 |
Главная |


ОПТИМАЛЬНОЕ ОЦЕНИВАНИЕ СОСТОЯНИЯ
|
из
5.00
|
ФИЛЬТРЫ С ЗАДАННОЙ СТРУКТУРОЙ (ПАРАМЕТРИЧЕСКАЯ ОПТИМИЗАЦИЯ)
Оптимальной среди систем данного класса называют систему, для которой показатель ее качества имеет экстремальное значение (минимум или максимум в зависимости от смысла показателя). Выбранный показатель качества называют, как говорилось выше, критерием оптимальности.
ФИЛЬТРЫ КОЛМОГОРОВА - ВИНЕРА
Основополагающие результаты по теории фильтрации были получены Н. Винером и А.Н. Колмогоровым (1941г.). Ими рассматривались только стационарные случайные процессы. В дальнейшем результаты были обобщены и на классы нестационарных процессов.
Перейдем к изложению основных положений теории фильтров Колмогорова-Винера. Рассмотрим линейную систему, представленную на рисунке

Заданы взаимно не коррелированные центрированные случайные процессы в виде функций времени m ( t ) и n ( t ) с корреляционными функциями
Требуется найти ИПФ  фильтра, оптимальным образом выделяющего реализацию случайного процесса m ( t ) в виде некоторого процесса X ( t ) в условиях, когда на вход поступает аддитивная смесь полезного сигнала m ( t ) и помехи n ( t ).
фильтра, оптимальным образом выделяющего реализацию случайного процесса m ( t ) в виде некоторого процесса X ( t ) в условиях, когда на вход поступает аддитивная смесь полезного сигнала m ( t ) и помехи n ( t ).
Критерием оптимальности является минимум среднеквадратической ошибки (СКО)
Где 
Структурная схема, поясняющая постановку задачи фильтрации в классе линейных систем, представлена на рисунке 6.
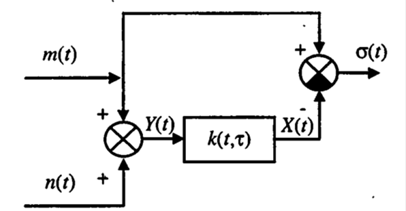
Рис. 6. К постановке задачи фильтрации
Найдём уравнение, определяющее ИПФ оптимальной, в указанном выше смысле, системы. Положим, что при t = 0 фильтр имеет нулевые начальные условия; тогда сигнал ошибки  определяется зависимостью
определяется зависимостью
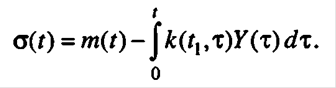 (1.6)
(1.6)
Полученное интегральное уравнение 1-го рода (1.17) определяет оптимальную ИПФ фильтра, обеспечивающего воспроизведение полезного сигнала m( t ) с минимальной СКО.
Уравнение (1.17) называется уравнением Винера - Хопфа, которое часто записывается в виде 
(1.18)
Замечание:
Линейный фильтр является оптимальным для нормальных СП, если сигнал отличен от нормального, оптимальный фильтр следует находить в классе нелинейных систем.
ОПТИМАЛЬНОЕ ОЦЕНИВАНИЕ СОСТОЯНИЯ
Часто желательно иметь возможность оценивания состояния системы на основе данных, которые имеют лишь статистическую связь с этим состоянием и, следовательно, не обеспечивают его точного определения. Например, можно пытаться определить положение или скорость находящегося в воздухе объекта по данным слежения локатора, решить вопрос о виде принятого сигнала в линии связи, если известна совокупность возможных передаваемых сигналов. При этом, естественно, встает вопрос об оптимальности (наилучшей точности) полученных оценок. Для линейных систем в качестве критерия оптимальности выступает минимальная среднеквадратичная ошибка оценивания (восстановления) вектора состояния. Обозначим оценку вектора состояния X в некоторый момент времени 
на основе измерений вектора  на интервале
на интервале  через
через  .В зависимости от того, какая задача оценивания решается, имеют место следующие задачи:
.В зависимости от того, какая задача оценивания решается, имеют место следующие задачи:
а) t1 > t, тогда задача называется прогнозированием, или предсказанием;
б) t1 = t, задача фильтрации (получение текущей оценки);
в) t1 < t, задача сглаживания, или интерполяции.
В дальнейшем нас будет интересовать только задача фильтрации. Для вывода уравнений оптимального фильтра нам нужен вывод дисперсионного уравнения.
Для перехода к построению оптимального фильтра Калмана напомним постановку и решение задачи оптимальной фильтрации в смысле Н. Винера.
Многомерная система определяется как система с i -входами и n-выходами, которые связаны посредством матричной импульсной переходной функции (МИПФ).  . Пусть
. Пусть  - i-мерный вектор входа фильтра а
- i-мерный вектор входа фильтра а  «-мерный вектор выхода. Тогда связь между векторами
«-мерный вектор выхода. Тогда связь между векторами  и
и  определена интегралом
определена интегралом
 (7.49)
(7.49)
Пусть Y(f) - действительный случайный процесс с нулевым математическим ожиданием и корреляционной функцией  . Обозначим норму произвольной квадратной матрицы В через ||В|| и определим ее следующим образом:
. Обозначим норму произвольной квадратной матрицы В через ||В|| и определим ее следующим образом:
(7.50)
Где tr ( Z ) след, т.е. сумма диагональных элементов матрицы Z.
Пусть на вход многомерного фильтра поступает искаженный сигнал как сумма полезного сигнала М( t ) и помехи N( t ), т.е.

(1.51)
где М( t ) и N( t )- i-мерные векторы с известными корреляционными функциями  и
и  .
.
В зависимости от того, какая задача стоит: прогнозирования, фильтрации или сглаживания, определяется МИПФ идеальной системы. В задаче фильтрации  , то есть
, то есть  . При такой постановке задачи минимум среднеквадратичной ошибки определяется МИПФ
. При такой постановке задачи минимум среднеквадратичной ошибки определяется МИПФ  , получаемой из обобщенного уравнения Винера - Хопфа для многомерных систем.
, получаемой из обобщенного уравнения Винера - Хопфа для многомерных систем.
(1.55)
Известно, что если на вход системы поступает случайный сигнал Y( t ), являющийся стационарным, в широком смысле, случайным процессом, оптимальную матричную передаточную функцию  многомерного фильтра можно получить факторизацией рациональной матрицы спектральных плотностей. Р. Калман в своих работах модифицировал постановку задачи многомерной фильтрации Винера, придав ей форму проблемы пространства состояния. В результате такой модификации был получен фильтр Калмана, осуществляющий процедуру рекурсивного оценивания, когда подлежащий оцениванию сигнал является выходным сигналом линейной нестационарной динамической системы.
многомерного фильтра можно получить факторизацией рациональной матрицы спектральных плотностей. Р. Калман в своих работах модифицировал постановку задачи многомерной фильтрации Винера, придав ей форму проблемы пространства состояния. В результате такой модификации был получен фильтр Калмана, осуществляющий процедуру рекурсивного оценивания, когда подлежащий оцениванию сигнал является выходным сигналом линейной нестационарной динамической системы.
Таким образом, структурная схема модели источника сообщений в виде формирующего фильтра и оптимального линейного фильтра, дающего несмещенную оценку с минимальной среднеквадратичной ошибкой дисперсии  , имеет следующий вид
, имеет следующий вид
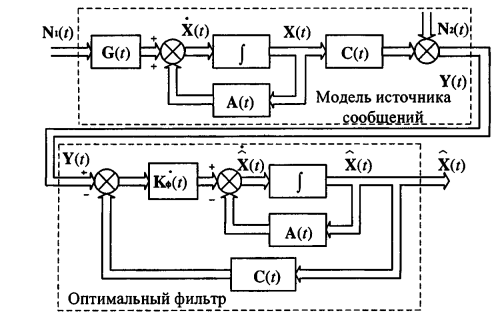
Рассмотренный оптимальный фильтр и его уравнение были впервые получены Р Калманом и Р. Бьюси в 1961 году и носит название фильтра Калмана - Бьюси.
|
из
5.00
|
Обсуждение в статье: ОПТИМАЛЬНОЕ ОЦЕНИВАНИЕ СОСТОЯНИЯ |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы