 |
Главная |


Алгоритмы для систем с переменными параметрами
|
из
5.00
|
Одним из преимуществ метода цифрового моделирования линейных динамических систем, основанного на дискретизации непрерывной свертки, является возможность простого обобщения его на случай моделирования линейных систем с переменными параметрами (нестационарных во времени систем).
Связь вход - выход в системах с переменными параметрами, как известно, можно задать с помощью импульсной переходной характеристики h(t, τ), зависящей от двух переменных и описывающей реакцию системы на δ-функцию, поданную на вход в момент времени t, где t - текущее время, τ - время, прошедшее с момента подачи δ-импульса. На рис. 3.2 дан пример реакции
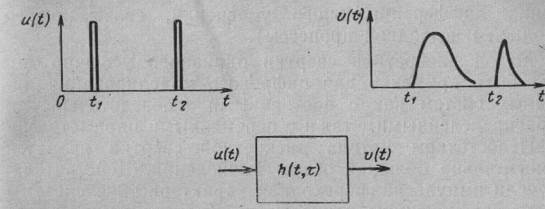
Рис. 3.2.
системы с переменными параметрами на импульсное воздействие, поданное в моменты времени t1 и t2>t1. При таком определении импульсной переходной характеристики нестационарной системы реакция ее на сигнал u(t) запишется в виде

В дискретной форме

или

где c[k] - коэффициенты, зависящие от метода численного интегрирования;
h*(t, τ) - импульсная переходная характеристика приведенной непрерывной части нестационарной системы.
Таким образом, цифровые модели нестационарных линейных систем, основанные на дискретной свертке, представляют собой формулы скользящего суммирования с переменным весом (весом, зависящим от текущего значения дискретного времени).
Заключительные замечания
Рассмотренные выше методы моделирования, использующие дискретную свертку, удобны в тех случаях, когда известна (или легко находится) импульсная переходная характеристика линейной системы (функция Грина дифференциального уравнения, связывающего входной и выходной процессы). Метод дискретной свертки одинаково успешно может быть применен для цифрового моделирования линейных систем как с постоянными (сосредоточенными и распределенными), так и с переменными параметрами. Недостатком метода дискретной свертки является относительно большой объем вычислений. Действительно, если импульсная переходная характеристика системы имеет ограниченную длительность (или допускает ограничение), то для получения одного значения выходного сигнала требуется произвести, как это следует, например, из (3.9), 2N элементарных операций: N умножений и N сложений, не считая операций пересылки. При большом отношении длительности импульсной переходной характеристики к шагу дискретизации число N велико, что и приводит к большим вычислительным затратам.
Моделирование линейных непрерывных
Динамических систем с помощью рекуррентных
Разностных уравнений
Сущность разностных методов состоит в замене процессов в непрерывных линейных системах процессами в эквивалентных импульсных линейных системах, поведение которых можно описать довольно простыми рекуррентными соотношениями (уравнениями в конечных разностях). Математическим аппаратом при этом служит дискретное преобразование Лапласа (z-преобразование). Передаточная функция K*(z) эквивалентной импульсной системы в смысле дискретного преобразования Лапласа является z-преобразованием от импульсной переходной характеристики h*(t) приведенной непрерывной части, т. е.

Для линейных систем с постоянными сосредоточенными параметрами дискретные передаточные функции эквивалентных импульсных систем обычно удается найти в замкнутой форме в виде дробно-рациональной функции
 (3.23)
(3.23)
Производя идентификацию передаточной функции (3.23), приходим к следующему рекуррентному алгоритму формирования дискретных значений выходного сигнала:
 (3.24)
(3.24)
Полученное уравнение во многих случаях значительно сокращает вычисления по сравнению с формулами дискретного свертывания, что показано на приведенных ниже примерах. К настоящему времени предложено большое количество методов аппроксимации передаточной функции K*(z) непрерывной динамической системы дробно-рациональной дискретной передаточной функцией K*(z). Выражения для K*(z) в этих методах получаются непосредственно из рассмотрения различных способов интерполяции входного сигнала, а также другими путями.
Пример:
Пусть задана линейная система с передаточной функцией

Такую передаточную функцию имеет разомкнутая следящая система радиолокационного автодальномера с двумя интеграторами, коэффициент передачи которых  [сек-2], и корректирующей цепью с постоянной времени Тк; Ко - безразмерный коэффициент усиления. Найдем для нее эквивалентные дискретные передаточные функции и рекуррентные моделирующие алгоритмы, используя различные методы дискретной аппроксимации. Передаточная функция К(р) имеет только нулевой полюс кратности r0=2. По методу z-преобразования нахождение дискретной передаточной функции К*(z) сводится к следующей формуле
[сек-2], и корректирующей цепью с постоянной времени Тк; Ко - безразмерный коэффициент усиления. Найдем для нее эквивалентные дискретные передаточные функции и рекуррентные моделирующие алгоритмы, используя различные методы дискретной аппроксимации. Передаточная функция К(р) имеет только нулевой полюс кратности r0=2. По методу z-преобразования нахождение дискретной передаточной функции К*(z) сводится к следующей формуле
 (3.68)
(3.68)

Затем находим
 (3.69)
(3.69)
Где  (3.70)
(3.70)
Подставляя (3.68) и (3.70) в (3.69) и производя элементарные преобразования, окончательно получим
 (3.71)
(3.71)
Отсюда согласно общей формуле  непосредственно получаем рекуррентное уравнение, связывающее дискретный сигнал υ*[n] на выходе системы с дискретным сигналом u[n] на входе системы
непосредственно получаем рекуррентное уравнение, связывающее дискретный сигнал υ*[n] на выходе системы с дискретным сигналом u[n] на входе системы
 (3.72)
(3.72)
Лекцию разработал
Доцент к.т.н. доцент В. Ерохин
26.06.2014
|
из
5.00
|
Обсуждение в статье: Алгоритмы для систем с переменными параметрами |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы