 |
Главная |


Метод сопротивления, потенциометры.
|
из
5.00
|
В методах сопротивления используется зависимость электрического сопротивления резисторов от различных нсэлектрических величин. Сопротивление Rрезистора зависит от многих факторов, в частности, от давления, температуры окружающей среды, деформации и длины резистора. Рассмотрим метод, основанный на изменении омического сопротивления проволочного реостата при перемещении скользящего контакта под действием измеряемой величины (рисунок1.1).Входной величиной преобразователя является угловое линейное перемещение движка, выходной-изменение его сопротивления.
Реостат состоит из каркаса, на который намотан провод, изготовленный из материала с высоким удельным сопротивлением, и токосъемного движка. Движок касается провода. Для обеспечения электрического контакта с подвижным движком в месте касания обмотка зачищается от изоляции. Обмотка делается обычно из манганина, константана, фехраля.
При перемещении контакта величина сопротивления будет изменяться. Если Х-координата контакта, то:
 (1.1)
(1.1)
где
 - сопротивление на единицу длинны реостата:
- сопротивление на единицу длинны реостата:
 - постоянная часть сопротивления, соответствующая х=0.
- постоянная часть сопротивления, соответствующая х=0.
Коэффициент а, связывающий механическую величину-перемещение и электрическую сопротивление, называется коэффициентом электромеханической связи реостатного преобразователя. Очевидно, чем больше П, тем большей чувствительностью обладает преобразователь. Но слишком большое увеличение а не всегда целесообразно, так как эффективная работа преобразователя определяется не только величиной сопротивления, но и протекающим по сопротивлению током.
В измерительной технике требуются реостатные преобразователи как с линейной так и с нелинейной функцией преобразования. Одним из способов построения преобразователей с нелинейной функцией преобразования является использование каркаса с переменной непрерывно меняющейся высотой. Изготовление такого каркаса более сложно, чем изготовление каркаса с постоянной высотой, Для упрощения технологии прибегают к кусочно-линейной аппроксимации нелинейной функции преобразования. Для каждого интервала перемещения движка Ax, на котором аппроксимирующая функция линейна, высота каркаса постоянна. Каркас преобразователя получается ступенчатым, число ступеней равно числу интервалов кусочно-линейной аппроксимации (рисунок 1.2)

Рисунок 1.1 Схема реостатного преобразователя.
R-омическое сопротивление;
h-перемещение движка.
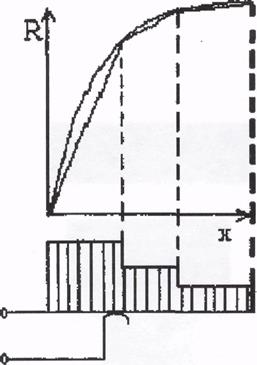
Рисунок 1.2 Зависимость сопротивления от переменной высоты каркаса реостатного преобразователя

Рисунок 1.3 Схема потенциометра R-сопротивление;
h - перемещение движка; Rn – сопротивление нагрузки;
H – сопротивление; i – перемещение движка.
Одним из примеров реостатного преобразователя является потенциометр (рисунок 1.3). Напряжение с движка потенциометра подается на нагрузку. Учитывая технологию изготовления потенциометры бывают проволочные и проводниковые. Источником питания могут служить как переменный так и постоянный ток.
|
из
5.00
|
Обсуждение в статье: Метод сопротивления, потенциометры. |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы