 |
Главная |


Технические средства автоматизации систем управления гибких автоматизированных производств
|
из
5.00
|
Исходные данные.
1. Рабочий эскиз крышки подшипникового узла.
2. Геометрические параметры:
М=5х1;
ZMW=90мм;
диаметр фрезы dфр=210 мм;
размеры стола станка ХС=350 мм; YС=240 мм; ZС=390 мм;
значение шага интерполяции h=0,9 мм;
а также H=115мм; L=160мм; t=20мм;
l=150мм; b=50мм; d=35мм;
z1=55мм; z2=45мм; a=120
Разработка робототехнического комплекса и управляющей программы процесса сверления для изготовления крышки подшипникового узла.
Анализ эскиза показывает, что деталь имеет 3 отверстия Æ 4,2 мм и одно Æ 45 мм. Внешний контур детали имеет участок криволинейной поверхности. Чтобы изготовить деталь, нужен процесс фрезерования и процесс сверления, поэтому обработку целесообразно проводить на сверлильно-фрезерном расточном станке.
3.5.1 Выбор системы координат станка, детали и инструмента

ХMF=ХC/2=90мм
YMF=YC/2=80мм
ZFN=ZC=450мм
Рис 1. Выбор системы координат станка
 XMW=XMF-l/2=175-80=95 мм
XMW=XMF-l/2=175-80=95 мм
YMW=YMF-H/2+h=120-70+5=55 мм
(l=160 мм, H=140 мм, h=5 мм)
Рис 2. Выбор системы координат детали

Рис 3. Выбор системы координат инструмента
3.5.3. Выбор типовых переходов операций сверления
а) центрирование:

б) сверление 1:

сверление 2:

в) нарезание резьбы:


Рис 4. Выбор типовых переходов операции сверления
3.5.2 Составление эскиза процесса сверления
На основе выбранных типовых переходов и с условием размещения заготовки на столе стоставляем эскиз технологического процесса сверления.
Значения координат опорных точек
| № | Координаты опорных точек | ||||
| ХД, мм | YД, мм | ХС, мм | YС, мм | ZС, мм | |
| 1 | 54 | 25 | 79 | 35 | 210 |
| 2 | 132 | 70 | 157 | 80 | 210 |
| 3 | 54 | 115 | 79 | 125 | 210 |
| 4 | 80 | 70 | 105 | 80 | 210 |
ХД=80-52*sin30=54 мм
YД=70-52*cos30=25 мм
3.5.3 Кодирование управляющей программы процесса сверления
% LF
N1 G60 T0101, LF
N2 F40, S500, M06, LF
N3 G59 X25, Y10, Z210, LF
N4 X54, Y25, LF
N5 G82, R2, Z-3, LF
N6 X132, Y70, LF
N7 X54, Y115, LF
N8 G80 T0202, LF
N9 F100, S1400, M06, LF
N10 X54, Y25, LF
N11 G83 R2, Z-18, LF
N12 Z-32, F80, LF
N13 X132, Y70, Z-18, F100, LF
N14 Z-32, F80, LF
N15 X54, Y115, Z-18, F100, LF
N16 Z-32, F80, LF
N17 G80 T0404, LF
N18 F60, S360, M06, LF
N19 X80, Y70, LF
N20 G81 R2, Z-35, LF
N21 G80 T0505, LF
N22 F250, S250, M06, LF
N23 X54, Y25, LF
N24 G84 R2, Z-30, LF
N25 X132, Y70, LF
N26 X54, Y115, LF
N27 G80 G59 X0, Y0 , Z0, M09, LF
N28 G00 X0, Y0, Z390, M00, LF
Последовательность переходов операции сверления
| Переход | Номер отверстия | Схема рис.4 | Участок траектории | S, мм/мин | n, об/мин |
| Центриро-вание | 1,2,3 | а | 1-2 | 40 | 500 |
| Сверление | 1,2,3 | б1 | 1-2, 2-3 | 100, 80 | 1400 |
| Нарезание резьбы | 1,2,3 | в | 1-2 | 25 | 25 |
| Сверление | 4 | б2 | 1-2 | 60 | 360 |



3.6 Связь контроллера с ЭВМ верхнего уровня
(IBM PC)
В автоматизированной управления асинхронным двигателем, для которой разрабатывался рассматриваемый в данном дипломном проекте модуль ввода аналоговых сигналов, связь контроллера осуществляется через последовательный канал связи. При этом используется принятый фирмой IBM интерфейс RS-232C.
3.6.1 Схема гальванической развязки приемопередатчика микроконтроллера
Схема гальванической развязки приемопередатчика микроконтроллера предназначена для гальванической развязки линии связи и микроконтроллера, а также для преобразования сигнала передатчика TxD из ТТЛ-уровня в токовый параметр линии связи и сигнала поступающего из линии связи в сигнал RxD приемника ТТЛ-уровня.
Функциональная схема гальванической развязки приемопередатчика микроконтроллера приведенная на рис. , состоит из двух частей: гальванической развязки передатчика (VT1, VT2, VT3, U2, R2, R4, R6, R7) и схемы гальванической развязки приемника (U1, D1.1, R1, R3, R5). Диод VT1 выполняет защитную функцию при неправильной полярности подключения линии связи.
Схема гальванической развязки приемопередатчика работает следующим образом: в исходном состоянии с выхода передатчика TxD микроконтроллера подается уровень "логической единицы" (ТТЛ) на базу ключа VT3 через токоограничительный резистор R7. При этом транзистор VT3 открыт и шунтирует низким сопротивлением перехода коллектор - эмиттер светодиод оптоэлектронной пары U2. Это ведет к тому, что светодиод оптопары U2 не излучает и транзисторный ключ оптопары U2 закрыт. Из этого следует что транзисторный ключ, собранный на элементах VT1 и VT2, открыт током протекающим через резистор R2. В следствии этого линия связи будет закорочена через открытый переход коллектор - эмиттер транзистора VT1 и сравнительно низкое сопротивление R1. При этом на резисторе R1 создается падение напряжения, достаточное для открывания светодиода оптоэлектронной пары U1, что влечет за собой открытие транзисторного ключа оптопары U1. В этом случае на входе логического элемента триггера Шмитта присутствует уровень "логического нуля", а на его выходе - "логическая единица", что соответствует неактивному входному сигналу не входе RxD микроконтроллера.
При приеме информации, что равносильно размыканию линии связи, светодиод оптопары U1 закрывается, а значит и закрывается транзисторный ключ оптопары. На входе логического элемента триггера Шмитта появляется уровень "логической единицы", а на его входе "логический ноль", что соответствует активному сигналу на входе RxD микроконтроллера.
При передаче информации в линию связи уровень "логического нуля" на выходе TxD (что соответствует активному состоянию выхода) ключ на транзисторе VT3 закрывается, а светодиод оптопары U2 открывается вследствие протекания тока через резистор R6. Это приводит к открыванию транзисторного ключа оптопары U2 и, соответственно к закрыванию ключа на транзисторах VT1 и VT2, что соответствует разомкнутому состоянию линии связи.
Исходя из вышеописанного принципа работы модуля гальванической развязки следует отметить, что передаваемые сигналы от контроллера в линию связи будут дублироваться на входе приемника (RxD) микроконтроллера. Это обстоятельство должно быть учтено при программной реализации протокола обмена микроконтроллера с машиной верхнего уровня.
3.6.2 Интерфейс последовательного канала связи ЭВМ
с контроллером
Последовательный интерфейс обычно используется для большинства периферийных устройств, таких как плоттер, удаленный принтер, мышь, внешний модем, программатор ПЗУ и т. д. До настоящего времени для последовательной связи IBM PC-совместимых компьютеров используются адаптеры с интерфейсом RS-232C (Recommended Standart 232 Version C) (новая ревизия - EIA-232D). Описание этого интерфейса было опубликовано Американской промышленной ассоциацией еще в 1969 году. Европейским аналогом RS-232 являются два стандарта, разработанные CCITT (Comite Consultatif Internationale de Telegraphique et Telephonique) - МККТТ (Международный консультативный комитет по телеграфии и телефонии): V.24 (механические характеристики) и V.28 (электрические характеристики). Сегодня эта организация носит название ITU-T. Хотя первоначально RS-232 был предназначен для связи центральной машины с терминалом, его простота и богатые возможности обеспечили ему более широкое применение. В современном IBM PC-совместимом компьютере может использоваться до четырех последовательных портов, имеющих логические имена соответственно COM1, COM2, COM3 и COM4. Базовые адреса портов и соответствующие прерывания приведены в таблице
Таблица
| Обозначение | Диапазон адресов | Прерывание |
| COM1 | 2F8h - 2FFh | IRQ4 |
| COM2 | 3F8h - 3FFh | IRQ3 |
| COM3 | 2E8h - 2Efh | IRQ10(IRQ2) |
| COM4 | 3E8h - 3Efh | IRQ11(IRQ5) |
Следует обратить внимание на тот факт, что использование прерываний IRQ10 и IRQ11 для последовательных портов возможно только на плате ввода-вывода для PC/AT (двойной слот). В компьютере, совместимом с PC/XT, для этой цели можно задействовать только два прерывания (IRQ4 и IRQ3) или использовать, если возможно, прерывание IRQ2 или IRQ5.
В адресном пространстве IBM PC-совместимых компьютеров последовательный адаптер занимает восемь последовательных адресов, включая базовый. Однако через эти восемь адресов происходит обращение к 12 регистрам, которые программируются соответствующим образом (приложение ).
По существу, сердцем последовательного адаптера является микросхема UART (Universal Asynchronous Receiver/Transmitter - универсальный асинхронный приемопередатчик). В IBM PC и PC/XT для этой цели использовалась микросхема типа 8250. После того как в ней были обнаружены ошибки, появились ее версии с буквами A и B. Для PC/AT решено было применить микросхему 16450, которая превосходила по скорости 8250. Улучшенной версией UART 16450 стала микросхема 16550. В настоящее время обычно используется UART 16550A. Данная микросхема имеет 16-символьный буфер на прием и на передачу, и, кроме того, может использовать несколько каналов прямого доступа в память DMA (Direct Memory Access). Другая версия этой микросхемы - 16550AFN.
Стандарт передачи и приема использует высокие уровни сигналов до +/-15 В или +/-12 В. Уровень логического нуля соответствует напряжению +12В, а логической единицы - -12 В. При передаче микросхема UART преобразует параллельный код в последовательный и передает его побитно в линию, обрамляя исходную последовательность битами старта, останова и контроля. При приеме данных UART преобразует последовательный код в параллельный (опуская служебные символы).
Основным преимуществом последовательной передачи является возможность пересылки данных на расстояния 1000 метров. В простейшем случае для приема и передачи через последовательный порт необходимо только три сигнала : TxD (Transmit Data - Передача данных), RxD (Recevive Data - Прием данных) и GND (Ground - "Земля").
В IBM PC-совместимых компьютерах существует два основных типа кабелей для интерфейса RS-232 : 25-сигнальный, изначально предусмотренный стандартом RS-232, и 9-сигнальный, используемый в соответствии с EIA-232D. При использовании последовательного интерфейса одно из устройств выступает как DTE (Data Terminal Equipment - Оконечное оборудование данных), а другое как DCE (Data Communication Equipment - Оборудование для передачи данных). Различие между ними состоит в направлении используемых сигналов. То есть, если сигнал для DTE является входным, то для DCE этот же сигнал будет выходным и наоборот.
Электрические параметры сигналов RS-232C:
Входное напряжение ± 3V ¸ ±15V ;
Входное сопротивление 3kOm ¸ 7kOm ;
Входное напряжение при нагрузке
3¸7 kOm .. 7,5±2,5V.
3.6.3 Организация обмена по последовательному каналу
Протокол информационного канала реализуется при помощи программного обеспечения, зашитого в ПЗУ. Информационный канал придает передаваемому сообщению определенную форму и в соответствии с этой формой упаковывает сообщение при передаче и распаковывает при приеме.
Аналогичную задачу должно решать программное обеспечение абонента.
Сообщение - это оформленная по определенным правилам последовательность байтов, имеющих помимо функционально законченной смысловой части также признак начала и конца сообщения.
Для передачи данных составим протокол обмена между контроллером и ЭВМ по последовательному каналу.
Обмен терминал-контроллер: посылки состоят из 5-ти байт.
1-й байт:
| D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 |
| 1 | 1 | X | X | X | X | X | X |
D7-D6 - признак старт-байта;
D5-D0 - поле команды.
2-й и 3-й байт:
| D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 |
| 0 | 0 | X | X | X | X | X | X |
D5-D0 - 6 битов поля данных.
4-й байт:
| D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 |
| 0 | 0 | X | X | X | X | X | X |
D5-D2 - 4 младших бита старшего байта контрольной суммы (D3-D0);
D1-D0 - 2 старших бита младшего байта контрольной суммы (D7-D6).
5-й байт:
| D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 |
| 0 | 0 | X | X | X | X | X | X |
D5-D0 - 6 младших битов младшего байта контрольной суммы.
Коды команд обмена “терминал-контроллер” помещены в таблицу
| Включить двигатель | 00H |
| Выключить двигатель | 01H |
| Передать состояние 1-го и 2-го датчиков | 02H |
| Передать состояние 3-го и 4-го датчиков | 03H |
| Установить значение разгона (значение содержится в поле данных 2 и 3-го байта команды) | 04H |
| Передать значение тахометра | 05H |
Обмен контроллер-терминал: посылки состоят из 6-ти байт.
1-й байт:
| D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 |
| 1 | 1 | X | X | X | X | X | X |
D7-D6 - признак старт-байта;
D5-D0 - поле команды.
2-й байт:
| D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 |
| 0 | 0 | * | * | X | X | X | X |
D5-D4 - состояние пускателей “пуск” и “стоп”;
D3-D0 - поле данных.
3-й и 4-й байт:
| D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 |
| 0 | 0 | X | X | X | X | X | X |
D5-D0 - поле данных.
5-й и 6-й байт:
| D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 |
| 0 | 0 | X | X | X | X | X | X |
D5-D0 - значение контрольной суммы (аналогично обмену “терминал-контроллер”).
Коды команд обмена “контроллер-терминал” помещены в таблицу
| Данные 1-го и 2-го датчиков | 00H |
| Данные 3-го и 4-го датчиков | 01H |
| Данные разгона двигателя | 02H |
| Данные тахометра | 03H |
Примечание: данные содержатся в упакованном виде со 2-го по 4-й байт посылки в поле данных.
Программа обеспечивающая описанный протокол обмена приведена в приложении
3.6.4 Расчет формы сигнала в линии связи и
скорости обмена
Если генератор вырабатывает фронт посылки с амплитудой [0, +Е] вольт, то кривая тока, протекающего по сопротивлению нагрузки на приемном конце, может быть определена с помощью выражения:

где I - установившееся значение тока в кабеле, А;
где bk - корни промежуточного трансцендентного уравнения;
а - нормированная нагрузка, равная:

 - нормированное по t время;
- нормированное по t время;
 - постоянная времени кабеля.
- постоянная времени кабеля.
Здесь R и С - сопротивление, Ом/км, и емкость, Ф/км одного километра кабеля, l - длина кабеля, км.
Согласно [ ] под Rон можно понимать либо внутреннее сопротивление генератора, либо сопротивление приемника. Однако эксперимент показал, что формулу ( ) можно использовать и для более общего случая. Поэтому общей нагрузкой кабеля будем считать:
Rон=Ro+Rн
Из анализа расчетных кривых построенных по формуле ( следует, что они имеют вид сдвинутых по оси n экспонент с различным наклоном. Некоторое отличие от экспоненциальной формы имеет место лишь в самых нижних частях кривых.
Поскольку при расчетах наиболее существенными являются ее средняя (определяющая наклон фронта) и верхняя (определяющая время нарастания сигнала) части, можно допустить некоторую неточность в воспроизведении нижней части кривой. Это дает возможность найти приближенное выражение для расчета тока в приемнике:
где b - множитель, учитывающий изменение наклона кривой;
d - оператор сдвига, учитывающий смещение кривой.
Воспользуемся формулой для b, полученной с помощью аппроксимирующей функции, в качестве которой выбрана окружность. Получим формулу:

Аналогичным методом получим формулу для d:

Таким образом, поставленная задача решена: получены простые выражения ( )-( ), имеющие замкнутую форму ряда. Ошибка при определении ординат кривой, лежащих в диапазоне (0.4  1.0)I, не превышает 0.015 установившегося значения амплитуды сигнала, которое определяется как:
1.0)I, не превышает 0.015 установившегося значения амплитуды сигнала, которое определяется как:
Если передача ведется двухполярными посылками с амплитудой на передающем конце  Е, как в нашем случае, то формула ( ) запишется в виде
Е, как в нашем случае, то формула ( ) запишется в виде
Вычислим форму сигнала на приемной стороне кабеля, зная, что связь организована с помощью кабеля ТГ, который имеет следующие характеристики:
· погонное сопротивление R=190 Ом/км;
· погонную емкость С=50 нФ/км;
· протяженность l=5 км.
Расчет формы сигнала и скорости обмена производился в Eureka версии 1.0 и приводится ниже.
R=190 ; Сопротивление кабеля, Ом
C=50e-9 ; Емкость кабеля, Ф
l=5 ; Длина кабеля, км
;--------------------------------
E=12 ; Выходное напряжение передатчика
Ro=5 ; Выходное сопротивление передатчика
Rn=100 ; Входное сопротивление приемника
;--------------------------------
Pr=0.95 ; Предел амплитуды на входе
; приемника
;--------------------------------
Ron=Ro+Rn; Общая нагрузка кабеля
a=Ron/R/l; Нормированная нагрузка
b=0.824-sqrt(0.461-(0.405-0.64*a)^2)
; Множитель, учитывающий изменение наклона
;кривой
d=1.932+sqrt(1.574-(1.207-2*a)^2)
; Оператор сдвига, учитывающий смещение
;кривой
I=E/(R*l+Ron) ; Установившееся значение
;амплитуды сигнала на выходе передатчика
Amp=Pr*I ; Амплитуда сигнала на входе при-
;емника
Ta=0.02915*C*R*l^2 ; Постоянная времени кабеля
P=d-ln((I-Amp)/I)/b ; Нормированная дли-
;тельность посылки
Tc=P*Ta ; Длительность посылки
V=1/Tc ; Скорость обмена по линии связи
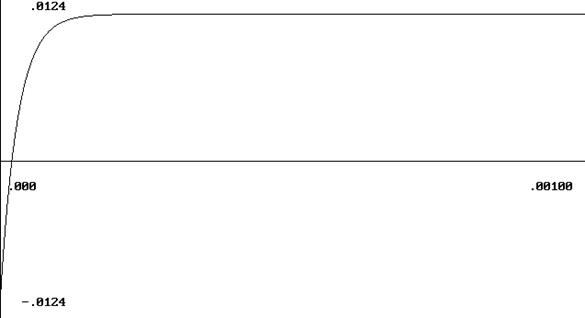
i(t)=I*(1-exp(-b*(t/Ta-d))) ;
Результаты расчета:
Variables Values
a = .11052632
Amp = .010805687
b = .23301088
C = 5.0000000e-08
d = 2.7078272
E = 12.000000
I = .011374408
l = 5.0000000
P = 15.564447
Pr = .95000000
R = 190.00000
Rn = 100.00000
Ro = 5.0000000
Ron = 105.00000
Ta = 6.9231250e-06
c = .00010775461
V = 9280.3453
Скорость модуляции  Бод, что удовлетворяет условиям эксплуатации проектируемого устройства.
Бод, что удовлетворяет условиям эксплуатации проектируемого устройства.
Вид сигнала на стороне приема изображен на рисунке
|
из
5.00
|
Обсуждение в статье: Технические средства автоматизации систем управления гибких автоматизированных производств |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы