 |
Главная |


Так как мощность реального двигателя в 2-3 раза больше Ртр выбираем двигатель из семейства двигатель-генератор типа ДГ-2ТА.
|
из
5.00
|
В качестве исполнительного элемента используем двухфазный асинхронный двигатель переменного тока , который обладает малой инерционностью и малой постоянной времени.
Для определения типа исполнительного двигателя рассчитаем требуемую мощность:
Мн × Wвв 0,8 Нм × 0,5 рад/с
Р тр = h = 0,9 = 0,43 Вт
Так как мощность реального двигателя в 2-3 раза больше Ртр выбираем двигатель из семейства двигатель-генератор типа ДГ-2ТА.
Параметры ИД:
Р ном = 2 Вт ; U у = 30 В ;
П ном = 16000 об/мин ; Т м = 0,05 с ;
М ном = 18 × 10ˉ Нм ; J д = 1,4 × 10ˉ Нм ;
М п = 34 × 10ˉ Нм ; U тр = 0,5 В .
Проверим этот двигатель на выполнение условия по перегрузке:
 |  |
Мн +Jнeн 0,8 Нм + 0,3 Нмс²·0,7 рад/с²
 i о = J д e н = 1,4 × 10ˉ Нм ·,7 радс² = 13
i о = J д e н = 1,4 × 10ˉ Нм ·,7 радс² = 13
 |  | |
Мн Jн 0,8 Нм 0,3Нмс²
 М тр = i оh + i о + J д i о e н = 10300 ·0,9 + 10300 + 1,4 × 10ˉ ×
М тр = i оh + i о + J д i о e н = 10300 ·0,9 + 10300 + 1,4 × 10ˉ ×
× Нмс²× 10300 × 0,7 рад/с² = 2,05 × 10ˉ Нм
Проверка : Мтр 2,05× 10ˉ Нм
1. Мном = 18 × 10ˉ Нм = ,11 < 2 условие выполнено
2. W тр = W н i о = 0,5 рад/с × 10300 = 5150 рад/с
p пном 3,14 × 16000
W ном = 30 = 30 = 1675 рад/с
W ном<W тр
1675<5150
условие не выполнено
Случай , когда выполняется требование по моменту (ускорению), характерен для двигателей переменного тока . Очевидно, если двигатель , имеющий запас по мощности , не удовлетворяет требованию по скорости, то , изменяя передаточное отношение редуктора, можно согласовать соотношение между требуемой и располагаемой мощностями. Новое передаточное отношение можно определить по выражению:
W ном 1675
i = Wвв = 0,5 = 3350
Если при найденном значении i выполняется условие М тр/М ном ≤ 2 , то выбор ИД можно считать законченным , т.к. этот двигатель удовлетворяет обоим условиям по обеспечению требуемой скорости и ускорения выходного вала.
Проверка:
 |  |
Мн Jн 0,8 Нм 0,3Нмс²
М тр = ih + i + J д i e н = 3350 ·0,9 + 3350 + 1,4 × 10ˉ ×

× Нмс²× 3350 × 0,7 рад/с² = 2,78 × 10ˉ Нм
Мтр 2,78× 10ˉ Нм
Мном = 18 × 10ˉ Нм = ,15 < 2 условие выполнено
Определение коэффициентов СΩ ,См ,Тм с учетом нагрузки:
Мп 34× 10ˉ Нм
С м = U у = 30 В = 1,13× 10ˉ НмВ
30(Мп –Мном) 30 ( 34× 10ˉ Нм - 18× 10ˉ Нм )
в дв = p п ном = 3,14× 16000 об/мин = 9,6× 10ˉ Нм
См 1,13× 10ˉ НмВ
С Ω = в дв = 9,6× 10ˉ Нм = 117 радВ× с
Найдем количество ступеней редуктора:
i ред = 3350 = i 12× i 34× i 56× i 78 = 4 × 5 × 12 × 14 = 3360
 | |||
| |||
4.
Для питания обмоток управления асинхронного двигателя целесообразно применить усилитель переменного тока на полупроводниковых элементах. Передаточную функцию усилителя запишем так:
Ку _
W у (Р) = Т у Р + 1 , где Ту = 0,02 с
Найдем Ку исходя из заданной суммарной погрешности:
D j å = D j иэ + D j зз + D j мш + D j уск ,
где
 D j å = 2,5' D j иэ = 1,0' D j мш = 1,0'
D j å = 2,5' D j иэ = 1,0' D j мш = 1,0'
D j зз + D j уск = D j å - ( D j иэ + D j мш )= 2,5' - 1' – 1' = 0,5'
eн 1
D j уск = К ( Т у + Т м – К )
1
D j зз = К у
Пусть добротность К = 600 1/с , тогда
0,7·3438' 1
D j уск = 600 · ( 0,02 + 0,1 – 600 ) = 0,47'
Отсюда вычислим Ку :
1_
К = К 1 · К у · С W · К ред , где Кред = i ред
( К× iред ) ( 600 1/с · 3350 ) _
К у = ( К 1 · С W ) = ( 5 · 10ˉ³ В/угл.мин · 117 · 3438'/В · с ) = 1000
1 _
D j зз = 1000 = 0,001
D j Σ = 1' + 1' + 0,001' + 0,47' = 2,471'
D j Σр < D j Σз
условие выполнено
5.
Передаточные функции отдельных звеньев:
Так как в параллель измерительному элементу ставим тахогенератор,
в системе будет отсутствовать скоростная ошибка если:
К1 5 мВ/угл.мин
К ТГ = К = 600 1/с = 0,008 мВ·с / угл.мин
Крутизна тахогенератора :
К ТГ = 1 ¸ 5 мВ/об/мин
3 мВ·с_
Выберем К ТГ = 3 мВ/об/мин = 0,1·3438΄ = 0,008 мВ·с/ угл. мин
 |
W 1 (Р) = К 1 ;
W ТГ (Р)= К ТГ Р ;
1000 _
W у (Р) = (0,02Р + 1) ;
СW _ 117 _
W дв (Р) = Р(Т м Р + 1) = Р(0,1Р + 1) ;
Передаточная функция исходной системы:
К _ 600 _
W исх (Р) = Р(Т м Р + 1)(Ту Р + 1) = Р(0,1Р + 1)(0,02Р + 1)
Проверка на устойчивость системы:
11
К ≤ Т у + Тм
600 ≤ 1/0,02 + 1/0,1
600 ≤ 60
условие не выполняется
( система не устойчива )
6.
L /W(jω)/:
20 lg К = 20 lg600 = 20 · 2,7782 = 55
ω у = 1/Т у = 1/0,02 = 50 1/с ;
lg50 = 1,7
ω д = 1/Т м = 1/0,1 = 10 1/с ;
lg 10 = 1,0
L /W ж (jω) /:
4×p 4 × 3,14
ω ср = t пп = 0,3 = 42 1/с ;
lg 42 = 1,6
ω 3 = 3 × 42 = 126 1/с ;
lg 126 = 2,1
ω 2 = ω 3 /10 = 126/10 = 12,6 1/с ;
lg12,6 = 1,1
ω 1 = lg 1,15 = 0,06
К _
W исх ( jω ) = jω (Т м jω + 1)(Ту jω + 1)
К(Т2 jω + 1) _
W ж ( jω ) = jω (Т 1 jω + 1)(Т 3 jω + 1)²
Φ / Wисх ( jω ) /:
φ исх = -90˚- arctgT y ·ω - arctgT M ·ω
φ исх (ω 1) = -90˚- arctg 0,02 · 1,15 – arctg 0,1 · 1,15 = - 98˚
φ исх (ω 2) = -90˚- arctg 0,02 · 12,6 – arctg 0,1 · 12,6 = - 156˚
φ исх (ω ср) = -90˚- arctg 0,02 · 42 – arctg 0,1 · 42 = - 207˚
Φ /W ж (jω) /:
φ ж = -90˚- arctgT 1 ·ω –2· arctgT 3 ·ω + arctgT 2 ·ω
T 1 =1/ω 1=1/1,15=0,87с; T 2 =1/ω 2 =1/12,6= 0,08с; T 3 =1/ω 3 =1/126= 0,008с
φ ж (ω1) = -90˚- arctg0,87·1,15 – 2· arctg 0,008· 1,15 + arctg0,08· 1,15 = - 131˚
φ ж (ω2) = -90˚- arctg0,87·12,6 – 2· arctg 0,008· 12,6 + arctg0,08· 12,6 = - 139˚
φ ж (ωср) = -90˚- arctg0,87· 42 – 2· arctg 0,008· 42 + arctg0,08· 42 = - 140˚
φ ж (ω3) = -90˚- arctg0,87· 126 – 2· arctg 0,008· 126 + arctg0,08· 126 = - 186˚
Δφ = - 180˚- φ ж (ω ср ) = - 180˚- (- 140˚) = 40˚
ΔL = 14дБ
7.
Требуемая ЛАЧХ должна быть получена при введении корректирующего устройства в виде обратных связей ( по заданию ) .
Применение отрицательных обратных связей в качестве корректирующих устройств имеет ряд преимуществ . Они снижают влияние нелинейных характеристик тех участков цепи регулирования , которые охватываются обратными связями, снимают чувствительность к изменению параметров звеньев , уменьшают постоянные времени звеньев, охваченных обратной связью. На практике при проектировании следящих систем обратной связью чаще охватываются усилитеьные и исполнительные устройства.
Передаточная функция части системы , охваченной обратной связью, имеет вид: W охв ( P ) _
Wобщ(P) = (Wохв(P) Wос(P) + 1)
Передаточная функция всей скорректированной системы определяется выражением:
Wск(P) = Wобщ(P) Wн(P)
где W н ( P ) – произведение передаточных функций последовательно включенных звеньев основного канала , не охваченных обратной связью;
Найдем передаточную функцию обратной связи Wос(P) с использованием передаточной функции системы с последовательным корректирующим устройством.



1 1 _ Ky СW _
W ос ( P ) = W охв ( P ) W к ( P ) – 1 ; W охв ( P ) = Р( T y P + 1) ( T м P + 1)
L / W к ( jω ) /= L / W ж ( jω ) /- L / W исх ( jω ) /
По разности этих характеристик определяется тип корректирующего устройства и выбираются его параметры .
В нашем случае используем часто применяемый в следящих системах с последовательным корректирующим устройством интегродифференци-рующий контур с передаточной функцией:
(Т1Р + 1)(Т2Р + 1)
W к ( P ) = (Т 3 Р + 1)(Т 4 Р + 1)
Известно, что для коррекции обратной связью на основании интегродифференцирующего контура существует передаточная функция:
Т'Р _
W ос ( P )= (Т 1 Р + 1)
Эта передаточная функция соответствует передаточной функции дифференцирующего контура.
10.
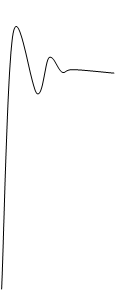
Построим переходной процесс одним из численных методов с приме-нением ЭВМ.
|




|

|
По этому графику переходного процесса проведем анализ качества следящей системы с выбранным корректирующим устройством.
Переходной процесс характеризуется перерегулированием δ = 28 % и заканчивается за время t рег = 0,02 с
Список литературы
1. А.А. Ахметжанов, А.В. Кочемасов «Следящие системы и регуляторы» для студентов вузов. - М. : Энергоатомиздат, 1986г.
2. Смирнова В.И., Петров Ю.А., Разинцев В.И. «Основы проектирования и расчета следящих систем». - М. : Машиностроение, 1983г.
3. Бесекерский В.А., Попов Е.П. «Теория систем автоматического регулирования». – М. : Наука, 1972г.
|
из
5.00
|
Обсуждение в статье: Так как мощность реального двигателя в 2-3 раза больше Ртр выбираем двигатель из семейства двигатель-генератор типа ДГ-2ТА. |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы