 |
Главная |


Промышленная применимость
|
из
5.00
|
Долгое время не удавалось технически реализовать заманчивую идею создания космического лифта. Основная проблема, тормозящая его создание, заключается в том, что стальные тросы слишком тяжелые и недостаточно прочные. Такой трос оборвется под действием своего собственного веса уже на высоте 10 км. В высоком здании - основная часть веса, который приходится поднимать тросу лифта - это его собственный вес. Кроме того, низкая электропроводность материала троса не позволяет передать по нему электроэнергию большой мощности. Углеродные нанотрубки в сотню раз прочнее стали, они представляют собой монокристаллические структуры. После открытия этих структур в 1991 году исследователем Сумио Иджима (Iijima Sumio) (фирма NEC) [22] углеродные нанотрубки стали ведущим элементом в концепции создания космического лифта. А после открытия в 1998 г. возможности высокотемпературной сверхпроводимости (93,50С) в нанотрубках с внутренними размерами 12 нм - 16 нм, легированных особым образом [21], стало возможно осуществить магнитную левитацию на таком канате.
Этот эффект был уже экспериментально найден в 2004 г. исследователем из Калифорнийского университета Guo-meng (Peter) Zhao [23].
В настоящее время уже налажено массовое производство нанотрубок. Серийное производство калиброванных нанотрубок стоит от 100 до 500 долларов США за один грамм (Carbon Nanotechnologies, Inc.). Существует много современных методов - испарение угольных электродов или получение горячих углеродных газов, чтобы создать молекулярные трубки [24].
Все новые открытия в технологии производства обещают быстрый прогресс в этой области. Например, недавно исследовательская группа ученых из нескольких университетов США создала сверхпрочную гибкую ленту, состоящую из пучков многослойных углеродных нанотрубок [25]. Была синтезирована матрица из волокон многослойных нанотрубок, расположенных в одном направлении, методом химического осаждения пара, используя ферроцен и ксилен в качестве "сырья". Получилась однородная волокнистая масса, состоящая непосредственно из нанотрубок, с пористостью около 87%. Новый материал можно использовать в качестве каната в космическом лифте, в одежде нового поколения и т.п.
Для предлагаемого изобретения необходимо продолжить исследования по получению длинных волокон из калиброванных нанотрубок с внутренним диаметром 14,5 нм. В настоящее время в этой области работают сотни фирм. Налицо все научные, технические и технологические предпосылки для создания промышленного производства крупнотоннажного объема нановолокон для создания сверхпрочных канатов и материалов при стоимости 1-2 доллара США за грамм. При такой стоимости, для всех вариантов предлагаемого изобретения, на 1 км пути потребуется порядка 10 кг каната, т.е., 10-20 тысяч долларов США. Это значительно ниже, как минимум, на 1-2 порядка, себестоимости 1 км пути всех традиционных наземных транспортных систем.
В промышленности выпускается большой класс линейных электродвигателей и линейных шаговых электродвигателей. Хорошо разработаны технологии их производства и систем управления на основе сильноточных полупроводниковых приборов. Удельная мощность этих двигателей составляет порядка 1 кВт/кг. Известно, что значительное уменьшение удельного веса можно добиться, если использовать низкотемпературные сверхпроводники, имеющие большие магнитные поля 3-5 Тл. Уменьшение веса осуществляется за счет отказа от стальных магнитопроводов и уменьшения веса конструктивных элементов. Одновременно исключаются омические потери в проводниках. Для мощных сверхпроводящих двигателей можно достичь удельной мощности до 10кВт/кг при КПД, близком к единице. Это в несколько раз выше удельной мощности, характерной для авиационных турбореактивных двигателей.
Переход на высокотемпературные сверхпроводники позволит в принципе отказаться от криогенных систем охлаждения, что резко упростит конструкцию двигателя и его конструктивных элементов. В линейных двигателях можно использовать намоточные провода, аналогичные канатам из калиброванных нанотрубок, имеющих электрическую изоляцию.
В качестве транспортных модулей для 2D авиации в качестве базовой модели можно взять планер «ЭКИП». Разработка этого летательного аппарата достаточно продвинута и имеет все необходимые аэродинамические качества. В этом планере исключаются воздушная подушка, турбореактивные двигатели, топливная система. Вспомогательные турбореактивные насосы, формирующие ламинарные воздушные потоки, можно заменить на электротурбины на основе материала с высокой электропроводностью. Для пассажирского варианта достаточно использовать модули с полетным весом до 10 т (50-60 пассажиров), а для грузоперевозок можно использовать модули с полетным весом до 75 т. Ограничения связаны с международными стандартами транспортных перевозок (масса двух 20 футовых контейнеров – 44 т, одного 40 футового контейнера – 30,5 т).
При себестоимости 1 км нановолоконного каната 20-30 тыс. долларов США и себестоимости 1 анкерной опоры и ее установки порядка 45 тыс. долларов, себестоимость пути в одном направлении с расстояниями между опорами 10 км составит порядка 25-35 тыс. долларов США на 1 км пути. Это, как минимум, в 100 раз дешевле любой высокоскоростной наземной транспортной системы. Т.е., переход на строительство пути на основе дорогих материалов, но имеющих уникальные качества – в 460 раз прочнее и легче стали, позволяет практически во столько же раз уменьшить себестоимость пути.
Рассчитаем альтернативные железным дорогам перевозки грузов на основе 2D авиации при максимально возможной скорости и грузоподъемности железных дорог.
Полный взлетный вес P0 -75 т,
Грузоподъемность – 50 т,
Крейсерская скорость полета – 300 км/ч,
Размах крыльев – 15 м,
Нагрузка на крыло – 150 кг/м2,
Аэродинамическое качество – 10-15
Транспортный модуль можно изготавливать из легких композитных материалов на основе углеродных нанотрубок, что резко уменьшает вес модуля.
Минимально необходимая скорость движения для подъема груза определяется из формулы (2), преобразованной к виду:
 , (10)
, (10)
где rв – плотность воздуха у земли, g – ускорение свободного падения, S – площадь крыла, cy – аэродинамический коэффициент, определяющий подъемную силу, который изменяется в зависимости от геометрии крыла для разных режимов полета от 0,4 до 2,5.
Для крейсерской скорости и тонкого крыла площадью 500 м2 cy =0,4. Тогда минимальная скорость составит 272 км/ч. Чтобы уменьшить площадь землеотвода, сохранив при этом грузоподъемность и площадь крыла, необходимо использовать планер в виде триплана (см. Фиг.5).
Необходимая мощность двигателя, следовательно, энергия, затрачиваема на полет Px, будет определяться лобовым сопротивлением по формуле (3). При каплевидном виде корпуса cx = 0,04, площадь сечения Sx= 11,25 м2. Для тонкого крыла cx = 0,075 и Sx= 6,25 м2 . Тогда при скорости 300 км/ч мощность двигателя Px составит 343 кВт. На преодоление 1000 км модуль затратит 3,33 ч, т.е., потребуется 1142 кВт ч, или 388 кг условного топлива. Т.е, на 1 т перевозки полезного груза на 1000 км потребуется 7,6 кг условного топлива.
В результате мы видим, что 2D авиация является более экономичным транспортом, чем современные железные дороги. При этом скорость перевозок практически возрастает с 80 км/ч до 300 км/ч.
Поясним, каким образом в 2D авиации при постановке железнодорожного вагона на «крыло» скорость перевозки возрастает в 3,8 раза, а энергозатраты остаются эквивалентными энергозатратам железнодорожного транспорта (80 км/ч) (см. Табл.1). Это связано с тем, что энергозатраты на преодоление трения качения в системе колесо/рельс оказались соизмеримыми с энергозатратами на преодоление аэродинамического сопротивления транспортного модуля 2D авиации [26]. Это достигнуто за счет его аэродинамической оптимизации, применения линейных электродвигателей с высоким 95% кпд тяги и новых композиционных материалов. При этом полезная нагрузка модуля достигает 70% взлетного веса, что в 2,5 раза выше, чем у самолетов.
Основной проблемой транспортных систем в Европе является землеотвод и экологические требования к ним.
Поэтому, другим вариантом реализации является создание транспортных трасс 2D авиации вдоль автомагистралей или создание энерго-транспортных трасс взамен высоковольтных линий электропередач.
2D авиация автоматически решает обе эти проблемы. Располагать транспортную структуру можно непосредственно над скоростными автомагистралями, например, можно использовать небольшие пассажирские летельные аппараты типа «ЭКИП» (см. Фиг.3). Тогда можно будет переключить транспортный поток с движения по земле на движение по воздуху. Автомобили вместе с пассажирами можно будет перевозить в специальных контейнерах, размещенных в транспортных модулях. Это аналогично перевозкам автомобилей с пассажирами в специальных контейнерах по железной дороге со скоростью до 180 км/ч, что рассматривается в проектах транспортных систем AutoShuttle, Autran и AVT-TRAIN [27]. В 2D авиации скорость перевозки значительно выше и достигает 300 км/ч.
Согласно нашим расчётам - это, во-первых, дешевле, чем ехать на той же машине по дороге, во-вторых, это быстрее — 300 км/час, в-третьих — экологически чисто, а в четвёртых — безопасно и нет пробок. В один транспортный модуль может вмещаться 4-6 легковых автомобилей плюс салон для пассажиров со всеми удобствами (см. Фиг.4). Себестоимость перевозки одного автомобиля будет не выше стоимости бензина, необходимо для проезда автомобиля на тоже расстояние.
В развитых странах с высокой плотностью населения, как правило, электроэнергия подводится к городам по высоковольтным линиям передач. Сама процедура выделения земельных участков под линии электропередач давно закончена. Избежать длительного процесса выделения земельных участков возможно за счет объединения функций передачи электроэнергии и трассы 2D авиации. В этом случае мы имеем возможность осуществить достаточно удобный доступ к центрам городов для 2D авиации.
Опоры для 2D авиации легко использовать для прокладки линий электропередач без потерь на основе сверхпроводящего кабеля более 1 ГДж на одну линию. В этом случае можно сэкономить до 10% передаваемой электроэнергии.
Другим вариантом объединения энерго транспортных систем является ввод в города трасс 2D авиации над железнодорожными линиями. Здесь также можно непосредственно передавать большие объемы электроэнергии.
Отсюда следует, что существуют все предпосылки для промышленной реализации транспортной системы 2D авиация.
Для технической реализации космического лифта (см Фиг. 11) существует более сложная технологическая проблема, связанная с необходимостью использования существующей ракетно-космической техники для натягивания каната. В настоящее время эта проблема разрабатывается несколькими фирмами типа LiftPort и HighLift и исследовательскими институтами под руководством NASA [11]. В качестве транспортного модуля в космическом лифте можно использовать космические планеры типа Шатл или Буран. Это увеличивает надежность лифта, так как при обрыве каната модуль может приземлиться автономно. Полетный вес их уменьшается за счет отсутствия топлива и уменьшения мощности реактивного двигателя. Двигатель необходим только для аварийной посадки модуля.
Электромагнитный лифт может находиться в шахте или на эстакаде (см. Фиг. 12). Движение будет осуществляться по сверхпроводящим канатам с использованием магнитной левитации. Линейные сверхпроводящие электродвигатели устанавливаются в движущемся модуле лифта. Канаты будут периодически закрепляться на стенках шахты/башни. Упрощенные варианты электромагнитного лифта можно использовать для создания скоростных лифтов в небоскребах, для перемещения грузов.
Принцип магнитной левитации можно использовать для модернизации существующих железнодорожных транспортных систем. Наиболее просто можно реконструировать уже существующие электрофицированные железные дороги путем дополнительной прокладки по рельсу высокотемпературного сверхпроводящего каната. Это можно осуществить простым и дешевым способом путем фрезеровки небольшой канавки 1-10 мм в головке рельса, в которую закладывается канат. Процесс фрезерования можно легко сделать непосредственно на уже установленных рельсах. В подвижном составе колесные тележки заменятся на линейные электродвигатели на высокотемпературных сверхпроводниках. Реконструкции электросети не требуется. В результате мы получим очень дешевый аналог системы Маглев, полностью исключив проблему трения колеса о рельс. Кроме того, по модернизированной железной дороге можно будет осуществлять и обычное традиционное передвижение на колесах. Железная дорога приобретет новые качества – увеличится скорость в 1,5 -2 раза, уменьшится износ трассы и колес, возрастет угол наклона транспортного пути, что упростит строительство дорог в горах, и особо важно – упростит переход с одной ширины колеи на другую и исключит шум и вибрацию, что весьма актуально для пассажирских перевозок и метро.
Таким образом, использование нанотехнологий для создания сверхпрочных сверхпроводящих проводников (канатов) позволяет создать принципиально новые транспортные системы на магнитной левитации, которые полностью решают скоростную транспортировку пассажиров и грузов на земле, в воздухе и космосе при увеличении безопасности, экологичности и уменьшении себестоимости.
Литература
1. Транспорт: Наука, Техника, Управление. Сборник обзорной информации. ВИНИТИ, 1995, №9.
2. Машиностроение. Энциклопедия. Самолеты и вертолеты. Т.IV-21/К.Ф. Фролова. Изд. М. Машиностроение. 2002.
3. http://www.khsu.ru/fly/trans_problem.shtml#2
4. Петренко О.С. Подвесные рельсовые дороги. М. Машиностроение. 1981.
5. Грушевич А.Е. Автомобили: Теория: Учебник для вузов. Мн.: Высшая школа, 1986. Стр.93.
6. Патент RU 2080268С1
7. Какурин В.К. Проектирование висячих и вантовых мостов. М. Транспорт. 1971.
8. Глазунов А.А. Работа и расчет проводов и тросов. Т.1. Основы механической части воздушной линии электропередачи. Л.М. Госэнергоиздат. 1956.
9. Машины непрерывного транспорта/Павинский В.И. М. Машиностроение. 1969.
10. Edwards, B. C., Design and Deployment of a Space Elevator, Acta Astronautica , 2000, 47 no. 10, page 735-744. Смотрите также сайт автора http://www.bradleyedwards.info/BCE_resume.pdf
11. http://www.isr.us/Downloads/niac_pdf/contents.html,
12. Юрий Арцутанов, “В космос на электровозе”, Комсомольская правда. 31.07.1960 г.
13. Дж.Барбер. Электромагнитная рельсовая пушка», Ф.Хилтон. «Космический электромагнитный транспорт – теория и история. http://sakramento3.narod.ru/zerkalo/uskor.htm.
14. Транспорт с магнитным подвесом/ Ю.А. Бохвалов, В.И. Богаров и др. М. Машиностроение. 1991. 320 с.
15. Авиация: Энциклопедия / Гл. ред. Г.П. Свищев. М.: БРЭ, 1994. 736 с.
16. Белавин Н.И. Экранопланы. Ленинград. Судостроение. 1977.
17. Патенты RU 2015941, 2011542, 2033945, http://www.ekip-aviation-concern.com/rus-b/10.shtml
18. Экономическиеперспективы. Том 5. Электронный журнал Государственного департамента США № 3. октябрь 2000 г. http://www.infousa.ru/economy/ijee1000.htm.
19. Авт свид. CCCР № 35209.
20. US Patent 5,535, 963.
21. US Patent 6,570,224 B1
22. Patent JP6227806, US 6,203,864, CN1598971, Patent Application US 2005106093.
23. Guo-meng (Peter) Zhao. The resistive transition and Meissner effect in carbon nanotubes: Evidence for quasi-one-dimensional superconductivity above room temperature. http://www.superconductors.org/roomnano.pdf
24. Гусев А.И. Наноматериалы, наноструктуры, нанотехнологии. 2005. Изд-во: Физматлит. 416 с.
25. http://www.sciencerf.ru/client/fcntp.aspx?ob_no=1806&cat_ob_no=562 , Science.
26. Д. П. МАРКОВ, Коэффициенты трения и сцепления при взаимодействии колес с рельсами. Вестник ВНИИЖТ, 2005, № 4.
27. http://www.membrana.ru/articles/technic/2002/04/18/114500.html
Формула изобретения
1. Канатная транспортная система, включающая по крайней мере один транспортный модуль с приводным устройством в виде электродвигателя с токосъемными элементами и по крайней мере два закрепленных на опорах, электропроводящих каната, которые в свою очередь подключены к источнику электроэнергии, и с помощью которых осуществляется движение транспортного модуля, отличающаяся тем, что транспортный модуль выполнен в виде летательного аппарата тяжелее воздуха с аэродинамическим качеством не менее 5, электропроводящие канаты выполнены из сверхпрочного легкого проводника и/или сверхпрочного легкого высокотемпературного сверхпроводника, электродвигатель выбран линейным для обеспечения создания в канатах электродвижущей силы, создающей одновременно силу тяги и магнитный подвес (левитацию) во время движения летательного аппарата вдоль канатов, причем каждый электропроводящий канат проходит через область максимума электромагнитного поля внутри линейного электродвигателя.
2. Система по п.1, отличающаяся тем, что канаты натянуты на опоры с усилием, когда предел прочности равен 0,1-0,5, а сечение канатов выбрано таким, что они не разрушаются в условиях создания предельной силы в режиме разгона/экстренного торможения летательного аппарата.
3. Система по п. 2, отличающаяся тем, что опоры расположены периодически на всем протяжении пути транспортной системы в соответствии с рельефом местности, радиусом поворота пути и пропускной способностью транспортной системы, при этом опоры выполнены с возможностью выдерживать нагрузку, равную сумме статического веса летательного аппарата и нагрузки, развиваемой в режиме экстренного торможения летательного аппарата.
4. Система по п.п. 2, 3 отличающаяся тем, что в пунктах назначения пути (портах) канаты закреплены на жестком основании, выполненном из материала, способного выдерживать статическую и динамическую нагрузки, вызванные летательным аппаратом, а длина жесткого основания определяется длиной пути, необходимой для служебного торможения/разгона летательного аппарата.
5. Система по п.1 отличающаяся тем, что обмотки линейных электродвигателей выполнены из проводника и/или высокотемпературного сверхпроводника, причем питание к двигателям поступает непосредственно от электропроводящих канатов, через токосъемные элементы.
6. Система по п.2, отличающаяся тем, что канаты выполнены на основе волокон из углеродных нанотрубок с внутренним диаметром в диапазоне 12 нм -16 нм.
7. Система по п.2, отличающаяся тем, что канаты выполнены на основе волокон из легированных нанотрубок из оксидов или широкозонных полупроводников с внутренним диаметром в диапазоне 12 нм – 16 нм
8. Система по п.1, отличающаяся тем, что до или после линейных электродвигателей летательного аппарата расположены электромагнитные устройства гашения вибрации канатов, которые связаны посредством электромагнитного поля с канатами и соединены с электронными датчиками вибрации канатов.
9. Система по п.п.1,2, отличающаяся тем, что канаты периодически по всей длине соединены между собой перемычками-виброгасителями.
10. Система по п.п.1,3, отличающаяся тем, что канаты закреплены на опорах с помощью шлюзовых устройств.
11. Система по п.10, отличающаяся тем, что шлюзовые устройства закреплены на виброгасителях, которые, в свою очередь, закреплены на опорах.
12. Система по п.10, отличающаяся тем, что шлюзовые устройства жестко связаны с канатом.
13. Система по п.10 отличающаяся тем, что шлюзовые устройства связаны с канатом с помощью электромагнитного поля, формируемого дополнительным электромагнитом и управляемого дистанционно.
14. Способ работы канатной транспортной системы по п. 1-13, заключающийся в том, что с электропроводящих канатов через токосъемные элементы поступает электроэнергия на линейные электродвигатели, отличающийся тем, что линейные электродвигатели одновременно создают силу тяги и магнитный подвес (левитацию) транспортного модуля, выполненного в виде летательного аппарата, причем летательный аппарат движется по канатам со скоростью, необходимой для компенсации веса аппарата за счет создания аэродинамической подъемной силы.
15. Способ работы системы по п. 14, отличающийся тем, что движение летательного аппарата осуществляют в режиме самолета или в режиме экраноплана при соответствующей высоте опор и рельефе местности.
16. Способ работы системы по п. 14, отличающийся тем, что натяжение и вибрацию канатов до и после линейных электродвигателей контролируют электронными датчиками дистанционного контроля вибрации каната и регулируют посредством системы управления электромагнитными устройствами гашения вибрации канатов.
17. Способ работы системы по п. 14, отличающийся тем, что разгон и торможение летательного аппарата осуществляют с ускорением, соответствующим международным стандартам для пассажирских и грузовых перевозок, а аварийное торможение осуществляют с использованием реверса силы линейных электродвигателей и/или изменением аэродинамики и/или в экстренных случаях путем открытия тормозного парашюта.
18. Канатная транспортная система, включающая по крайней мере один транспортный модуль с приводным устройством в виде электродвигателя с токосъемными элементами и натянутого вертикально сверхпрочного легкого каната между поверхностью планеты и ее искусственным спутником, находящимся на синхронной орбите, по которому осуществляет движение транспортный модуль за счет бортового источника электропитания, отличающаяся тем, что транспортный модуль выполнен в виде космического летательного аппарата, между поверхностью планеты и ее искусственным спутником натянуты по крайней мере два электропроводящих каната, которые выполнены из сверхпрочного легкого проводника и/или сверхпрочного легкого высокотемпературного сверхпроводника, и которые подключены к внешнему источнику электрической энергии, электродвигатель выбран линейным для обеспечения создания в канатах электродвижущей силы, создающей одновременно силу тяги и магнитный подвес (левитацию) во время движения космического летательного аппарата вдоль канатов, причем каждый электропроводящий канат проходит через область максимума электромагнитного поля внутри линейного электродвигателя.
19. Система по п.18, отличающаяся тем, что канаты натянуты на опоры с усилием, когда предел прочности равен 0,1-0,5, а сечение канатов выбрано таким, что они не разрушаются в условиях создания предельной силы в режиме разгона/торможения космического летательного аппарата.
20. Система по п.18 отличающаяся тем, что обмотки линейных электродвигателей выполнены из проводника и/или высокотемпературного сверхпроводника, причем питание к двигателям поступает непосредственно от электропроводящих канатов, через токосъемные элементы.
21. Система по п.18, отличающаяся тем, что канаты выполнены на основе волокон из углеродных нанотрубок с внутренним диаметром в диапазоне 12нм -16 нм.
22. Система по п.18, отличающаяся тем, что канаты выполнены на основе волокон из легированных нанотрубок из оксидов или широкозонных полупроводников с внутренним диаметром в диапазоне 12 нм – 16 нм
23. Система по п.18, отличающаяся тем, что до или после линейных электродвигателей космического летательного аппарата расположены электромагнитные устройства гашения вибрации канатов, которые связаны посредством электромагнитного поля с канатами и соединены с электронными датчиками вибрации канатов.
24. Система по п.п.18,19, отличающаяся тем, что канаты периодически по всей длине соединены между собой перемычками-виброгасителями.
25. Способ работы канатной транспортной системы по п. 18-24, заключающийся в том, что с электропроводящих канатов через токосъемные элементы поступает электроэнергия на линейные электродвигатели, отличающийся тем, что линейные электродвигатели одновременно создают силу тяги и магнитный подвес (левитацию) транспортного модуля, выполненного в виде космического летательного аппарата, причем космический летательный аппарат движется с заданной скоростью по канатам за счет создания линейными электродвигателями силы тяги, которая компенсирует вес аппарата и аэродинамическое сопротивление воздуха в околоземном пространстве.
26. Способ работы системы по п. 25, отличающийся тем, что натяжение и вибрацию канатов до и после линейных электродвигателей контролируют электронными датчиками дистанционного контроля вибрации каната и регулируют посредством системы управления электромагнитными устройствами гашения вибрации канатов
27. Способ работы системы по п. 25, отличающийся тем, что разгон и торможение космического летательного аппарата осуществляют с ускорением, соответствующим международным стандартам для пассажирских и грузовых перевозок, а аварийное торможение осуществляют с использованием реверса силы линейных электродвигателей.
28. Канатная транспортная система, включающая по крайней мере один транспортный модуль с приводным устройством в виде электродвигателя с токосъемными элементами и по крайней мере два закрепленных на жестком основании вертикально или под углом между пунктами движения, электропроводящих канатов, которые в свою очередь подключены к источнику электроэнергии, и с помощью которых осуществляется движение транспортного модуля, отличающаяся тем, что электропроводящие канаты выполнены из проводника и/или высокотемпературного сверхпроводника, электродвигатель выбран линейным для обеспечения создания в канатах электродвижущей силы, создающей одновременно силу тяги и магнитный подвес (левитацию) во время движения транспортного модуля вдоль канатов, причем каждый электропроводящий канат проходит через область максимума электромагнитного поля внутри линейного электродвигателя.
29. Система по п.28, отличающаяся тем, что канаты по всей длине механически прикреплены к жесткой поверхности, вдоль которой осуществляется движение подвижного модуля.
30. Система по п.28 отличающаяся тем, что обмотки линейных электродвигателей выполнены из проводника и/или высокотемпературного сверхпроводника, причем питание к двигателям поступает непосредственно от электропроводящих канатов, через токосъемные элементы.
31. Система по п.28, отличающаяся тем, что канаты выполнены на основе волокон из углеродных нанотрубок с внутренним диаметром в диапазоне 12 нм -16 нм.
32. Система по п.28, отличающаяся тем, что канаты выполнены на основе волокон из легированных нанотрубок из оксидов или широкозонных полупроводников с внутренним диаметром в диапазоне 12 нм – 16 нм.
33. Способ работы канатной транспортной системы по п. 28-32, заключающийся в том, что с электропроводящих канатов через токосъемные элементы поступает электроэнергия на линейные электродвигатели, отличающийся тем, что линейные электродвигатели одновременно создают силу тяги и магнитный подвес (левитацию) транспортного модуля, который движется по жестко закрепленным канатам с постоянной скоростью или постоянным/переменным ускорением.
34. Способ работы системы по п. 33, отличающийся тем, что разгон и торможение транспортного модуля осуществляют с ускорением, соответствующим международным стандартам для пассажирских и грузовых перевозок, а аварийное торможение осуществляют с использованием реверса силы линейных электродвигателей.
35. Способ работы системы по п. 33 отличающийся тем, что разгон транспортного модуля осуществляют с ускорением до скорости, которая не превышает максимальную скорость 15,9 км/с.
36. Способ работы системы по п.п. 1, 18, 28, отличающийся тем, что в режиме эксплуатации электромагнитные параметры как линейного электродвигателя так и канатов не превышают критические значения: плотность тока не превышает величину  , где
, где  А/см2 – критический ток в высокотемпературном сверхпроводнике с критической температурой 93,5 градусов Цельсия; магнитное поле в линейном электродвигателе не превышает величину
А/см2 – критический ток в высокотемпературном сверхпроводнике с критической температурой 93,5 градусов Цельсия; магнитное поле в линейном электродвигателе не превышает величину  , где
, где  Тл – критическое поле в высокотемпературном сверхпроводнике с критической температурой 93,5 градусов Цельсия.
Тл – критическое поле в высокотемпературном сверхпроводнике с критической температурой 93,5 градусов Цельсия.
37. Способ работы системы по п.36 отличающийся тем, что максимальная эксплуатационная температура работы линейного электродвигателя и канатов связана с критической плотностью тока и не превышает 60-80 градусов Цельсия.
Рисунки

Фиг. 1. Принцип действия 2D авиации.

Фиг. 2. Схема трассы 2D авиации
Фиг. 3. Пассажирский транспортный модуль в виде самолета крыла

Фиг. 4. Грузо-пассажирский транспортный модуль в виде самолета крыла

Фиг. 5. Грузовой транспортный модуль для перевозки контейнеров в виде самолета триплана.

Фиг. 6. Схема линейного электродвигателя транспортного модуля в момент прохождения шлюза.

Фиг. 7. Конструкция анкерной опоры.
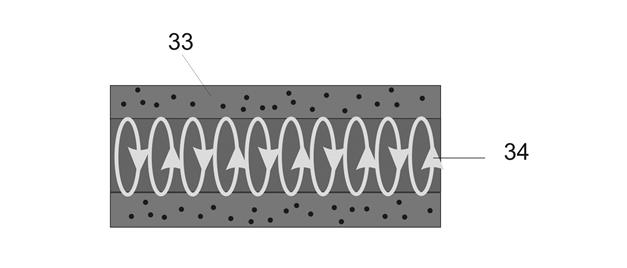
Фиг. 8. Сверхпроводящая легированная нанотрубка для изготовления канатов.

Фиг. 9. Критический режим полета транспортного модуля при боковом ветре.

Фиг.10. Аварийный спуск транспортного модуля

Фиг.11.Схема космического лифта.

Фиг.12. Схема электромагнитной катапульты.
|
из
5.00
|
Обсуждение в статье: Промышленная применимость |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы