 |
Главная |


Принцип дискретной аппроксимации непрерывной линейной инерционной системы
|
из
5.00
|
Рассмотрим непрерывную линейную динамическую систему с постоянными параметрами. В качестве основных характеристик системы обычно используются передаточная функция К(р) в смысле преобразования Лапласа и импульсная переходная характеристика h(t), представляющая собой реакцию системы на δ-функцию. В общем случае функции К(р) и h(t) являются, как
известно, парой функций, сопряженных по Лапласу:
 (3.1)
(3.1)

Если функция h(t) абсолютно интегрируема, то характеристики К(р) и h(t) связаны прямым и обратным преобразованиями Фурье:
 (3.2)
(3.2)
Формулы (3.2) являются частным случаем формул (3.1).
Для того чтобы при нулевых начальных условиях определить реакцию линейной системы на сигнал произвольного вида, достаточно иметь характеристики К(р) или h (t).
При моделировании в качестве основной характеристики линейной системы удобно использовать импульсную переходную характеристику h(t), с помощью которой можно довольно просто выразить сигнал v(t) на выходе системы через входной сигнал u(t):
 (3.3)
(3.3)
Согласно формуле (3.3) сигнал на выходе линейной системы является результатом скользящего интегрирования входного сигнала с весовой функцией h(t). Формула (3.3) называется, как известно, интегралом Дюамеля, а также формулой свертки.
В формуле (3.3) предполагается, что подынтегральные функции заданы на всей оси, при этом они могут быть неограниченными и ограниченными во времени. В последнем случае значения функций вне области задания полагаются тождественно равными нулю.
При различных односторонних и двусторонних ограничениях во времени функций u(t) и h(t) пределы интегрирования можно уточнить. В наиболее распространенных частных случаях ограничений по времени формула (3.3), как нетрудно показать, имеет следующий вид.
1. Сигнал u(t) неограничен во времени. Функция h(t) имеет одностороннее ограничение: h(t)=0 пр t <<0 (это условие всегда имеет место для физически осуществимых линейных систем),
 (3.4)
(3.4)
2. Сигнал u(t) неограничен во времени. Функция h(t) имеет двустороннее ограничение: h(t)=0 при t<0 и t>T,
 (3.5)
(3.5)
3. Функции u(t) и h(t) имеют одностороннее ограничение: u(t)=0 при t<0 и h(t)=0 при t<0,
 (3.6)
(3.6)
4. Сигнал ц( 0 имеет двусторонне е ограничение: u(t)=0 при t<0 и при t>Т, функция h(t) ограничена с одной стороны: h(t)=0при t<0,
 (3.7)
(3.7)
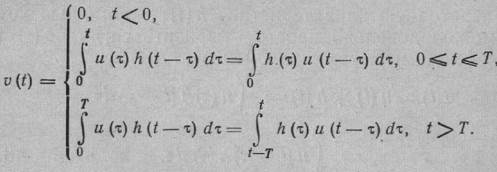
5. Функции u(t) и h(t) имеют одинаковое двустороннее ограничение: u(t)=h(t)=0 при t<0 и при t>T,
 (3.8)
(3.8)
Формула (3.8) используется, например, при анализе прохождения импульсного сигнала через согласованный с ним оптимальный фильтр.
Выражения (3.4) — (3.8) представляют собой непрерывные математические модели линейных динамических систем с постоянными параметрами. Одним из принципов получения цифровых моделей непрерывных систем является переход от уравнений (3.3) — (3.8) к соответствующим дискретным эквивалентам. Рассмотрим методы дискретизации этих уравнений.
|
из
5.00
|
Обсуждение в статье: Принцип дискретной аппроксимации непрерывной линейной инерционной системы |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы