совокупности позволяют найти оптимальное управление или закон управления при бескоалиционном, коалиционном и кооперативном взаимодействии объектов на основе методов оптимизации по Нэшу, Парето, Шепли, по методу «угроз и контругроз» и др. Проектировщик имеет возможности комбинировать решения для получения стабильно-эффективных компромиссов. Для выбора начальных приближений применяется модуль сетевого глобального анализа. Поэтому алгоритмы приобретают двухэтапный характер. Для получения и отладки законов управления реализуется потактовая комбинация подсистемы моделирования и оптимизации.
В ПС «МОМДИС» реализованы оригинальные, модифицированные и классические методы получения стабильных (равновесных) и эффективных (векторно-оптимальных) игровых решений, а также вновь полученные комбинации данных методов в виде стабильно-эффективных компромиссов при взаимодействии коалиций динамических объектов или в условиях неопределенности.
В описании первых версий ПС «МОМДИС» в полной мере использованы преимущества классического процедурного подхода на языке «Модула-2» и объектного проектирования на языке «Оберон-2», поэтому гибкая внутренняя структура ПС позволяет как встраивать дополнительные модели, так и использовать ПС при создании других систем. ПС «МОМДИС» реализована в виде совокупности динамических подгружаемых библиотек. Возможно исследование задач большой размерности. Последняя версия реализована на основе программной среды MATLAB.
Область применения: оптимизация управления и моделирование в технических, экономических, биомедицинских, социальных и других системах.
Комплектация оборудования: IBM-совместимый компьютер с процессором не ниже Pentium, 3,5 Мб свободного дискового пространства, операционная система Windows’95 и выше. Позволяет исследовать взаимодействие до четырех коалиций, размерность векторного целевого функционала £12; порядок вектора состояния £50; порядок вектора управления £20; число компонент вектора измеряемого выхода для вычисления векторного целевого функционала £12.
ПС «МОМДИС» была представлена на выставке «Информационные технологии в образовании» 28 мая – 2 июня 1999 г. Минобразования РФ.
9.1.2. Описание структуры ПС «МОМДИС»
Структурная схема ПС «МОМДИС», основы которой изложены в работах [48, 213, 414], дана на рис. 9.1.
Как было указано выше, объектно-ориентированная структура ПС «МОМДИС» сформирована как совокупность двух больших подсистем: математической подсистемы и подсистемы отображения информации и пользовательского интерфейса.
Математическая подсистема. Как следует из рис. 9.1, математическая подсистема включает совокупность методов моделирования и оптимизации. В системе представлены десять методов интегрирования (Эйлера, Адамса второго и четвертого порядка, Рунге–Кутта второго, четвертого и шестого порядка, Кутта–Мерсона четвертого порядка, Гира четвертого порядка, Дорманда–Принса пятого порядка, экстраполяционный метод с переменным шагом и порядком - обобщение схемы Рунге–Кутта).

Рис. 9.1. Структура ПС «МОМДИС»
Каждый из методов применяется к своему классу задач, однако интерфейс организован таким образом, что разработчик в любой момент может использовать любой метод.
Математическая подсистема реализует функции имитационного моделирования, когда на начальном этапе проектирования отлаживается математическая модель системы, исследуется влияние различных факторов на динамические свойства системы, а на заключительном этапе исследуются свойства системы в окрестности полученных оптимальных режимов.
В настоящее время для настройки параметров ПКЗУ и моделирования ПКЗУ ММС формируется последовательная процедура потактового моделирования и оптимизации. В ПС «МОМДИС» реализованы рассмотренные в главах 2–6 методы оптимизации ММС: Нэш-оптимизация (см. гл. 2); Парето-оптимизация (см. гл. 3); W-оптимизация (см. гл. 3); УКУ-оптимизация (см. гл. 4); Шепли-оптимизация как комбинация Нэш- и Парето-подходов (см. гл. 5): глобальный анализ на основе сетевых методов (см. гл. 3), который, как правило, формирует первый этап выбора начальных приближений в алгоритмах оптимизации.
В качестве примера на рис. 9.2 приведена блок-схема алгоритма Нэш-оптимизации.
На основе комбинации Парето–Нэш–УКУ–Шепли-оптимизации ПС «МОМДИС» позволяет формировать ряд стабильно-эффективных компромиссов в ММС (см. главу 6).

Рис. 9.2. Блок-схема алгоритма Нэш-оптимизации
Библиотека алгоритмов имеет двухуровневую структуру, где I-й уровень - элементы алгоритмов, II-й уровень - собственно алгоритмы Парето–Нэш–УКУ–Шепли-оптимизации, организующие работу алгоритмов I-го уровня в соответствии с определенной логикой.
В библиотеку I-го уровня включены следующие структурные элементы алгоритмов:
· вычисление конуса доминирования и выбор направления спуска;
· вычисление шаговой длины внутри конуса;
· элементы шаговой оптимизации с линейными ограничениями (направление движения - по градиенту (аппроксимирующему градиенту), по методу возможных направлений, по методу Хука–Дживса; шаговая длина - дробление шага, параболическая интерполяция, золотое сечение, комбинация двух последних, модификация дробления шага на случай разрывных показателей; определение состава активных ограничений; вычисление расстояния до границы допустимой области в данном направлении);
· использование стандартной подпрограммы симплекс-метода;
· численное дифференцирование (вектора по вектору, скаляра по вектору) (формирование односторонних, центральных разностей);
· организация штрафных итераций при наличии нелинейных ограничений [213];
· организация вычислений при варьировании подвектора параметров qÎQ в алгоритме Нэш-оптимизации;
· элементы глобального анализа (генерация ЛП-последовательности, равномерно заполняющей допустимую область, или ортогональной последовательности; составление таблицы испытаний; W- или УКУ-оптимизация таблицы);
· вычисление значений векторного показателя.
Обоснованием модульного построения ПС на базе структурного подхода «сверху-вниз» является возможность реализации любой программы с использованием лишь трех основных конструкций:
· функционального блока (рис. 9.3а);
· конструкции обобщенного цикла «DO-WHILE» (рис. 9.3б);
· конструкции принятия двоичного решения «IF-THEN-ELSE» (рис. 9.3в).

Рис. 9.3. Основные конструкции для реализации программ
Математическая подсистема взаимодействует с подсистемой пользовательского интерфейса, получая от нее модель и данные для расчетов и передавая ей результаты для отображения.
Подсистема отображения и пользовательского интерфейса. Данная подсистема объединяет совокупность модулей, отвечающих за общение программы с внешним миром, как то: чтение-запись данных и результатов, отображение и манипулирование данными и др. Сюда же можно отнести и подсистему анализа и компиляции исходной модели.
Оболочка ПС «МОМДИС» позволяет в режиме диалога изменять параметры системы, задавать начальные данные, выбирать методы моделирования и оптимизации, просматривать и анализировать полученные результаты. Разработан оригинальный многооконный пользовательский интерфейс. Переработана система отображения информации, которая позволяет одновременно просматривать необходимое количество графиков сразу у нескольких моделей и выполнять с ними необходимые действия.
Для начала работы с ПС «МОМДИС» необходимо записать математическую модель исследуемой системы в форме Коши, для задания уравнений используется модуль USER.PAS.
После преобразования в пошаговую форму можно записать их в модуль, также в этом модуле задаются и показатели системы.
Параметры моделирования и оптимизации задаются, например, в процедурах Nd, NdPar, NdNash, NdOmega, NdUKU и т.д.
Процедура Nd определяет: порядок системы дифференциальных уравнений, размерности векторов состояния и выхода, полное время интегрирования, шаг, число показателей, параметров.
Процедура NdPar определяет: переменные и массивы для данных, специально для Парето-оптимизации: число точек в таблице испытаний, число оптимизируемых параметров.
Процедура NdNash определяет: число коалиций, начальное значение шаговой длины, ускоряющий множитель в алгоритме Хука–Дживса и др.
Процедура NdOmega определяет матрицы конуса доминирования и все действия с конусом.
Процедура NdUKU определяет коалицию и контркоалицию, действия для вычисления UKU и т.д.
Все остальные действия по оптимизации, моделированию, анализу формируются через оболочку ПС.
Самый верхний уровень оболочки в экранном представлении предлагает один из четырех вариантов действия: моделирование, оптимизация, выбор параметров, анализ результатов.
Диалоговое окно «Параметр» предлагает перейти к окнам: вектор параметров, вектор нижних ограничений на параметры, вектор верхних ограничений на параметры, вспомогательный вектор, вектор состояния системы, а также задать параметры моделирования: время моделирования, шаг интегрирования, максимальный шаг интегрирования, точность вычислений, максимальное число шагов.
Для последовательного перехода между элементами используются соответствующие оконные «кнопки», клавиши и «мышь».
Для загрузки параметров с диска в систему и наоборот используется окно диспетчера файлов «Читать из файла». После загрузки модели переходим к окнам моделирования и оптимизации с помощью окна верхнего уровня. Окно «Моделирование» содержит информацию к выбору из 10 методов интегрирования. Окно «Оптимизация» предлагает выбрать один из семи путей оптимизации. Если необходима, например, Парето-оптимизация, нажимаем кнопку «Парето», и появляется окно «Параметры Парето-оптимизации», в котором имеются разделы: «Оптимизируемые величины», «Файл результатов» и «Число точек».
В первой части окна задаем параметры и показатели, подлежащие оптимизации (параметров £ 50, показателей £ 12).
Во второй: «П-сеть» - файл, в котором будет храниться вся ЛП-сеть, «П-область» - файл, в котором хранится часть ЛП-сети, являющаяся областью Парето.
В третьей части: «Число точек» - параметр, определяющий количество точек ЛП-сети.
Подобные окна со своей необходимой установочной информацией содержит каждый модуль оптимизации. Для просмотра результатов возвращаемся на верхний уровень оболочки и клавишей «Результаты» выходим на многооконную систему с масштабированием.
Таковы некоторые особенности созданного интерфейса.
Для передачи информации в математическую подсистему моделирования используется объект Container, содержащий необходимые поля данных (массив начальных параметров, массивы ограничений на параметры, массивы переменных состояния, вспомогательный объект Any, поля, определяющие порядок системы, параметры оптимизации и др.) Объект Container позволяет производить чтение/запись параметров модели (с помощью методов Load и Store), запись результатов моделирования и оптимизации - SolutionOut. Такая унификация обмена данными позволяет снизить риск сбоя (отказа) при работе всей системы, облегчить поддержку всей системы в целом.
Получение и исследование стабильно-эффективных компромиссов предполагает разработку процедур последовательной оптимизации в соответствии со свойствами СТЭК, когда СТЭК с номером i сужает множество решений, полученных для СТЭК с номером i – 1, для последующего определения на нем решений на основе СТЭК с номером i+1.
Часть рассмотренных процедур реализована, часть составляет одну из перспективных задач развития ПС «МОМДИС» в рамках поддержки алгоритмов поиска СТЭК.
Технологической перспективой развития ПС «МОМДИС» является развитие программного блока «МОМДИС» в программной среде «MATLAB».
9.2. Программные системы «Гарантия-М», FILТR, FILТR-1,
FILТR-2 для исследования СТЭК на основе
антагонистического ядра
9.2.1. Программная система «Гарантия-М» и ее функциональные возможности для моделирования законов управления ЛА [67, 414]
Повышение эффективности законов управления пространственным движением летательных аппаратов (ЛА) может быть достигнуто в результате моделирования проектируемых законов управления с использованием современных вычислительных средств и методов. Однако при создании специализированных программно-аппаратных моделирующих комплексов необходимо учитывать некоторые особенности прикладного характера, оказывающие существенное влияние на качество получаемых при моделировании конкретных практических задач результатов.
Во-первых, при решении задач одновременного управления несколькими взаимодействующими аэродинамическими объектами (коалициями ЛА) неизбежно возникают конфликтные ситуации, требующие динамической перенастройки и программной коррекции законов управления пространственным движением, что в свою очередь требует наличия в системе моделирования механизма анализа промежуточных состояний и возможности гибкой перенастройки параметров вычислительного процесса.
Во-вторых, необходимо обратить внимание на то, что математическая модель летательного аппарата представляет собой сложную математическую конструкцию, состоящую из нескольких систем нелинейных дифференциальных и алгебраических уравнений высокой размерности, описывающих объект управления в различных системах координат и с наличием перекрестных связей между ними. Решение этих систем с применением численных методов должно осуществляться с различной степенью дискретизации, поскольку процессы продольного, углового движения ЛА, а также отработки команд управления системой стабилизации протекают с различной степенью быстродействия.
В-третьих, на динамику летательного аппарата в реальных условиях оказывает влияние целый ряд случайных возмущающих воздействий и неопределенных факторов, которые также необходимо учитывать при проектировании и моделировании систем управления ЛА.
Все перечисленные факторы были учтены при разработке специализированной системы моделирования и анализа эффективности законов управления динамикой пространственного движения ЛА «Гарантия-М».

Рис. 9.4. Структура системы моделирования «Гарантия-М»
Система моделирования «Гарантия-М» предназначена для проектирования, моделирования и анализа эффективности законов управления пространственным движением ЛА в условиях конфликта и неопределенности. С ее помощью можно моделировать динамику систем с различной степенью сложности, осуществлять динамическую настройку параметров математических моделей объектов и законов управления, строить произвольные зависимости отслеживаемых параметров. К функциональным возможностям системы можно отнести: моделирование в конкретной конфликтной ситуации; описание начальных условий взаимодействия ЛА; формирование математических моделей и их параметров для каждого ЛА; внедрение проектируемых или выбор штатных законов управления аэродинамическими объектами; проведение расчетов с заданной степенью точности с использованием различных численных методов решения систем дифференциальных уравнений; контроль промежуточных результатов моделирования; автоматический выбор количества аэродинамических объектов и условий их взаимодействия, завершение моделирования при достижении заранее обусловленного события или результата; вывод сообщений об ошибках пользователя и сбоях программы; вывод результатов в графическом и табличном виде с последующим их анализом; хранение вновь разработанной или измененной модели на дисковом накопителе; интерактивный режим работы с дружественным интерфейсом, не требующим от пользователя длительного предварительного обучения работе с программой.
Система моделирования «Гарантия-М» разработана по технологии объектно-ориентированного программирования и предназначена для работы в среде операционных систем Windows 95, Windows NT 4.0 и более поздних версий. Исходные тексты системы написаны на языке программирования Object Pascal в визуальной среде разработки программ Delphi (см. Дж. Матчо, Дэвид Р Фолкнер. Delphi: Пер. с англ. – М.: Бином, 1995 – 464 с.: ил.). Структура «Гарантии-М» приведена на рис. 9.4.
Общее управление всеми процессами и функционированием системы моделирования в целом осуществляется с помощью программной оболочки выполненной в стиле MDI-приложений (Multiple Document Interface), включающей в себя главное окно программы и систему меню (см. рис. 9.5). С помощью набора команд из меню осуществляется выбор необходимых действий и раскрытие вложенных окон программы. Для быстрого доступа к ряду часто выполняемых действий имеется плавающая панель инструментов с набором функциональных кнопок, перемещаемая с помощью мыши в любое место экрана. По желанию пользователя, например при выводе графической информации на весь экран, она может быть временно выключена.
Для удобства проектировщика систем управления ЛА все части программы с математическим описанием моделей, законов управления, алгоритмов взаимодействия аэродинамических объектов объединены в единый расчетно-аналитический модуль, который является вычислительным ядром системы моделирования. Все существенные изменения по корректировке моделей ЛА, внедрению новых законов управления должны быть отражены в данном модуле в виде отдельных подпрограмм или самостоятельно разработанных объектов. При использовании же для решения типовых задач сценариев, моделей, штатных законов управления, заложенных в программу на стадии разработки, достаточно лишь менять их параметры и задавать условия и количество взаимодействующих ЛА. В пакете «Гарантия-М» имеется ряд дополнительных модулей (см. рис. 9.4), вызываемых с помощью меню из главного окна программы и позволяющих быстро редактировать и перенастраивать необходимые параметры.
Решение систем дифференциальных уравнений динамики ЛА производится одним из методов численного интегрирования, объединенных в отдельный программный модуль. Как показывает практика, исходный набор методов оказывается вполне достаточным для решения большинства практических задач и не нуждается в дополнении, хотя такая возможность предусмотрена.
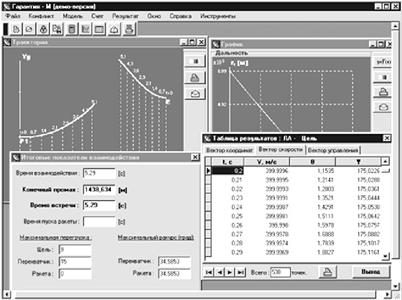
Рис. 9.5. Главное окно программы
Для удобства использования и хранения расчетных параметров результаты моделирования выводятся в таблицы локальной базы данных в формате Paradox 5.0 for Windows. В качестве посредника между программой и данными, хранимыми в таблице на диске, используется приложение Borland Database Engine (BDE), иногда упоминаемое в литературе как IDAPI. Его наличие на компьютере, где ведутся расчеты с помощью пакета «Гарантия-М», обязательно.
Отличительной особенностью системы моделирования является развитый графический интерфейс (см. рис. 9.5). Учитывая особенности решаемых с ее помощью задач, были разработаны подсистемы построения двумерных и трехмерных графиков. В каждом графическом окне программы допускается выводить до 10 произвольных зависимостей, при этом можно изменять цветовую палитру, толщину линий, осуществлять масштабирование и поворот осей координат. В трехмерных осях координат осуществляется построение траекторий движения объектов, что позволяет более наглядно исследовать пространственное маневрирование ЛА.
Для нормальной работы системы моделирования требуется объем оперативной памяти не менее 8 МБ. Общий размер программных модулей, устанавливаемых на жесткий диск, составляет около 10 МБ.
К другим особенностям программной системы «Гарантия-М» можно отнести возможность вмешательства пользователя в процесс моделирования и постоянный контроль за ходом вычислений. Результаты моделирования одновременно могут быть выведены на экран в различном виде, как это показано на рис. 9.5, что очень удобно для проведения анализа противодействия ЛА.
В «Гарантии-М» летательные аппараты, законы управления ЛА, численные методы интегрирования представлены в форме объектов. Это позволяет при необходимости легко расширять функциональные возможности системы путем описания новых объектов, наследующих все свойства и методы своих «родителей» с добавлением дополнительных свойств и методов.
Представление результатов моделирования в виде базы данных формата Paradox 5.0 for Windows обеспечивает возможность их конвертации в другие форматы баз данных, например, FoxPro, Dbase, Excel и т.д., с которыми знаком пользователь системы. Это дает возможность осуществлять над результатами любые (не предусмотренные системой) действия.
9.2.2. Программные системы FILTR, FILTR-1, FILTR-2
[61, 66, 117]
Алгоритмическое обеспечение метода поиска оптимальных (гарантирующих) управлений объекта Q. Общую структуру программной системы [54, 66] «FILTR» для решения задач оптимального управления рекомендованными в 8.5 методами, можно представить в виде изображенной на рис. 9.6 (сервисные блоки не показаны). Основными в этой схеме, для задачи поиска оптимальных гарантирующих стратегий, являются блок 2, блок 5 и блок 6.
Структура блока 6 приведена в [54, 66]. Основу блока составляет программа, которая при заданном моменте времени окончания процесса  , векторах фазовых координат
, векторах фазовых координат  ,
,  ,
,  ,
,  и множителе Лагранжа
и множителе Лагранжа  вычисляет математическое ожидание и корреляционную матрицу вектора «промаха»
вычисляет математическое ожидание и корреляционную матрицу вектора «промаха»  и значение функционала
и значение функционала  , вычисляет по этим результатам функционал качества
, вычисляет по этим результатам функционал качества  , а также реализует какой-либо численный метод решения нелинейного алгебраического уравнения для вычисления множителя Лагранжа
, а также реализует какой-либо численный метод решения нелинейного алгебраического уравнения для вычисления множителя Лагранжа  , обеспечивающего заданный уровень ограничения сложности
, обеспечивающего заданный уровень ограничения сложности  . Исходными данными для работы программы, являются: заданный уровень ограничения сложности
. Исходными данными для работы программы, являются: заданный уровень ограничения сложности  ,
,  ; исходное значение множителя Лагранжа
; исходное значение множителя Лагранжа  ; максимально допустимое количество итераций для определения
; максимально допустимое количество итераций для определения  . При этом реализуется известный «метод секущих», при котором итерационный процесс задается формулой
. При этом реализуется известный «метод секущих», при котором итерационный процесс задается формулой
 (9.1)
(9.1)
где  ,
,  .
.

Рис. 9.6. Структура программной системы «FILTR»
Блоку 5 соответствует (см. рис. 9.6) программа, которая реализует некоторый метод поиска минимума  функционала
функционала  по . Обычно момент времени окончания процесса
по . Обычно момент времени окончания процесса  задается с помощью некоторой монотонной функции
задается с помощью некоторой монотонной функции  При этом полагается, что
При этом полагается, что
 (9.2)
(9.2)
с заданной точностью  . Этот способ задания
. Этот способ задания  (см. 8.1.3) принят в данном пункте. Исходными данными для работы программы являются: моменты времени
(см. 8.1.3) принят в данном пункте. Исходными данными для работы программы являются: моменты времени  ,
,  ,
,  , исходное значение момента времени
, исходное значение момента времени  , максимально допустимое количество итераций для определения
, максимально допустимое количество итераций для определения  . В модуле FIN0 реализуется метод поиска локального поиска минимума путем сокращения интервала неопределенности – «метод золотого сечения» [10].
. В модуле FIN0 реализуется метод поиска локального поиска минимума путем сокращения интервала неопределенности – «метод золотого сечения» [10].
Программный блок 2 иллюстрируем случаем, когда управление объекта Q ограничено по модулю  и оптимальное гарантирующее управление
и оптимальное гарантирующее управление  определяется в классе релейных управлений с конечным числом точек переключения [66].
определяется в классе релейных управлений с конечным числом точек переключения [66].
Обозначим через  количество точек переключения в каждой компоненте исходного управления, а через
количество точек переключения в каждой компоненте исходного управления, а через  ,
,  ,
,  – моменты переключения j-й компоненты вектора управления
– моменты переключения j-й компоненты вектора управления  . Тогда очевидны ограничения на параметры
. Тогда очевидны ограничения на параметры
 ,
,  ;
;  , (9.3)
, (9.3)
которые естественно упорядочить следующим образом:
 (9.4)
(9.4)
Полученная  параметрическая задача нелинейного программирования с ограничениями (9.3) может быть решена известными методами нелинейного программирования.
параметрическая задача нелинейного программирования с ограничениями (9.3) может быть решена известными методами нелинейного программирования.
Общая структура блока 2 для нахождения оптимальных гарантирующих (в классе релейных функций) управлений программно-управляемого объекта Q включает в себя два сервисных модуля (модуль ввода и контроля исходных данных и модуль вывода результатов), модуль, реализующий один из методов нелинейного программирования с ограничениями, а также обрабатывающий модуль.
Обрабатывающий модуль вычисляет для каждого набора параметров , ,  (точнее, для соответствующего вектора управления ) значение функционала
(точнее, для соответствующего вектора управления ) значение функционала  , где
, где  . Кроме того, для работы программы необходимо вычисление ограничений (9.3).
. Кроме того, для работы программы необходимо вычисление ограничений (9.3).
При решении задачи поиска гарантированной оценки эффективности заданной  объекта Q блок 2 исключается (рис. 9.6). При исключении блока 2 оптимизации управления объекта Q задача превращается также в задачу гарантированной оценки многомерного фильтра с заданной частью и прототипом [27, 61].
объекта Q блок 2 исключается (рис. 9.6). При исключении блока 2 оптимизации управления объекта Q задача превращается также в задачу гарантированной оценки многомерного фильтра с заданной частью и прототипом [27, 61].
С учетом изменений разработаны варианты получения характеристик фильтра с его ограничением промежуточной координаты FILTR-1 и учетом прототипа FILTR-2 [117].
Оценка вычислительной сложности алгоритма ПС «FILTR» для получения описания объекта Р в форме фильтра и гарантирующего управления объекта Q дана в [54, 63]. Получены оценки вычислительной сложности алгоритма и даются рекомендации по её уменьшению.
Кардинальное повышение скорости вычислений функционала качества может быть достигнуто при реализации алгоритма на многопроцессорных ВС. При этом возможно распараллеливание на уровне параллельных ветвей алгоритма, выполнение матричных операций на векторных процессорах, использование параллельных алгоритмов вычисления квадратур1.
В работе2 приводятся априорная и апостериорная оценки погрешности вычислений при параметрической численной оптимизации задачи фильтрации на стадии оценки множителя Лагранжа и вычисления показателя качества.
9.3. Оценки обеспечения реального времени алгоритмов
и элементы их параллельной реализации
9.3.1. Параллельная реализация оптимального ПКЗУ высокоскоростного ЛА с учетом бортовой
вычислительной сети
Формирование требований к системе управления ЛА для реализации алгоритмов оптимального ПКЗУ. Оптимальный программно-корректируемый закон управления может быть реализован на борту ЛА-перехватчика в режиме самонаведения в соответствии с функциональной схемой на рис. 9.7.
Для этого на борту ЛА необходимо иметь следующие технические средства: следящий силовой гиростабилизатор с радиолокационным координатором цели, позволяющий измерять:  – относительную дальность;
– относительную дальность;  – скорость изменения относительной дальности;
– скорость изменения относительной дальности;  – угловые скорости линии визирования цели в инерциальном пространстве;
– угловые скорости линии визирования цели в инерциальном пространстве;  – углы пеленга цели в связанной СК; датчик угла атаки
– углы пеленга цели в связанной СК; датчик угла атаки  ; датчик угла скольжения
; датчик угла скольжения  ; датчик угла тангажа
; датчик угла тангажа  ; датчик угла рыскания
; датчик угла рыскания  , датчик угла крена
, датчик угла крена  ; устройство измерения модуля собственной скорости V; высотомер H; бортовой цифровой вычислительный комплекс (БЦВК).
; устройство измерения модуля собственной скорости V; высотомер H; бортовой цифровой вычислительный комплекс (БЦВК).
Рассмотрим этапы формирования ПКЗУ (рис. 7.36) на борту высокоскоростного ЛА-истребителя. Приближенная функциональная схема системы управления вооружением истребителя-перехватчика приведена на рис. 9.8.

Рис. 9.7. Функциональная схема системы управления ЛА:
ССГ с РКЦ – следящий силовой гиростабилизатор с радиолокационным координатором цели; БЦВК – бортовой цифровой вычислительный комплекс; СС – система стабилизации

Рис. 9.8. Приближенная функциональная схема СУВ ЛА:
БРЭО – бортовое радиоэлектронное оборудование; ИКВК – индикатор курсовертикали; СВС – система воздушных сигналов; ОПР – оптический прицел; И – индикация;
П – подсказка; А – автопилот
Первый этап реализуется путем ввода данных с бортовых датчиков и радиолокационного прицельного комплекса. При этом осуществляется аналого-цифровое преобразование сигналов с датчиков в АЦП и быстрое преобразование Фурье радиолокационных сигналов в ЭВМ Ц200. ЭВМ Ц102 осуществляет управление локатором, обеспечивая непрерывное слежение за целью, и выдает в ЭВМ СУВ (Ц101) относительные координаты цели в полярной системе координат.
На втором этапе в ЭВМ СУВ вычисляются вектора состояний ЛА-цели и ЛА-перехватчика, осуществляется преобразование координат, определяются фактические значения параметров математических моделей ЛА.
Третий и четвертый этапы являются самыми времяемкими. Здесь производится формирование ансамбля экстремальных траекторий движения цели, построение области достижимости с учетом ограничения на вектор состояния. Определяются множества потребных траекторий движения перехватчика, рассчитываются параметры законов управления. Вычисляются множества прогнозируемых конечных промахов. Производится оптимизация на множестве прогнозируемых конечных промахов, выбирается точка прицеливания и определяется оптимальный закон управления преследователем на такте.
На пятом этапе осуществляется коррекция ПКЗУ и выдача из ЭВМ СУВ команд управления автопилоту или летчику (в виде подсказки на индикаторе на лобовом стекле).
Оценим необходимое для реализации оптимального ПКЗУ быстродействие БЦВК. Обеспечение требуемой точности наведения возможно при формировании области достижимости ЛА не менее чем из 200 точек. Алгоритм синтеза ПКЗУ при этом содержит около 1,2 млн. операций с плавающей точкой. При такте выдачи команд автопилоту примерно 0,1 сек для высокоскоростного ЛА типа самолет-истребитель требуемое быстродействие вычислителя составляет 12 млн. операций с плавающей точкой в секунду. Данное требование является трудновыполнимым в реальной системе, так как существующие БЦВМ не обладают достаточной производительностью. Кроме того, задача наведения не является единственной задачей, решаемой на борту, и поэтому она не может занимать все время вычислительной системы. Реализовать оптимальный ПКЗУ можно путем распараллеливания алгоритма и его выполнения в многопроцессорной системе или применением приближенного субоптимального ПКЗУ реального времени.
Параллельная реализация оптимального ПКЗУ и оценка его быстродействия в мультитранспьютерной вычислительной системе
[72, 73]. На предмет декомпозиции алгоритма оптимального ПКЗУ ЛА-перехватчика сравнивались следующие типы параллелизма: дублирование, конвейерный параллелизм, геометрический параллелизм, алгоритмический параллелизм, гибридные методы.
В качестве основного критерия для выбора того или иного метода распараллеливания рассматривалось время получения ПКЗУ (программный такт выработки команд управления).
Проведенный анализ позволил сделать следующие выводы:
· использование дублирования или конвейерного способа обработки информации ускоряет лишь частоту выдачи сигналов управления к системе стабилизации и практически не влияет на задержку времени, связанную с вычислением ПКЗУ, что в принципе не удовлетворяет введенному критерию;
· алгоритмический параллелизм, как правило, является наиболее эффективным по степени ускорения в большинстве случаев, но чрезвычайно трудоемок вследствие полной детализации вычисли-тельного процесса;
· геометрический параллелизм дает максимальный результат в случае хорошей геометрической интерпретации решаемой задачи, которая имеет ту или иную степень симметрии, в этом смысле он наиболее подходит для нашего случая;
· гибридные методы используют для сложных ветвистых алгоритмов в сетях с большим количеством транспьютеров. Они представляют собой симбиоз простых типов параллелизма.
Для получения максимального быстродействия при наименьшей трудоемкости с учетом конкретных особенностей распараллеливаемого алгоритма синтеза ПКЗУ ЛА наилучшим в данном случае методом декомпозиции является геометрический параллелизм.
Исходный алгоритм был преобразован для реализации в мультип<
|
из
5.00
|
Обсуждение в статье: Программная система «МОМДИС» для отладки алгоритмов, моделирования и оптимизации ММС и исследования СТЭК |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы