 |
Главная |


Разработка устройства съема информации с гироскопических систем ориентации и навигации на основе эффекта Мессбауэра
|
из
5.00
|
Разработку устройства съема информации с гироскопических систем ориентации и навигации будем осуществлять на основе (описанного ранее смотриподробней 1.2.) эффекта Мессбауэра. Для измерения угла отклонения источника и приемника друг относительно друга будем использовать (смотриподробней1.2.) метод пропускания резонансных  - квантов. Сущность этого метода заключается в том, что если источник и приемник (детектор) - квантов имеют аналогичные энергетические уровни возбуждения, то в детекторе будет наблюдаться резонансное поглощение - квантов. Чувствительность резонансного метода (таблица 2.) обеспечивает высокую точность измерений при минимальном расстоянии (от нуля метров) между источником и детектором.
- квантов. Сущность этого метода заключается в том, что если источник и приемник (детектор) - квантов имеют аналогичные энергетические уровни возбуждения, то в детекторе будет наблюдаться резонансное поглощение - квантов. Чувствительность резонансного метода (таблица 2.) обеспечивает высокую точность измерений при минимальном расстоянии (от нуля метров) между источником и детектором.
Функциональная схема устройства съема информации на основе эффекта Мессбауэра представлена на рисунке 1.14. Для измерения угловых координат возможно использование одного детектора (прямой метод), но для повышения точности информации о положении источника будем использовать два детектора (метод сравнения). Если относительное перемещение источника и детекторов равно нулю (рисунок 1.14) то детекторы зарегистрируют максимальную скорость счета  - квантов, причем эта скорость для обоих детекторов будет одинаковой. При возникновении отклонения между источником и детекторами условия резонанса нарушаются и скорость счета у -квантов на входе детекторов резко снижается, и наблюдается непропорциональное поглощение - квантов в указанных детекторах (скорости счета на детекторах различны). Предполагаем, что такая ситуация возникает в результате того, что излучение от источника происходит не по Ламбертовской поверхности, т.е. в разных направлениях с одинаковой энергией (источник является направленным).
- квантов, причем эта скорость для обоих детекторов будет одинаковой. При возникновении отклонения между источником и детекторами условия резонанса нарушаются и скорость счета у -квантов на входе детекторов резко снижается, и наблюдается непропорциональное поглощение - квантов в указанных детекторах (скорости счета на детекторах различны). Предполагаем, что такая ситуация возникает в результате того, что излучение от источника происходит не по Ламбертовской поверхности, т.е. в разных направлениях с одинаковой энергией (источник является направленным).

Рисунок 1.14 Функциональная схема устройства съема информации с ГСОиН на основе эффекта Мессбауэра
 максимальное значение скорости счета гамма-квантов при резонансном поглощение.
максимальное значение скорости счета гамма-квантов при резонансном поглощение.
 значение скорости счета гамма-квантов при отклонении источника и приемника на
значение скорости счета гамма-квантов при отклонении источника и приемника на  .
.
Рассматриваемый принцип измерения угловых координат основан на амплитудном методе пеленгации. Опишем сначала прямой метод измерения, В этом случае, когда линия визирования на детектор проходит через максимум излучения, на приемнике фиксируется максимальный сигнал:
 (1.27)
(1.27)
гдеk0 - коэффициент пропорциональности;
N(0)- максимальное значение скорости счета  - квантов при нулевом значении угла (
- квантов при нулевом значении угла (  )
)
При отклонении линии визирования от максимума излучения на угол Ар выходной сигнал равен:
 (1.28)
(1.28)
Пеленгационная характеристика, полученная экспериментальным путем и показывающая зависимость скорости счета - квантов от угла отклонения источника и детектора, в общем случае может быть представлена в виде (рисунок 1.15).

Рисунок 1.15 пеленгационнаяхарактеристика.
Математически пеленгационную характеристику можно описать в следующем виде:
 (1.29)
(1.29)
Максимальное значение скорости счета  - квантов N(0) определяется для заданной энергии источника по формуле:
- квантов N(0) определяется для заданной энергии источника по формуле:
 (1.30)
(1.30)
гдеNmax - максимальная скорость счета у -квантов;
R - расстояние между источником и детектором;
 - эффективность детектора (
- эффективность детектора (  0,85);
0,85);
s - эффективная площадь детектора;
а - активность источника;
 - коэффициент ослабления излучения в воздухе ( =0.0073 см-1);
- коэффициент ослабления излучения в воздухе ( =0.0073 см-1);
3.7*1010 - число актов распада в одну секунду.
Для нашей разработки в качестве источника гамма - квантов выбираем ядро 60Со, внедренное в кристаллическую решетку In. Детекторами служат два сцинтилляторных счетчика с кристаллом NaI(Tl). В нашем случае расстояние между источником и детекторами составляет 4.5см. В условиях малых расстояний активность источника должна быть минимальной, поэтому наиболее приемлемой является активность источника а=1*10-10 кюри. Детекторы являются точечной целью, поэтому эффективная площадь детектора 8=0.1см. Детекторы в условиях малых энергий имеют незначительные габариты, и их размещение не создает неудобств. Источник - квантов не требует энергии, и может излучать в течении 5-ти лет, а детекторы потребляют менее 2-х Ватт.
Определим пеленгационную чувствительность измерителя:
 (1.31)
(1.31)
Диаграмму направленности излучения можно аппроксимировать кривой:
 (1.32)
(1.32)
где  - ширина диаграммы на уровне половинной мощности. Тогда:
- ширина диаграммы на уровне половинной мощности. Тогда:
 (1.33)
(1.33)
где 
Для построения пеленгационной чувствительности была разработана программа [смотри приложение]. Результаты работы программы представлены на рисунке1.16.
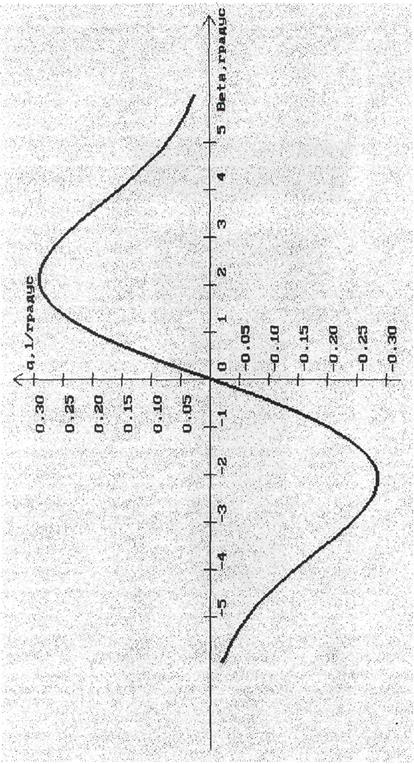
Рисунок 1.6 График пеленгационнои чувствительности
Поскольку работа ГСОиН производится на малых углах (от -1°- 1°), то исходя из полученной пеленгационнои чувствительности видно, что этот участок является линейным участком нелинейной характеристики, следовательно  - устройство будет линейным. Полученная характеристика удовлетворяет требованиям по чувствительности измерителя. Уменьшение угла наклона линейного участка приводит к ухудшению чувствительности, а его увеличение к чрезмерному усилению приводящему к самовозбуждению и увеличению мощности помех.
- устройство будет линейным. Полученная характеристика удовлетворяет требованиям по чувствительности измерителя. Уменьшение угла наклона линейного участка приводит к ухудшению чувствительности, а его увеличение к чрезмерному усилению приводящему к самовозбуждению и увеличению мощности помех.
Увеличение эффективности процесса измерения связано с использованием метода сравнения, что предполагает наличие двух детекторов излучения. Принцип работы устройства, основанного на этом методе, аналогичен приведенному. В условиях резонанса детекторы относительно источника находятся на равносигнальном направлении и сигналы на их входе будут одинаковыми. При отклонении равносигнального направления от максимума на угол  сигналы на детекторах будут разными (рисунок. 1.17). При этом:
сигналы на детекторах будут разными (рисунок. 1.17). При этом:
 - угол отклонения равносигнального положения от максимума;
- угол отклонения равносигнального положения от максимума;
S 1, S 2 - сигналы на первом и втором детекторах. Пеленгационная характеристика, пропорциональная углу отклонения, для метода сравнения имеет вид:
 (1.35)
(1.35)
Разработанное устройство съема информации основывается на методе сравнения энергии сигналов. Устройство измерения угловых координат не является следящим и реализуется при отношении сигнал шум значительно превышающем единицу. Поэтому с выхода схемы сравнения и после усиления полученная информация о величине угла отклонения подается на индикаторы или в систему управления летательным аппаратом (ЛА). Канал управления ЛА не входит в задачу дипломного проекта и поэтому не рассматривается.
Функциональная схема гироскопа для ГСОиН с разработанным устройством представлена на рисунке 1.18.

Рисунок 1.18 Функциональная схема гироскопа для ГСОиН с разработанным устройством.
1 – источник гамма-квантов; 2 – детектор, ДМх, ДМу – датчикимоментов по осям; 3,4 – маятники
ГСОиН в своей структуре содержит гироскоп в кардановом подвесе. Такие гироскопы, в большинстве случаев используются для измерения: 1) курса, 2) углов крена, тангажа, 3) углов поворота объекта. Практически в конструкции гироскопа могут быть предусмотрены специальные моментные устройства (датчики моментов ДМх и ДМу), назначение которых заключается в том, чтобы устанавливать главную ось гироскопа oZ в требуемое положение. Перед запуском главная ось гироскопа должна быть соответствующим образом ориентирована относительно объекта или в пространстве.
При решении задачи начальной ориентации (коррекции) гироскопических систем углы отклонения составляют то -1°-1°. Предположим, что гироскоп в момент пуска ориентирован относительно объекта (ЛА) и является датчиком курсового угла. В силу рассмотренных в подразделе 1.1. свойств гироскоп будет сточностью до вредных уходов сохранять неизменным, направление своейточностью до вредных уходов сохранять неизменным , направление своей главной оси в абсолютном инерциальном пространстве. Если летательный аппарат (ЛА), под действием каких либо причин, изменит, например, угол курса (тангажа и т.д.) по сравнению с заданным, или в силу действия вредных моментов (дрейфа), то происходит угловое перемещение внешней рамки карданового подвеса относительно оси У. Маятник 4 выдает сигнал об этом отклонении и после его усиления подается на датчик моментов по оси X (ДМх), прикладывая момент к внутренней рамке подвеса.
В результате действия момента по оси X датчик вертикали 3 зарегистрирует отклонение. Указанное отклонение составляет 1-10 . После усиления сигнал будет подан на датчик момента по оси У (ДМу), что заставит повернуться внутреннюю рамку в исходное положение. Таким образом рамки карданового подвеса гироскопа будут ориентированы друг относительно друга под углом 90°.
Источники  - квантов внедряем на оси рамок карданового подвеса гироскопа. Источники имеют возможность перемещения относительно детекторов этого излучения. Детекторы, в зависимости от того на какой оси установлены датчики съема информации, закрепляются на корпус гироскопа жестко связанного с летательным аппаратом. Возможно применение устройства съема информации в маятнике.
- квантов внедряем на оси рамок карданового подвеса гироскопа. Источники имеют возможность перемещения относительно детекторов этого излучения. Детекторы, в зависимости от того на какой оси установлены датчики съема информации, закрепляются на корпус гироскопа жестко связанного с летательным аппаратом. Возможно применение устройства съема информации в маятнике.
|
из
5.00
|
Обсуждение в статье: Разработка устройства съема информации с гироскопических систем ориентации и навигации на основе эффекта Мессбауэра |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы