 |
Главная |


Примеры каждого вида (класса) механизмов
|
из
5.00
|
Функциональная классификация механизмов
Система тел, предназначенная для преобразования движения одного или нескольких тел в требуемые движения других тел, называется механизмом. С точки зрения их функционального назначения механизмы машины делятся на следующие виды:
1. Механизмы двигателей и преобразователей.
2. Передаточные механизмы.
3. Исполнительные механизмы.
4. Механизмы управления, контроля и регулирования.
5. Механизмы подачи, транспортировки, питания и сортировки обрабатываемых сред и объектов.
6. Механизмы автоматического счета, взвешивания и упаковки готовой продукции.
Механизмы двигателей осуществляют преобразование различных видов энергии в механическую работу. Механизмы преобразователей (генераторов) осуществляют преобразование механической работы в другие виды энергии. К механизмам двигателей относятся механизмы двигателей внутреннего сгорания, паровых машин, электродвигателей, турбин и др. К механизмам преобразователей относятся механизмы насосов, компрессоров, гидроприводов и др.
Передаточные механизмы (привод) имеют своей задачей передачу движений от двигателя к технологической машине или исполнительным механизмам. Задачей передаточных механизмов является уменьшение частоты вращения вала двигателя до уровня частоты вращения основного вала технологической машины. Например, редуктор.
Исполнительными механизмами называются те механизмы, которые непосредственно воздействуют на обрабатываемую среду или объект. В их задачу входит изменение формы, состояния, положения и свойств, обрабатываемых среды или объекта. К исполнительным механизмам, например, относятся механизмы прессов, деформирующих обрабатываемый объект, механизмы грохотов в энергозерноочистительных машинах, разделяющих среду, состоящую из зерна и соломы, механизмы металлообрабатывающих станков и т.д.
Механизмами управления, контроля и регулирования называются различные механизмы и устройства для контроля размеров обрабатываемых объектов, например, механические щупы, следующие за фрезой, обрабатывающей криволинейную поверхность, и сигнализирующие об отклонении фрезы от заданной программы обработки; регуляторы, реагирующие на отклонение угловой скорости главного вала машины и устанавливающие нормальную заданную угловую скорость этого вала и т.д. К этим же механизмам относятся и измерительные механизмы по контролю размеров, давления, уровней жидкостей и т.д.
К механизмам подачи, транспортировки, питания и сортировки обрабатываемых сред и объектов относятся механизмы винтовых шнеков, скребковых и ковшевых элеваторов для транспортировки и подачи сыпучих материалов, механизмы загрузочных бункеров для штучных заготовок, механизмы подачи пруткового материала в высадочных автоматах, механизмы сортировки готовой продукции по размерам, весу и конфигурации и т.д.
Механизмы автоматического счета, взвешивания и упаковки готовой продукции применяются в машинах выпускающих массовую штучную продукцию. Эти механизмы могут быть и исполнительными механизмами, если они входят в специальные машины, предназначаемые для этих операций. Например, в машинах для расфасовки чая механизмы взвешивания и упаковки являются исполнительными механизмами.
Несмотря на разницу в функциональном назначении механизмов отдельных видов, в их строении, кинематике и динамике много общего.
Например, механизм поршневого двигателя, механизм кривошипного пресса и механизм привода ножа косилки имеют в своей основе один и тот же кривошипно-ползунный механизм. Механизм привода резца строгального станка и механизм роторного насоса имеют в своей основе один и тот же кулисный механизм. Механизм редуктора, передающего движение от двигателя самолета к его винту, и механизм дифференциала автомобиля имеют в своей основе зубчатый механизм.
Основные элементы эвольвентного зубчатого зацепления: полюс зацепления, общая нормаль и общая касательная, угол зацепления, линия зацепления, ее активная часть, коэффициент перекрытия.
На рисунке показана зубчатая передача внешнего зацепления  w (угол зацепления), полюс зацепления P, межосевое расстояние а w, начальные окружности радиусами rw1 и rw2.
w (угол зацепления), полюс зацепления P, межосевое расстояние а w, начальные окружности радиусами rw1 и rw2.
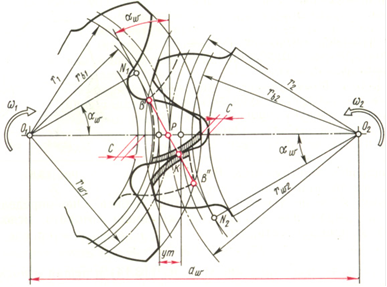
Линия N1 N2 является общей нормалью к эвольвентам и общей касательной к основным окружностям. Таким образом, линию N1 N2 можно рассматривать как геометрическое место точек касания сопряженных профилей. В процессе зацепления, т.е. смены точек контакта прямая N1 N2не меняет своего положения. Этим доказывается первое существенное свойство эвольвентного зацепления.
Эвольвентное зацепление обеспечивает постоянство передаточного отношения в процессе зацепления, т.е.:

Нормаль к любой точке эвольвенты направлена по касательной к основной окружности.
Точка пересечения общей нормали к эквивалентам с межосевой линией (полюс зацепления Р) занимает неизменное положение.
Угол  w - угол между линией зацепленияи прямой, перпендикулярной межосевой линии называется углом зацепления.
w - угол между линией зацепленияи прямой, перпендикулярной межосевой линии называется углом зацепления.
При внешнем зацеплении эвольвентные профили являются сопряжёнными тольков пределах линии зацепления N1 N2.
В точках В’ и B’’ линия зацепления пересекается окружностями вершин зубьев колес; в точке В’ сопряженные профили входят в зацепление, а в точке B’’ - выходят из зацепления. Процесс взаимодействия главных поверхностей сопряженных зубьев происходит на участке В’ B’’ линии зацепления; эта часть линии зацепления называется активной линией зацепления. Зубчатая передача должна быть спроектирована так, чтобы участок В’ B’’ укладывался в пределахлинии зацепления N1 N2. Если точки В’ и B’’ выйдут за эти пределы, то в зубчатой передаче произойдет заклинивание.
При заданном направлении вращения только одна сторона зуба будет передавать и воспринимать усилие; ее называют рабочей стороной (профилем) зуба. В зацеплении участвуют активные профили зубьев, расположенные на рабочих сторонах зубьев, которые соответствуют активной линии зацепления. На рисунке активные профили заштрихованы.
|

 - это угол
- это угол
|
 .
.
Коэффициент перекрытия  уменьшается при увеличении коэффициентов смещения x1 и x2. Поэтому при проектировании передачи коэффициенты смещения надо назначать так, чтобы не получился бы меньше 1,05.
уменьшается при увеличении коэффициентов смещения x1 и x2. Поэтому при проектировании передачи коэффициенты смещения надо назначать так, чтобы не получился бы меньше 1,05.
|
из
5.00
|
Обсуждение в статье: Примеры каждого вида (класса) механизмов |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы